new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot (31 Jul 2010, DanAukes)
Rise Web>ClimbingRobot (31 Jul 2010, DanAukes)

StickyBot does windows |
RiSE Project WebWelcome to the Stanford wiki for the Robots in Scansorial Environments project at the Stanford Biomimetics and Dexterous Manipulation Lab. This website is primarily intended as a shared electronic notebook for members of the RiSE Consortium. Visitors are welcome to peruse the public pages. Topics on this homepage: Additional navigation links can be found in the left menu bar. Full WebMap |
Projects under RiSE at Stanford
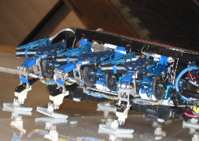 RiSE-I on plexiglass |
Rise Platforms
|
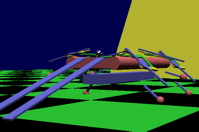 Arachi simulation of RiSE platform | Simulation and analysis |
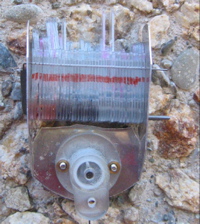 July05 integrated foot on concrete |
Climbing Feet and Ankles
|
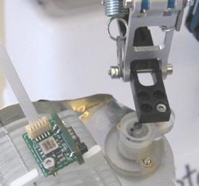 accelerometer on toes |
Leg and Foot Sensing
|
 MicroAdhesives | MEMs and Nano Technology Development |
Events and Publications
- Publications and Presentations
- What's new in RiSE at Stanford?
- Videos, media: our own videos + links to appearances in the media
- Calendar -- group meetings, events
- Presentations
People
Contact Information
- Location: MERL Bldg. 660, Rm 132
- Lab phone: (650) 723-4258; conference speakerphone: (650) 723-2070
- Fax: 650-723-3521
- Map and directions
External Links
- RiSE consortium members
- main RiSE website at U. Penn
- Stanford Biomimetics project 2000-2003 (Sprawl hexapedal robots)
- Berkeley polypedal twiki site (requires login and password)
- RHex project
- New Docushare collection for RiSE; Old Docushare on dart
- New Calendar (webdav); Old Biomimetics calendar (calcium)
- old RiSE site at U. Michigan
Old Stuff...
- Old Climbing Docushare folder, NewDocushare folder
- Stanford Biomimetics homepage, web Calendar for SU Biomimetics and RiSE
- New RiSE project page (under construction) and StanfordOffice contact info.
- U Michigan RiSE site (protected)
-
- TeleconNotes? and instructions + Stanford Webcam
- WorkingGroups and discussions
- other ProjectManagement topics
- FootDesign, LegDesign, FootSensingAndActuation, LegSensingAndActuation
- ManufacturingHome -- how we make the feet
- StanfordTestTrack and associated TrajectoryAnalysis
- RobotPlatform (the overall platform); RobotSimulation, ManufacturingHome
- RobotSimulation and RobotAnalysis
- BioClimbing -concepts and principles from biology and links to sources (claws, sticky pads, toes, spines, etc.)
- ClimbingEndnote is a link to Endnote bibliographies
- ClimbingConcepts -various engineering concepts (bio-inspired or not) for climbing. Includes specialized designs for legs, feet, claws, toes... as well as ideas about chemical adhesives, synthetic dry adhesives, etc.
- OtherClimbingRobots - Information on current state of climbing robots
- Electronics and SenseCompComm
- Initial discussion about sensing, computation, and communication for RiSE- SenseCompComm, as well as open discussion on the same topic - RiSECompComm
- Design discussion and ideas for electronics integration and hardware -- CentralElectronics
- Private? Private web added
- For fun: ClimbingMusic - tunes related to the Rise Project and the JamesBondRobot
- PrivateRiSE? has links to private materials for the project
- RiSE_pdfs.zip: RiSE_pdfs.zip
Ideas, requests, problems regarding TWiki? Send feedback