new web: http://bdml.stanford.edu/pmwiki
TWiki > Manufacturing Web>ManufacturingHome>SDMOverviewAndLinks (29 Apr 2011, MarkCutkosky)
Manufacturing Web>ManufacturingHome>SDMOverviewAndLinks (29 Apr 2011, MarkCutkosky)
|
Contents:
Sub Pages (Full WebMap) |
SDM Overview
- 2005 M. Hatanka's Ph.D. thesis on SDM with embedded flexible elements across material boundaries (17MB PDF)
- 2004 Slides (PDF) on "Parameterizing materials and manufacturing" for biomimetic structures -- from Rise.RiSE teleconference presentation by MarkCutkosky
- 2003 ASME Paper (PDF) on extending SDM to embed flexible materials (e.g. kevlar fibers) into 3D multi-material structures (e.g. for improved strength) by MotohideHatanaka
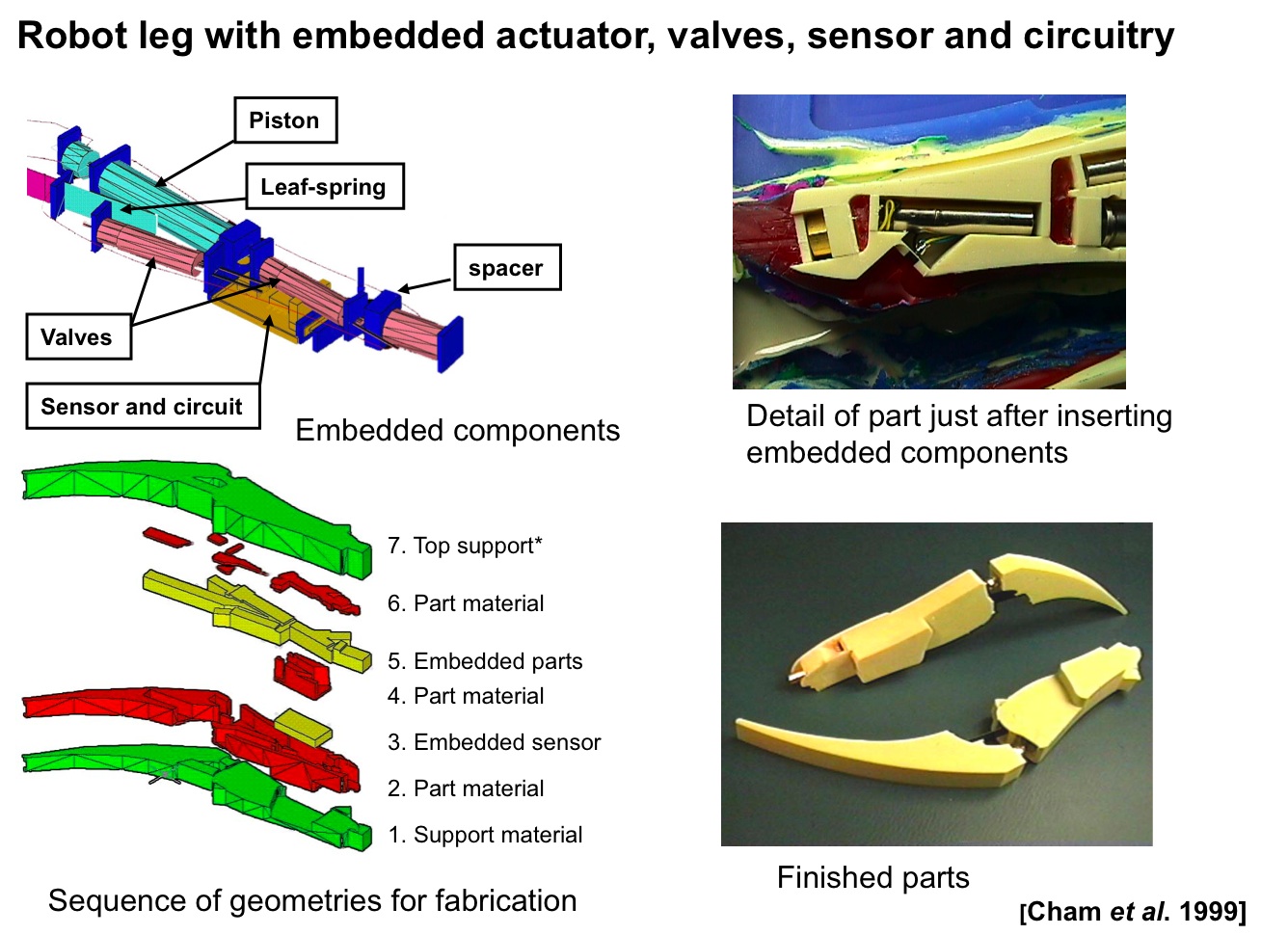
- 2002 IJRR paper (PDF) on use of SDM for bio-inspired legged robots
- 2000 ASME paper (PDF) on materials modeling of SDM parts for bio-inspired robots
- 1999 ASME paper (PDF( on SDM process planning for multi-material prototypes
SDM Process Tutorials
These pages contain all the information you should need to create an SDM part from start to finish:- SDMUsingPolymers - Pouring polymers safely, waste disposal, polymer details (cure-times, mix ratios, hardness, etc)
- UnigraphicsTutorial - Basics of setting up a part in SolidWorks? , importing parts into Unigraphics, creating a basic planar mill operation, basic post-processing.
- UnigraphicsQuickReference - quick overview/reminder of the steps in Unigraphics
- MachiningOnTheHAAS - How to use the HAAS, downloading toolpaths, running programs, planing blocks
- HAASToolTable - Information about feed rates and cut depths, etc. for the tools on the HAAS
- SDMConsumableMaterials - All the supplies needed to SDM and where to restock them
- SDMProcessNotes contains useful information about the SDM process, including a tutorial and much more (urethane properties, end mills, etc...)
- SDMTutorialNotes - A comprehensive tutorial of the SDM process
- YoungsModuliForUrethanes
- SDMFabTechniques - Various useful SDM techniques
- UrethaneWaste - How to deal with the hazardous waste
- PressureSensing describes MiguelPiedrahita'a work with creating sealed chambers using SDM, for use in foot pressure sensing.
- In-situ mechanism analysis -- Rajagopalan and Cutkosky 2003 ASME transactions paper on statistical analysis for mechanisms created via SDM and other layered manufacturing processes.
- Discussion topic: ParametricDesign 2-20-04 MarkCutkosky - A new page created to summarize ideas about parameterizing the design space biodynotic robots.
Links and examples
- StickyBot toes are among the most advanced examples of multi-material SDM parts with embedded fibers.
- SpinyBot and spined RisePlatform toes are another good example of multi-material SDM structures with tailored compliance properties in different directions.
- The exoskeletal finger built for the IFOS/NASA PhotonicRobots project is a good example of light-weight, hollow structure with embedded sensors
- Stanford Rapid Prototyping Lab -- the home of SDM at Stanford:
- The Biomimetics SDM pages (1999 ONR MURI) --
- MotohideHatanaka 's SDM pages: Moto's publications and presentations
- Docushare collection on Rapid Prototyping (papers, presentations).
- Useful Molding techniques and materials summary from Duke University.
 -- AlanAsbeck - 16 Jun 2008
-- AlanAsbeck - 16 Jun 2008 Ideas, requests, problems regarding TWiki? Send feedback