new web: http://bdml.stanford.edu/pmwiki
TWiki > Haptics Web>StanfordHaptics > SkinStretchAndFriction>ContactLocationDisplay (07 Sep 2005, MarkCutkosky)
Haptics Web>StanfordHaptics > SkinStretchAndFriction>ContactLocationDisplay (07 Sep 2005, MarkCutkosky)
Contact Location Display
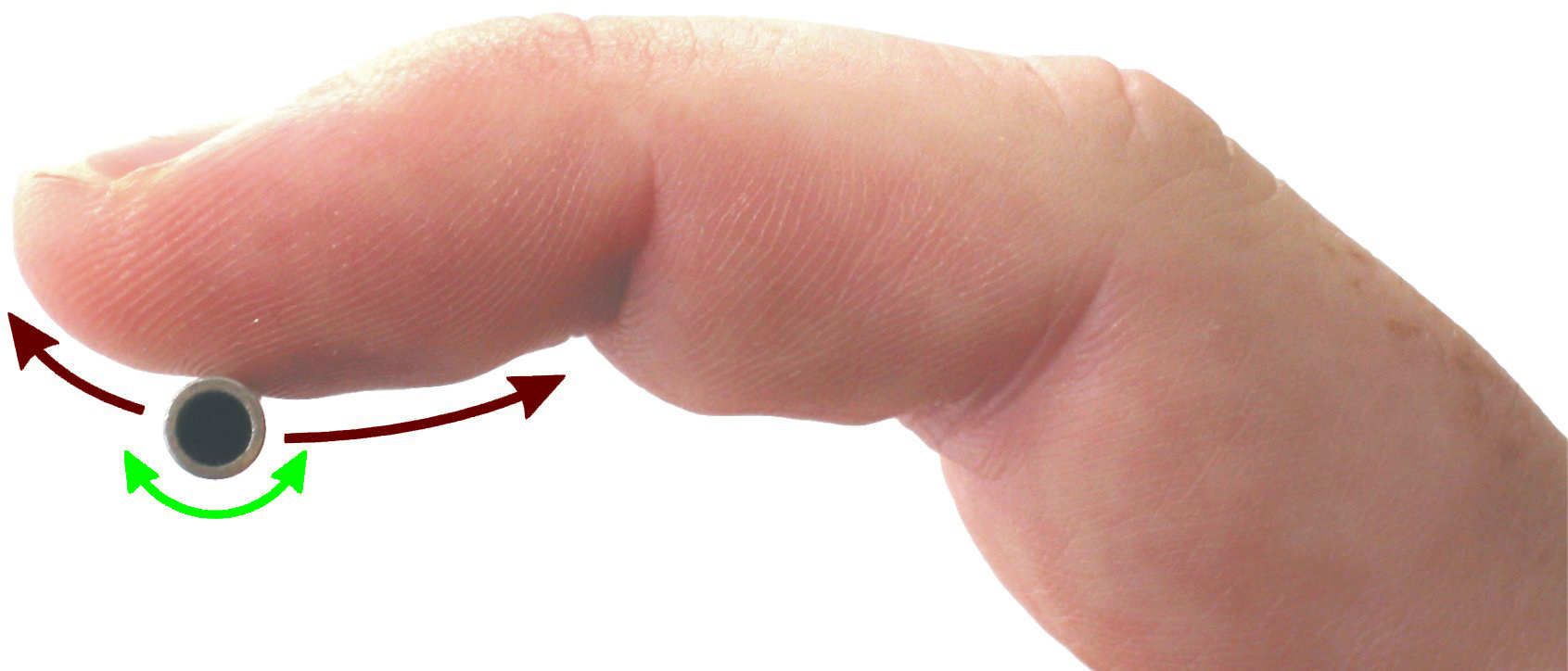
As an alternative to other forms of tactile display, we have investigated the idea of simply displaying the centroid of contacts along with force feedback. In concept this would be analagous to representing contact as if it were a ball bearing moving over the surface of a finger. Details are provided in Kuchenbecker et al. 2004 and Provancher et al. 2003 and in Provancher, et al., "Contact Location Display for Haptic Perception of Curvature and Object Motion," International Journal of Robotics Research, Vol 24, No 9, 2005- Video illustrating contact location display (80 MB Quicktime movie - right click to download)
Contact Location Display concept (General case and planar version of concept)

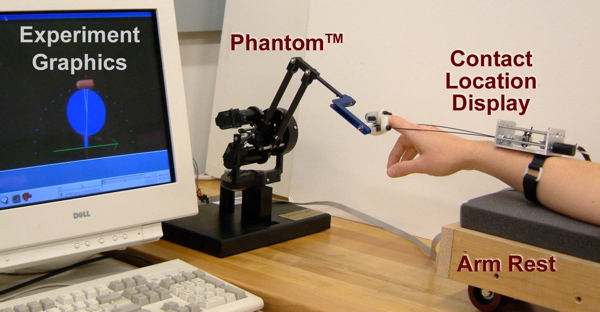
 There have been several incarnations of this device. The current design incorporates a DC motor, push-pull wires and thimble attached to a PHANToM haptic device.
There have been several incarnations of this device. The current design incorporates a DC motor, push-pull wires and thimble attached to a PHANToM haptic device. 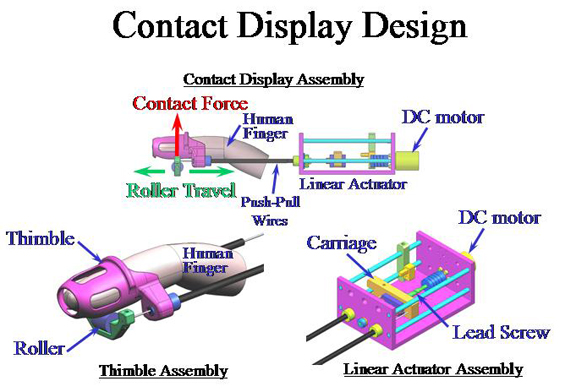
- location display on Phantom:
William Provancher
Ideas, requests, problems regarding TWiki? Send feedback