
Stickybot from inside MERL
|
what's new?
Key Ideas:
Stickybot is an embodiment of our hypotheses about the requirements for mobility on vertical surfaces using dry adhesion. The main point is that we need controllable adhesion. The essential ingredients are:
- hierarchical compliance for conforming at centimeter, millimeter and micrometer scales,
- anisotropic dry adhesive materials and structures so that we can control adhesion by controlling shear,
- distributed active force control that works with compliance and anisotropy to achieve stability.
These ideas are explained in more detail in RisePublications on Stickybot and Directional Adhesion.
|
Stickybot Links
What's new

July 2010:
StickyBot is retired and is replaced by
StickyBotIII .
July 2009:
Stickybot III is under development, with the goals of providing more robustness and more controllable DOF per limb.
May 2009:
S. Kim, et al., "Smooth Vertical Surface Climbing with Directional Adhesion" receives
King-Sun Fu Memorial Best Transactions on Robotics Paper Award.
Feb 2009:
StickyBot (and
Sanjay) accompany
Bob Full at TED 2009
October 2008: Using new 2-layer hierarchical adhesives, Stickybot can climb wood panels, painted metal and other surfaces without changing control settings from those used on surfaces like glass.
September 2008:
StickyBot featured on
Science Channel.
March 2008:
Stickybot and other bio-inspired creations featured in the April 2008 issue of National Geographic magazine.
Aug 2007:
Videos of Stickybot and two-toed version of SB2 climbing outside, rehearsing for
DarpaTech 2007
July 2007: We finally are starting to get some hierarchical directional, patches that look promising... Details in (private)
HierarchicalFabrication? page. (To be made public soon -- meanwhile you can look at
HierarchicalStructures general concepts page.)
25 May 2007:
SbTwo is climbing, almost as well as
StickyBot
14 April 2007:
New papers and a
new short video presented at
IEEE ICRA07 (5 MByte, requires Quicktime).
20 July 06 -- Video of
climbing with diagonal stride gait (65MB). Ongoing work is focused on force sensing & control and various other refinements.
28 June 06 -- (Private)
SbTwo Video of climbing with diagonal stride(6MB) (versus tripedal) gait at 0.8m/min (faster). Not only does it allow faster climbing but also it reduces unwanted swinging motion that causes premature detachment.This should permit faster dynamic climbing, ultimately.
14 June 06 -- New patches to be sent away - (Private)
PatchPrototypes
13 June 06 -- Movie of test results of anistropic patches (Private)
AnisoPatches
05 June 06 -- To facilitate parallel work on anisotropic adhesive pads and the
StickyBotController we decided to create a sibling for Stickybot:
SbTwo (Stickybot 2).
Here is a first video of
climbing with anisotropic adhesive pads (2 MB). --
Sangbae Kim
Note that although the control is clearly not optimized it already climbs better and with lower detachment forces.
- More about SbTwo design modifications on its own new page.
24 May 06 Stickybot has experienced a
small flurry of web traffic...
5 May 06 -- The following video clip illustrates
anisotropic (directional) compliant adhesion, as compared to conventional double-sided tape. The anisotropic patches work on a range of smooth surfaces (glass, acrylic plastic, glazed ceramic tile). They stick when loaded in
shear in the desired loading direction. Adhesion is very low when loaded in the contrary direction. This capability, inspired by the results from
Prof. Kellar Autumn on gecko adhesion, allows a climbing machine to attach and detach the feet with minimum preload and mininimum disturbance. (This capability is also in contrast to the isotropic materials using microfibers, nanotubes, etc. that a number of researchers have been developing.)
20stock_45tip_380umhair.JPG
The material in the video consists of stalks at an angle of 20 degrees with respect vertical. The tips present a face angled at 45 deg. with respect to vertical.
17 Apr 06 --
Spatular.JPG The First spatular tip at a (large) micro scale. These features are inspired by the spatular tips at the ends of gecko setae. They increase the real area of contact and increase adhesion. A
new molding process, which involves a combination of capillary action and exposure of the top surface to atmospheric moisture, is used to created graded material properties so that the features are softest at the tips. A provisional patent has been filed on this and related methods for creating anisotropic adhesive materials. The next stage of development is to obtain similar "spatular" geometries at about 1/10 the size of these, with a correspondingly stiffer material.
01 Apr 06 --
Stickybot_040106.mov: Stickybot on MERL window (25MB Mpeg4). This short video shows Stickybot climbing a glass window and a plastic panel showing the attachment and detachment. In this video the robot is using
isotropic sticky patches. Performance will be better with
anisotropic patches. If you look carefully you can see that the attachment and detachment forces are higher than ideal.
30 Mar 06 --
large (50MB) PDF file of poster for SWRI April 4-5. The point is that we don't need
more adhesion, we need
controllable adhesion. The essential ingredients are:
- hierarchical compliance for conforming at centimeter, millimeter and micrometer scales,
- anisotropic dry adhesive materials and structures so that we can control adhesion by controlling shear,
- distributed active force control that works with compliance and anisotropy to achieve stability.
28 Mar 06 --
First climbing demo (80MB mp4). Overriding Mark's anxieties, Sangbae put Stickybot in an oven (40 deg C for 1/2 day) to accelerate curing of new "blue" toe sandwich pads (~1mm thick, with 300 micrometer cylinders). After recovering from a certain amount of oven-induced distortion, the linked video was produced. Sorry for large file size but you need to see the feet clearly. From the video it's clear that further improvements can be made in the gait and compliance tuning. Of course, directional friction pads and closed-loop control on the limbs (coming...) will help even more.
23 Mar 06 -- first successful operation in which Stickybot lifts and replaces 1 foot while keeping the remaining 3 attached on vertical glass, without external support. The glass is not particularly clean but there is extensive tweaking of trajectories for smoothness and load sharing. Smoothness is
crucial. Otherwise the some of the stuck feet become detached while the lifted foot is moving.
Meanwhile, we are iterating furiously on multi-layer compliant quasi-adhesive pads. The current ones have a "sandwich" construction with upper and lower "skin" layers and a matrix of little cylinders in between.
Previous Results
(reverse chron. order)
Stickybot lives, as of Winter 2006. As of March 5 2006 it moves, but it doesn't yet climb vertical glass surfaces (keeps popping itself off).
Moved the previous Stickybot toe work to
GeckoFootApril05
Stickybot (mostly) assembled on the bench:

Nov 1, 2005: Stickybot in the rough -- parts as embedded in sacrificial support layer:
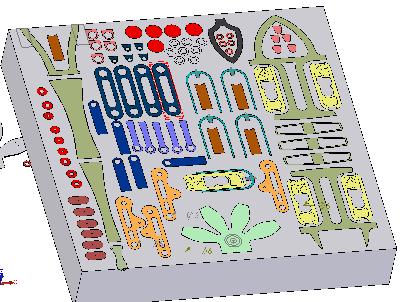
Stickybot parts and molds
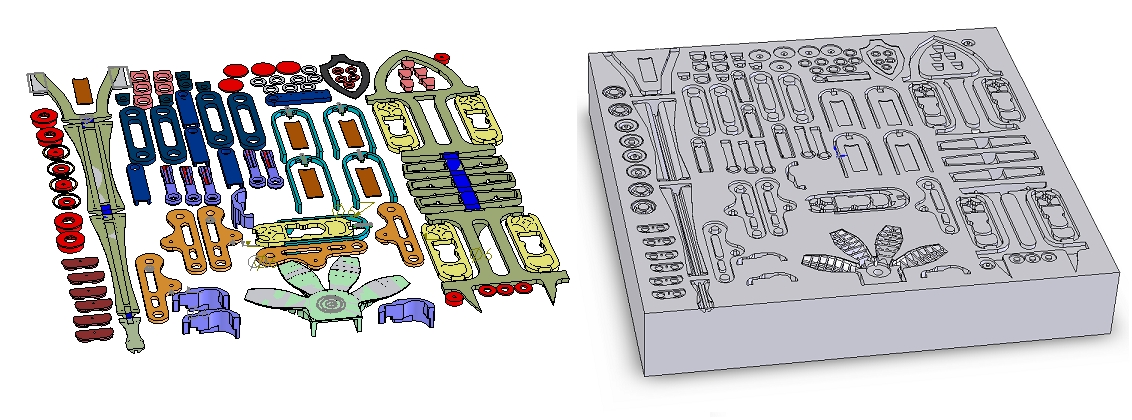
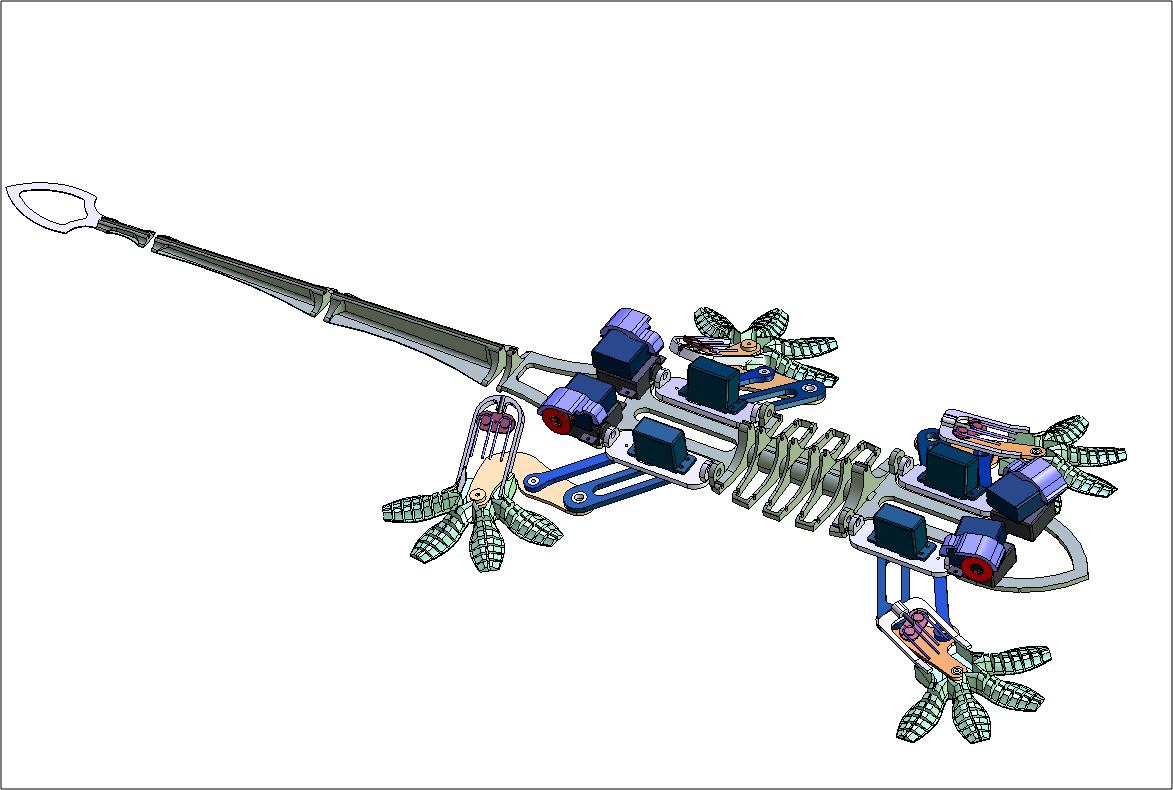
Solid model
 Barrett instructs Stickybot to climb over the force plate
Barrett instructs Stickybot to climb over the force plate