new web: http://bdml.stanford.edu/pmwiki
TWiki > RisePrivate Web>FootDesign? >GeckoFootApril05 (07 Aug 2006, MarkCutkosky)
RisePrivate Web>FootDesign? >GeckoFootApril05 (07 Aug 2006, MarkCutkosky)
Time for a new StickyBot page 19 Mar 2006 -mrc
-- SangbaeKim? - 11 Apr 2005
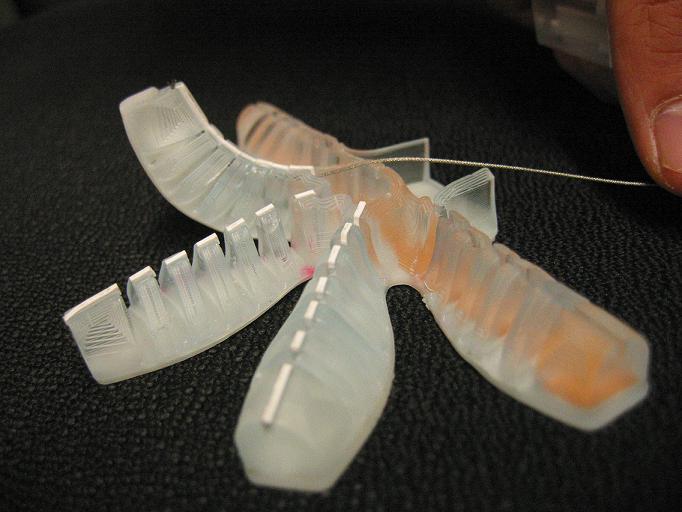
 The pictures of first prototype of geckofoot.
The pictures of first prototype of geckofoot.
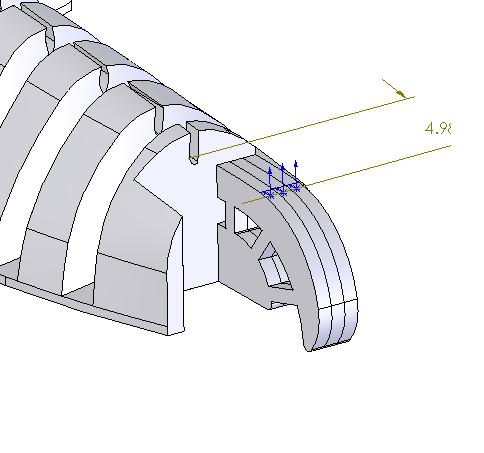
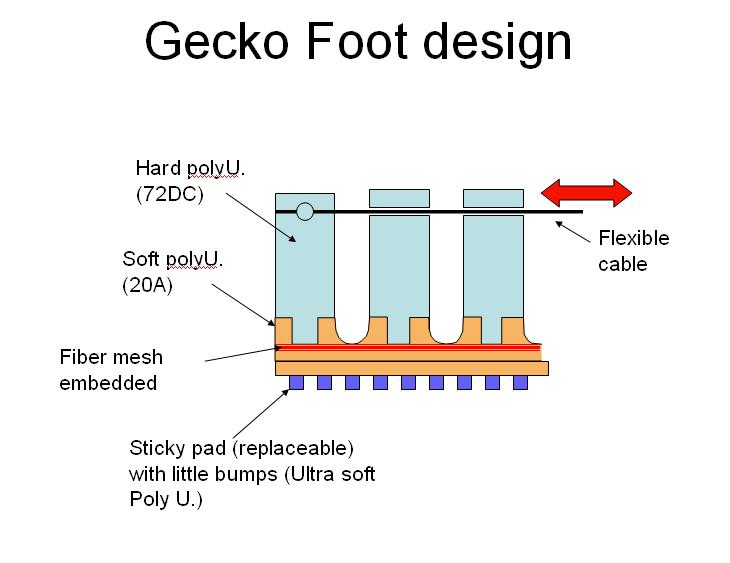
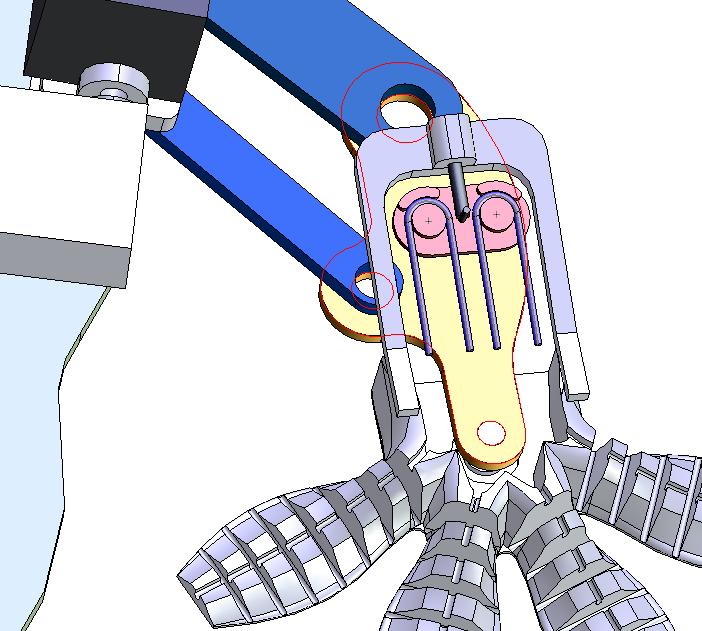
 Here is the crossection of the toe. In order to distribute the tangential load(parallel to the wall) better, fiber mesh has been imbedded reinforcing the joint location. For hard part, polyurethane 72DC was used and 20A polyurethane for soft part
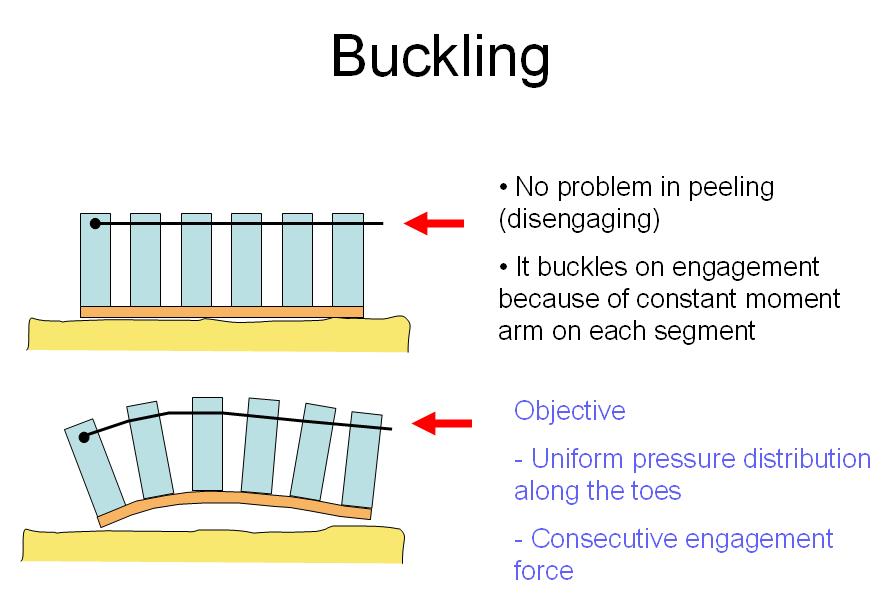
Since the current cable path is straight, all of the compression force of cable go to tip segment. This make the toe buckle even without generating normal force for egagement of each segment of toe
Here is the crossection of the toe. In order to distribute the tangential load(parallel to the wall) better, fiber mesh has been imbedded reinforcing the joint location. For hard part, polyurethane 72DC was used and 20A polyurethane for soft part
Since the current cable path is straight, all of the compression force of cable go to tip segment. This make the toe buckle even without generating normal force for egagement of each segment of toe
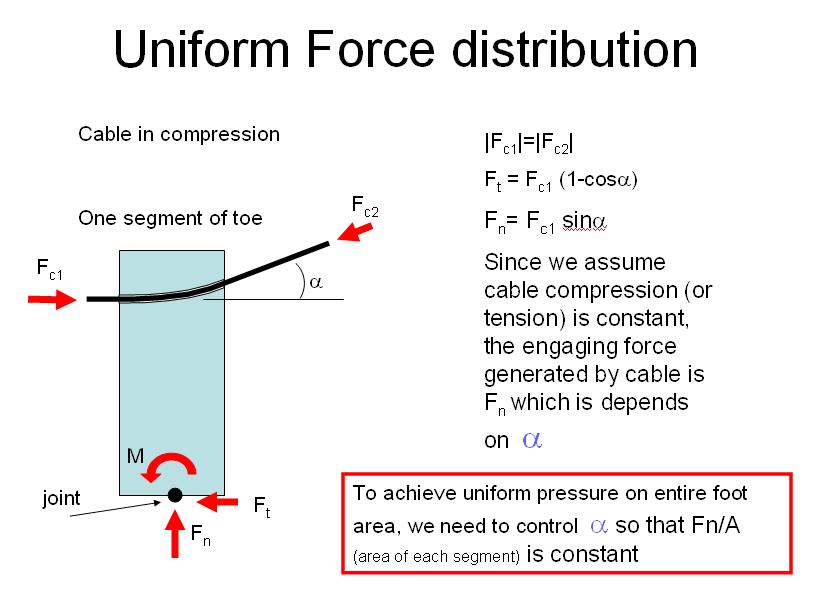 * geckofootquestion.txt: Email discussion about cable loading (catenary curve or not?) - MarkCutkosky
* geckofootquestion.txt: Email discussion about cable loading (catenary curve or not?) - MarkCutkosky

 Parts of the robot on wax block
Parts of the robot on wax block

Gecko Foot Development
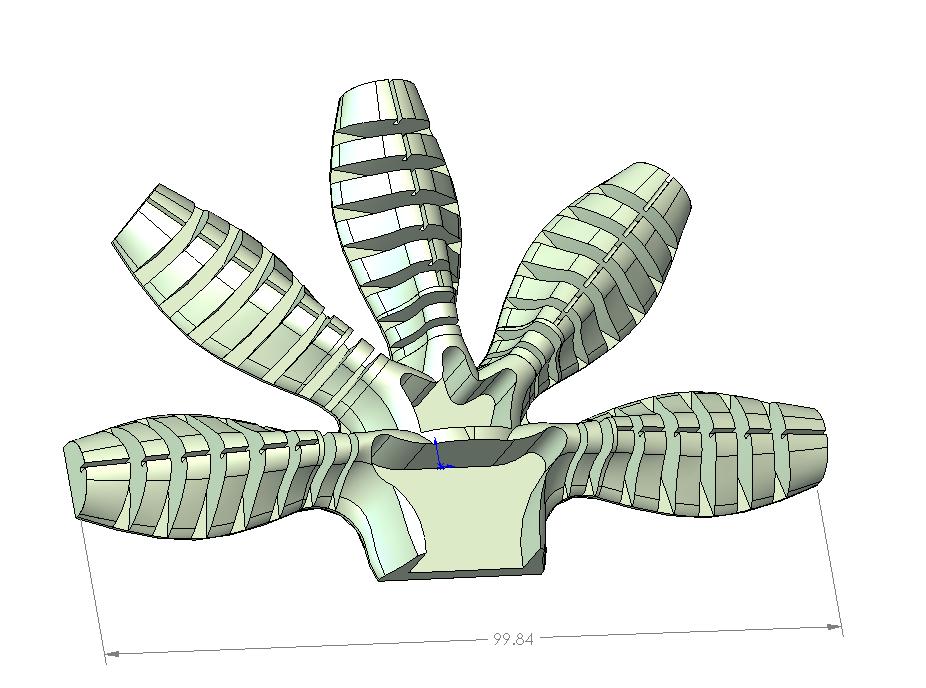
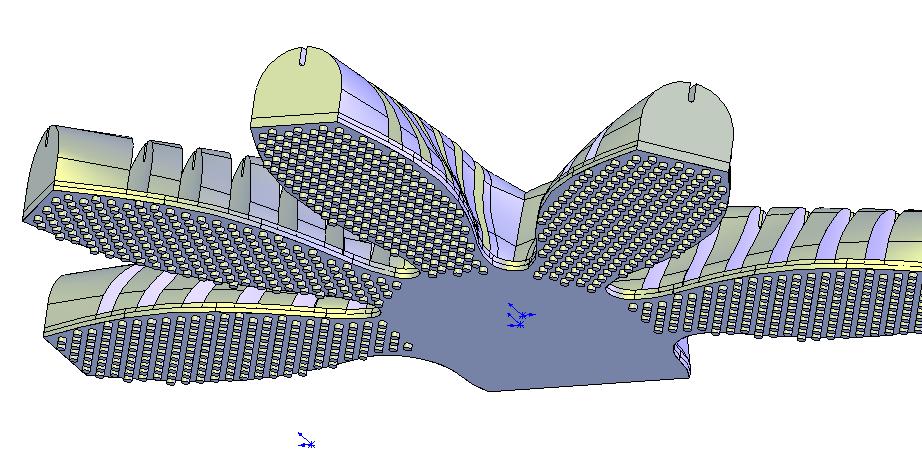
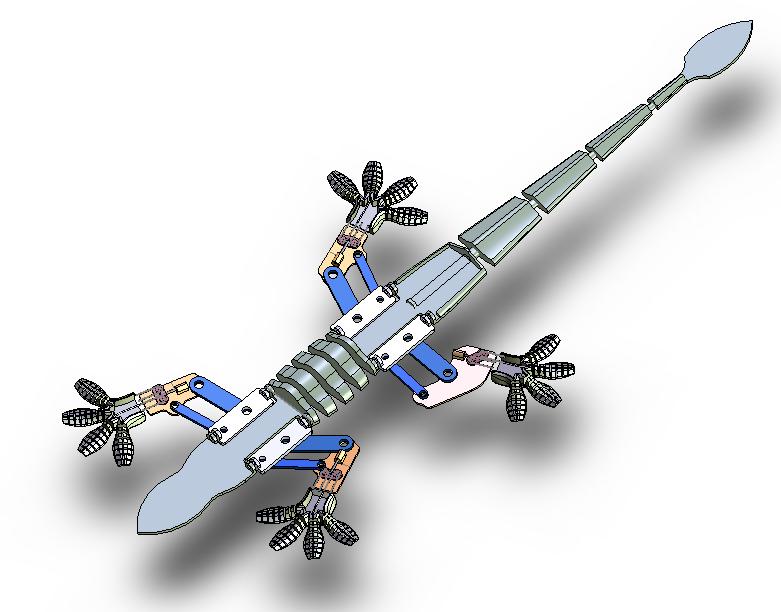
This is new Foot design for sticky bot. The design is inspired by gecko lizard. Realizing that we need active peeling motion for disengaging sticky pad, I concluded that finger shape is resonable initial concept of design. For the peeling and unpeeling motion, I employed underactuated mechanism which alows the toes conform surface better in conjection with hyrachical compliance structure. The limb design will cover 'cm' scale compliance and each toe motion cover mm scale. Therefore 100um scale and smaller compliance will be stiky pad. The bottomline question is how do we divide the roles of compliance in different scale. In other words, where should we draw a line between role of independant compliance and continous compliance role in the ruler. For example, we can make couple of humdred micro meter size independant bumps(hairs)that take care of 100 um scale compliance and rely on continous shape for smaller scale. We can do same thing in smaller scale or we can draw line twice so that the hair and two different layer. This is the solid model of Five toe foot design For climbing rough surfaces, we might need to integrate with micro spines at the tip of the toes.
The pictures of first prototype of geckofoot.
Here is the crossection of the toe. In order to distribute the tangential load(parallel to the wall) better, fiber mesh has been imbedded reinforcing the joint location. For hard part, polyurethane 72DC was used and 20A polyurethane for soft part
Since the current cable path is straight, all of the compression force of cable go to tip segment. This make the toe buckle even without generating normal force for egagement of each segment of toe
* geckofootquestion.txt: Email discussion about cable loading (catenary curve or not?) - MarkCutkosky
Version 2 with Body design
Click to see movie of Gecko feet
- geckofootv2.mov: soreno 3 compressor
- geckofoot.mp4 .mov: MP4 with differential mechanism
- stickybotrunning.mov: First test with Stickybot Running at 24cm/sec
Parts of the robot on wax block
SpinyBot Development
PICSensorFeedbackIdeas, requests, problems regarding TWiki? Send feedback