new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>RisePlatform (31 Dec 2010, MarkCutkosky)
Rise Web>RisePlatform (31 Dec 2010, MarkCutkosky)
RiSE Platform DescriptionThe Rise Platform is an early prototype of the RiSE Robot from Boston Dynamics, developed by the RiSEConsortiumMembers. The robot is a hexapod with two degrees of freedom per leg. When equipped with spiny feet (adapted from SpinyBot), it can climb concrete, brick and stucco walls. The legs are designed to fold inward for trotting on horizontal surfaces and sprawl outward for climbing, as seen at right during demonstrations at SWRI. A four-legged variant of the RisePlatform, QuadraRiSE, has been used at Stanford to test climbing gaits and control algorithms. The RiSE platform runs QNX 6.1.0 on a Geode 266MHz processor. The body (v1.0) contains 12 Maxon RE motors and a 4-bar linkage connected through a differential (v1.2 uses a belt drive system) that reveals 2 DOF (wing and crank angle) per leg. The leg position is controlled by RMCs (RiSE motor controller) that use PD control. Currently the body uses LSANs (leg sensing and actuation node) to collect sensor info (accelerometer, potentiometer on 4-bar joint) for feedback. Generarally, BDI designed the robot hardware, CMU devloped the software, and Stanford developed the feet and some related sensing. |
RiSE on library wall at SWRI, San Antonio, TX, April 06

|
Partial list of RiSE pagesRiSEExperimentLogLog of experiments run on various RiSE platformsQuadraRiSEInformation regarding the quadraped version of RiSE.RisePlatformStatusThis page contains a log of the platform related operations issues (ie. when/why is has been operational/available for testing or not).RisePlatformSetupThis page contains some more general information about the robot configuration (ie. battery, charger, wireless, direct connect, and software info).RisePlatformTestInstructionsThis page contains info on how to operate the robot (ie. starting the robot and related hardware/software to get things working).RiSEPlatformUpdatingCodeNotesThis page contains some basic information on how to update/change to code that operates the robot platform.RiSEPlatformAlanCodeCommentsStuff written down by Alan about what the various modules, modes, and other many undocumented functions in the RoboDevel? directory do.RisePlatformGaitBuilder
|
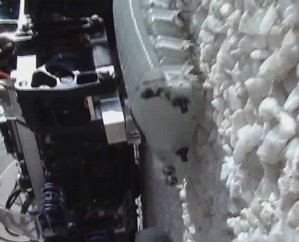
Detail of spiney feet (see RiSE FootDesign)
|
RiSERelatedParts? (Private)
This is a source for more information on RiSE parts and ordering info for replacement.Ideas, requests, problems regarding TWiki? Send feedback