new web: http://bdml.stanford.edu/pmwiki
TWiki > Haptics Web>StanfordHaptics (31 Jul 2010, DanAukes)
Haptics Web>StanfordHaptics (31 Jul 2010, DanAukes)
-- Started 10 Aug 2004, MarkCutkosky
|
Stanford CDR Haptics Main PageWelcome to the Stanford wiki for the Dexterous Manipulation Lab. This website is primarily intended as a shared electronic notebook for researchers in the lab. Visitors are welcome to peruse the public pages. Topics on this homepage: |
Projects:
Current
 |
|
 |
|
 |
|
 |
|
 |
|
- TactileSensingChapter - Book chapter on tactile sensors
Past
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
Other Topics
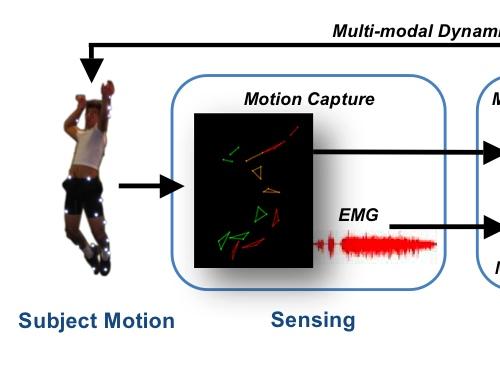
- MultiModalTactileSensing -- creating a new page 09-02-05 to gather some notes (MarkCutkosky)
- PresentationSchedule
Literature and Links
- HapticsLiterature -- probably will be cross-linked into various projects.
- HapticsPictures
- HapticsSeminarSpring07ME393
- Touch Docushare on new wikibox2
- HapticDisplay - especially tactile
- TouchPerception?
- SDM Process Notes- links to information about the SDM process
- SDM Tutorial Notes - information about creating toolpaths and using the Haas
- TactileChapterReferences - refs for the TactileSensingChapter
Ideas, requests, problems regarding TWiki? Send feedback