new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > LegSensingAndActuation>LegSensingTest (28 Sep 2004, YongLaePark)
Rise Web>ClimbingRobot > LegSensingAndActuation>LegSensingTest (28 Sep 2004, YongLaePark)
- NewStrainGageCalibration
- TestTrackStrainGageTest
RiSE Leg Strain Gage Test and Calibration
-- JonathanKarpick - 08 Sep 2004:- Re-did pseudo Inverse with all data at the same time, taking the initial zero reading as the offset and then doing C=F*pinv(V) (same as C=F/V):
C = [-3.9742, 1.4454; -0.4903 -1.9995]
for C=[Cxs Cxc; Cys Cyc] - YongLae's test data:
- Test data with subsequent fit:
- MATLAB Script attached:
StrainGageTestData.m
Objective
- Read the forces RiSE legs take through strain gages while climbing and give them as inputs to control the robot for better climbing
Test Setup and Measurement
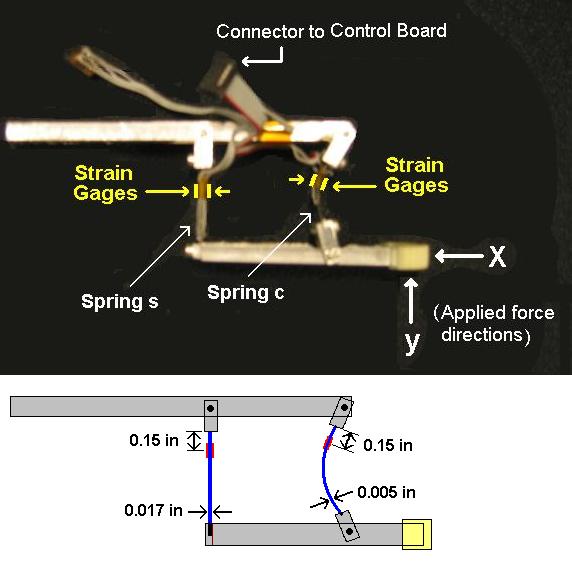
- Strain gages are attached on both sides of each spring which connects the lower leg and the upper leg as shown in the picture.
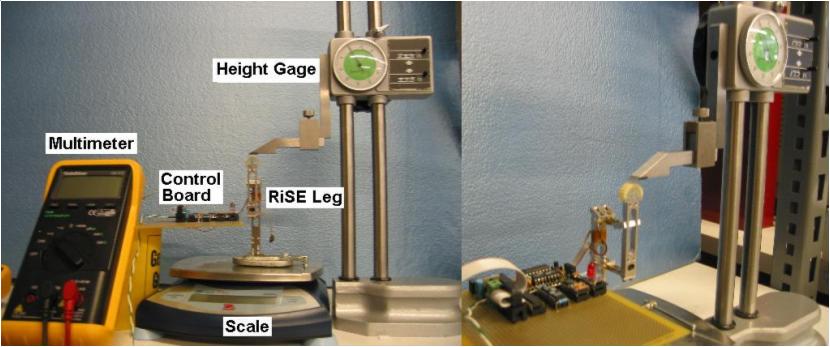
- Constant increase of in one directional (either x or y axis) displacement has been made on the leg using a height gage.
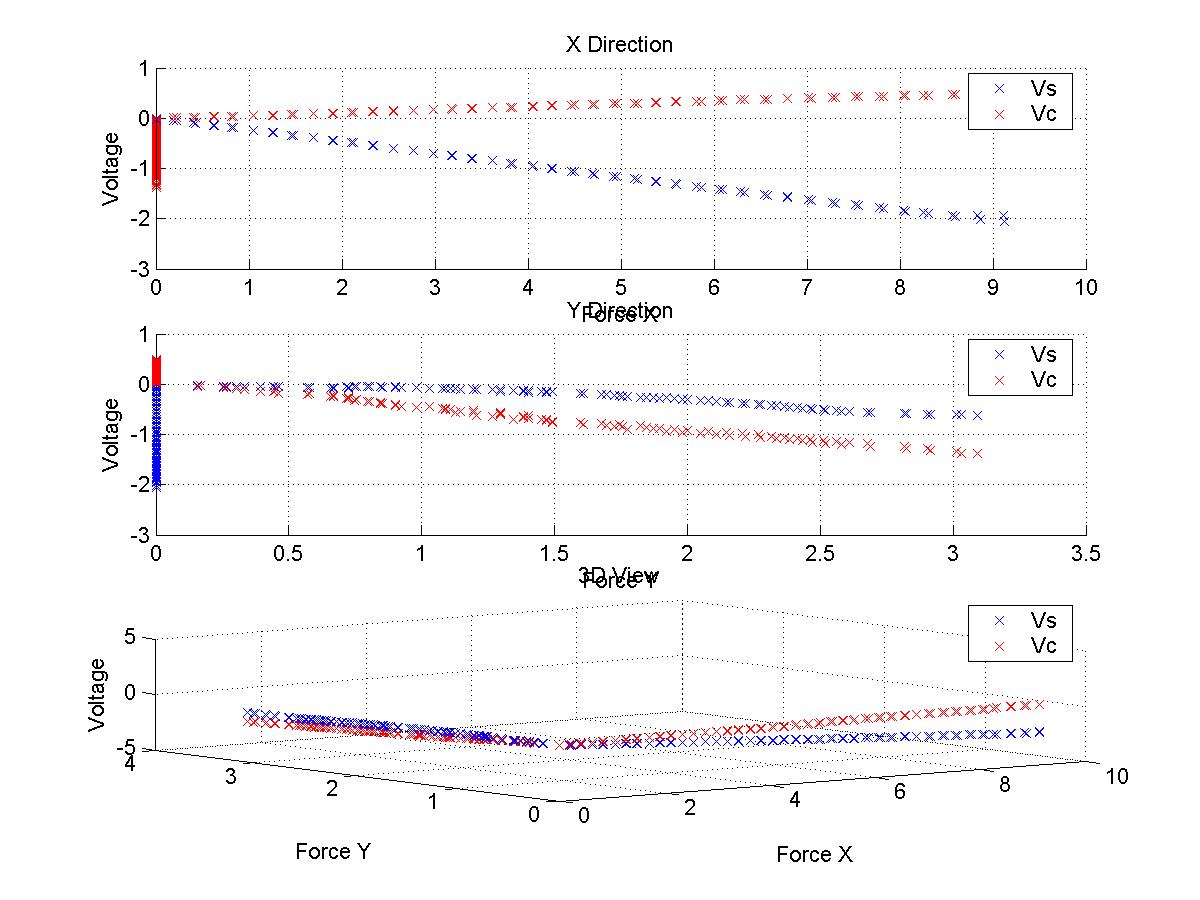
- On each displacement, applied force and output voltages (V_s and V_c) from strain gages are measured using a scale and multimeters.
- V_s: Voltage output from spring s (straight).
- V_c: Voltage output from spring c (curved).
Test 1: Displacement in x axis
- Displacement of the the feet has been made only in x axis, and the applied force and voltage outputs are measured.
- Displacement was made up to 0.4 inch in every 0.01 inch.
- Test setup:
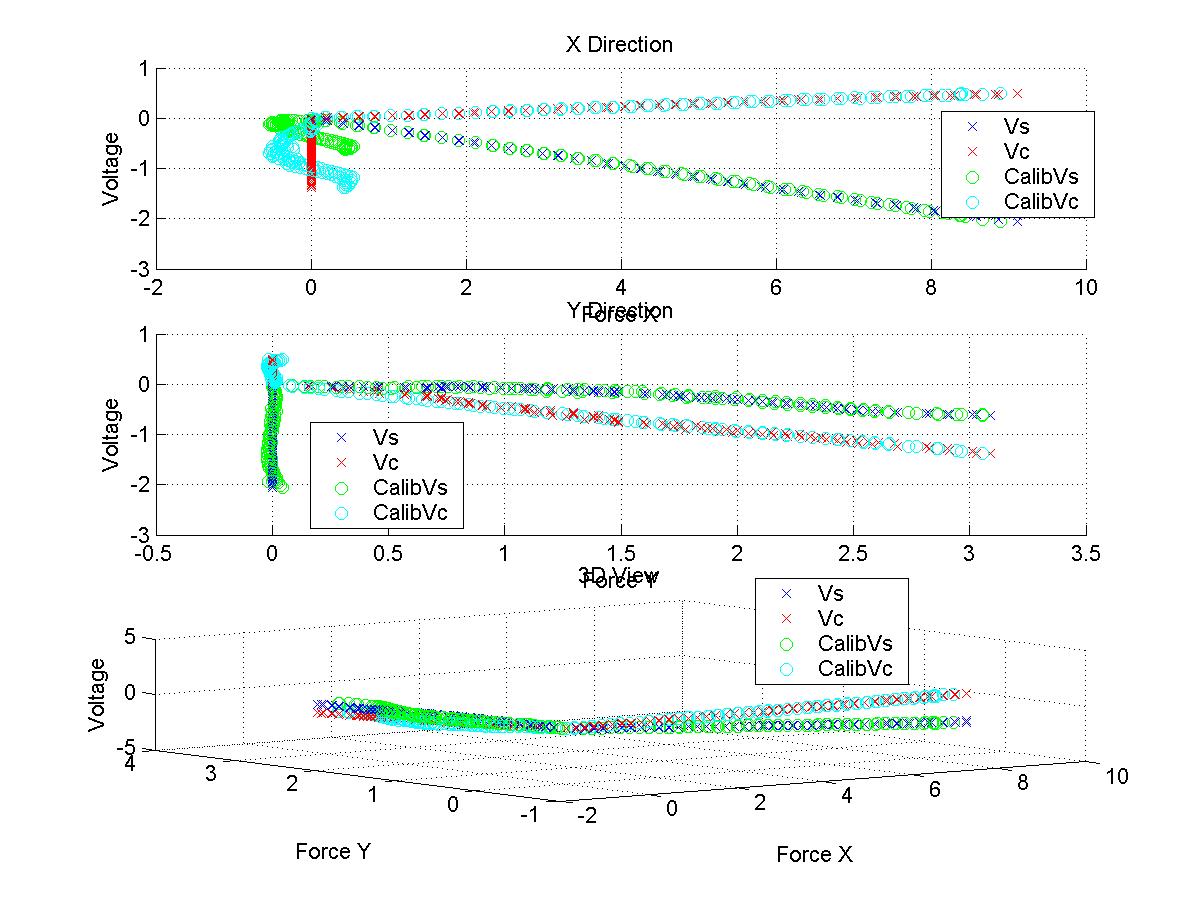
- Test Result:
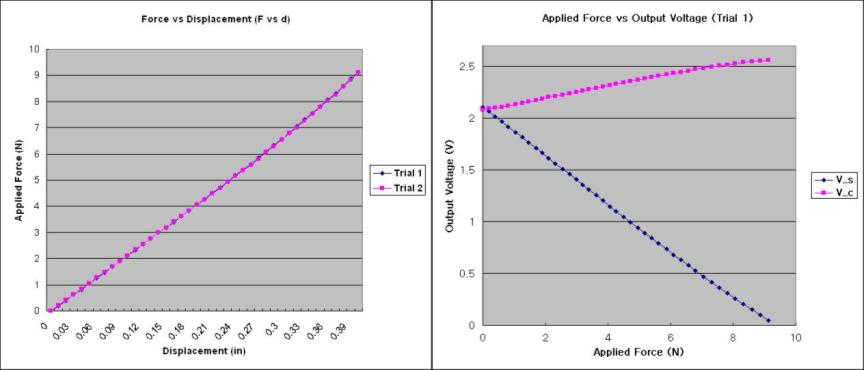
- Test Data: StrainGageTestData_X.xls
Test 2: Displacement in y axis
- Displacement of the the feet has been made only in y axis, and the applied force and voltage outputs are measured.
- Displacement was made up to 0.5 inch in every 0.01 inch.
- Test setup:

- Test Result:
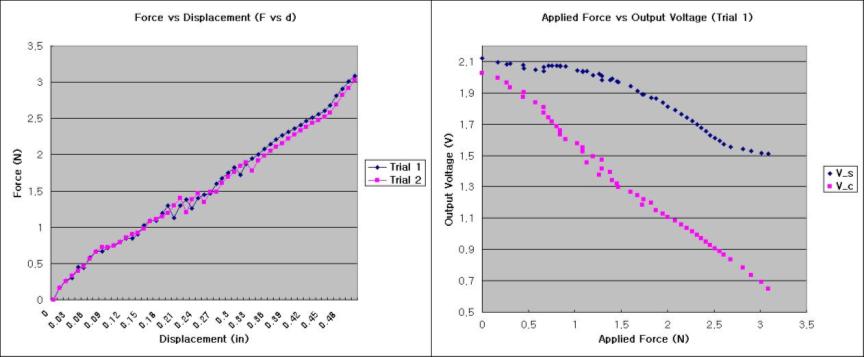
- Test Data: StrainGageTestData_Y.xls
Calibration
Calibration Matrix (C)
1. Pseudo Inverse- Since we are interested in how the voltage change affect the force change (not the intercept of the F-V graph but the coefficients), I moved all the measured V_s and V_c data in parallel where the initial points (when the force is 0) meet zero. Then, I performed the same pseudo inverse.
- F = C * V => C = F * pinv(V)
- F: 2 x n force matrix
- V: 2 x n output voltage matrix
- C: 2 x 2 calibration matrix
F_x = |f_x1, f_x2, ..., f_xn| F_y = | 0 , 0 , ..., 0 |
| 0 , 0 , ..., 0 | |f_y1, f_y2, ..., f_yn|
V_1 = |v1_s1, v1_s2, ..., v1_sn| V_2 = |v2_s1, v2_s2, ..., v2_sn|
|v1_c1, v1_c2, ..., v1_cn| |v2_c1, v2_c2, ..., v2_cn|
C = |c11, c12|
|c21, c22|
C_x = F_x * pinv(V_1)
C_y = F_y * pinv(V_2)
- Result
- C_x = [ -6.7593, -9.9989 ; 0, 0 ] - Calibration matrix with x-axis force (Test 1)
- C_y = [ 0, 0 ; -0.4243, -1.9885 ] - Calibration matrix with y-axis force (Test 2)
- Therefore, calibration matrix is: C = [ -6.7593, -9.9989 ; -0.4243, -1.9885 ]
- F = C * V
|F_x, 0 | = |c11, c12| * |V_1, V_2|
| 0 , F_y| |c21, c22|
- Result
- C = [ -3.9665, 1.3981 ; -0.4790, -1.9691 ]
- I calculated only c11 and c22 assuming c12 and c21 are zero (ignoring V_c in Test 1 and V_s in Test 2) using pseudo inverse. In this case, the measured data were moved in parallel to have zero initial points.
- Result
- C = [ -4.3258, 0 ; 0, -2.1372 ]
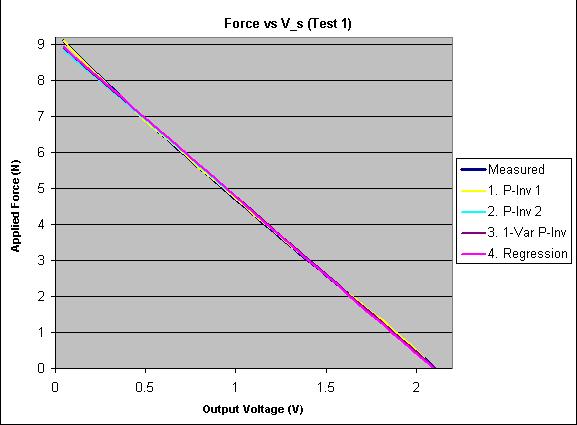
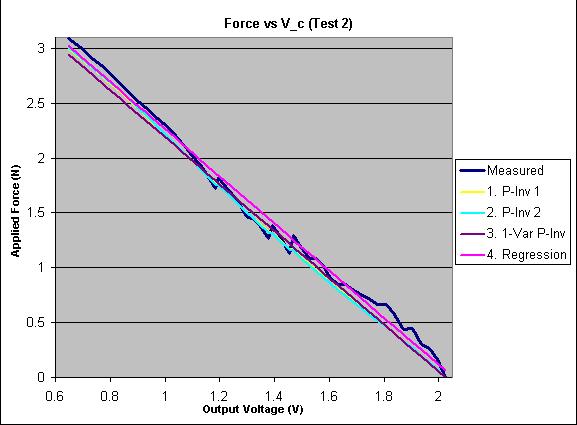
- Since it is clear that V_s is more important for Test 1(x-axis force) and V_c for Test 2(y-axis force), I performed simple linear regression to find the best fit slopes, s1 and s2, of F-V_s plot in Test 1 and F-V_c plot in Test 2, which are comparable with c11 and c22 in matrix C.
- Result
- Test 1: F = - 4.3604 * V_s + 9.1307 => s1 = -4.3604
- Test 2: F = - 2.1510 * V_c + 4.4151 => s2 = -2.1510
- C = [ -4.3604, 0 ; 0, -2.1510 ]
Result Comparison
- F vs V_s (Test 1):
- F vs V_c (Test 2):
Ideas, requests, problems regarding TWiki? Send feedback