new web: http://bdml.stanford.edu/pmwiki
TWiki > Haptics Web>WirelessInteraction? >ImmersionProject (18 Nov 2004, KarlinBark)
Haptics Web>WirelessInteraction? >ImmersionProject (18 Nov 2004, KarlinBark)
STTR Immersion Project Overview
Detailed Report Several studies have shown that force and vibration feedback can improve operator performance in maneuvering and manipulation tasks and can reduce the training needed to achieve a level of skill. However, other studies have shown little improvement resulting from haptic feedback. These conflicting results suggest that careful design of the force and vibration feedback mechanisms and attention to the particular task requirements are needed to realize any benefits. In particular, haptic feedback appears to be beneficial when it reduces an operator's need to concentrate on indirect visual cues for information about contacts and dynamics. Haptic display also permits the operator's physical reflexes to come into play, expediting skill acquisition.Summary of Testing and Results
Subjects participated in simulated exercises for clearing a damaged building and identifying obstacles in a virtual environment.Task 1
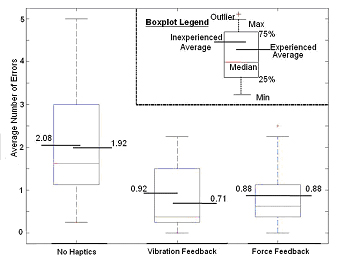
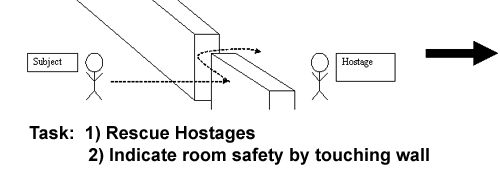 Subjects made fewer errors with haptic feedback
Subjects made fewer errors with haptic feedback
Task 2
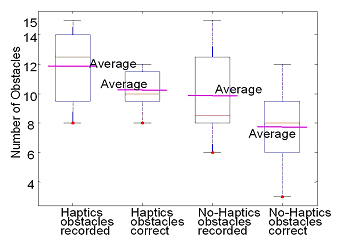
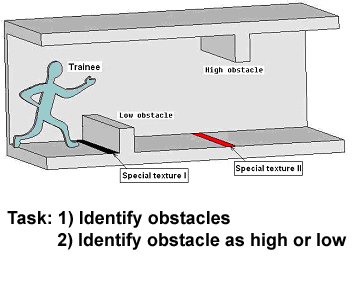 Users identified obstacles more quickly and accurately with haptic feedback
Users identified obstacles more quickly and accurately with haptic feedback
- graph2.jpg:
Conclusions
- Haptic feedback improved performance in each test.
- After modifications to the collision display algorithm, force feedback produced results equal to vibration feedback and was preferred by most subjects.
- The main utility of the force feedback may be in providing cues correlated with events rather than a realistic rendering of forces.
Ideas, requests, problems regarding TWiki? Send feedback