BDML Twitter, BDML YouTube, Lab News

BDML members on Halloween (in front of MERL October 2024)
Current Projects
{kind=link}
 |
Bioinspired Robots: We have developed many bioinspired robots over the years. Among the most recent is TadBot, a tadpole simulator for studying parenting dynamics in poison frogs. |
 |
Adhesion and Applications: Grasping and climbing vertical surfaces with gecko-inspired controllable, directional dry adhesives. Research includes crawling and climbing robots (and people), new adhesives and manufacturing methods, and new applications such as UAV perching, space junk grasping and manipulation in space. |
 |
Mobile Manipulation: Research includes underwater hand and grasp analysis and tactile sensing for hands and feet. |
 |
Medical Devices and Robotics: include instrumented tools and manipulators for MRI-guided interventions. Optical fibers with Bragg gratings provide measurement of dynamic forces and temperature. Other robotics work involves measuring forces and tissue slippage in robot-assisted surgery (RAS). Medical device design and modeling includes new compliant devices for the treatment of cardiomyopathy. |
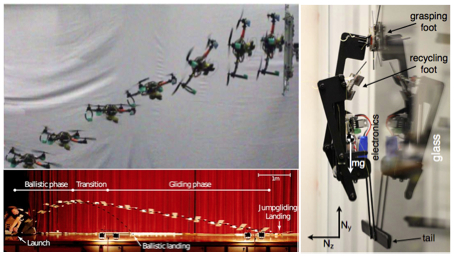 |
Multi-Modal Robots: Bio-inspired robots that can transition between various kinds of locomotion, from jumping to flying to climbing vertical walls using adhesives and microspines. This has grown out of our efforts in both Fixed Wing Perching and Quadrotor Perching, as well as our JumpGliding project. |
 |
Haptics included touch feedback for various applications including automotive car/driver communications and teleoperation in cluttered environments. Related previous work includes Wearable Haptics for altering dynamic motions such as jogging or walking (e.g. to reduce osteoarthritis) |
 |
Tunable compliance and damping: structures based on electroactive polymer actuators with electrically-tunable stiffness and damping properties for use in dynamic systems. Projects include control of damping through electrical boundary conditions and control of stiffness through design geometry and electrical activation as well as applications to the perching UAV. |
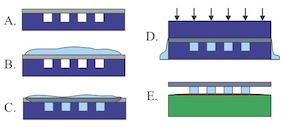 |
Manufacturing and Prototyping: manufacturing and prototyping methods are an important part of what we do for all our other projects. These pages collect information about some of the processes, equipment and materials we work with |
Previous Projects
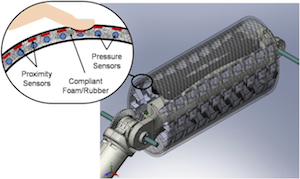 |
Human-safe and human-centered robotics: design tools and methods to mitigate impact damage during unintended human-robot interactions. Projects include collaboration with Prof. Oussama Khatib in the Computer Science Department on the Stanford Safety Robot, incorporation of capacitive skin sensors into robotic platforms for collision detection and post impact behaviors. |
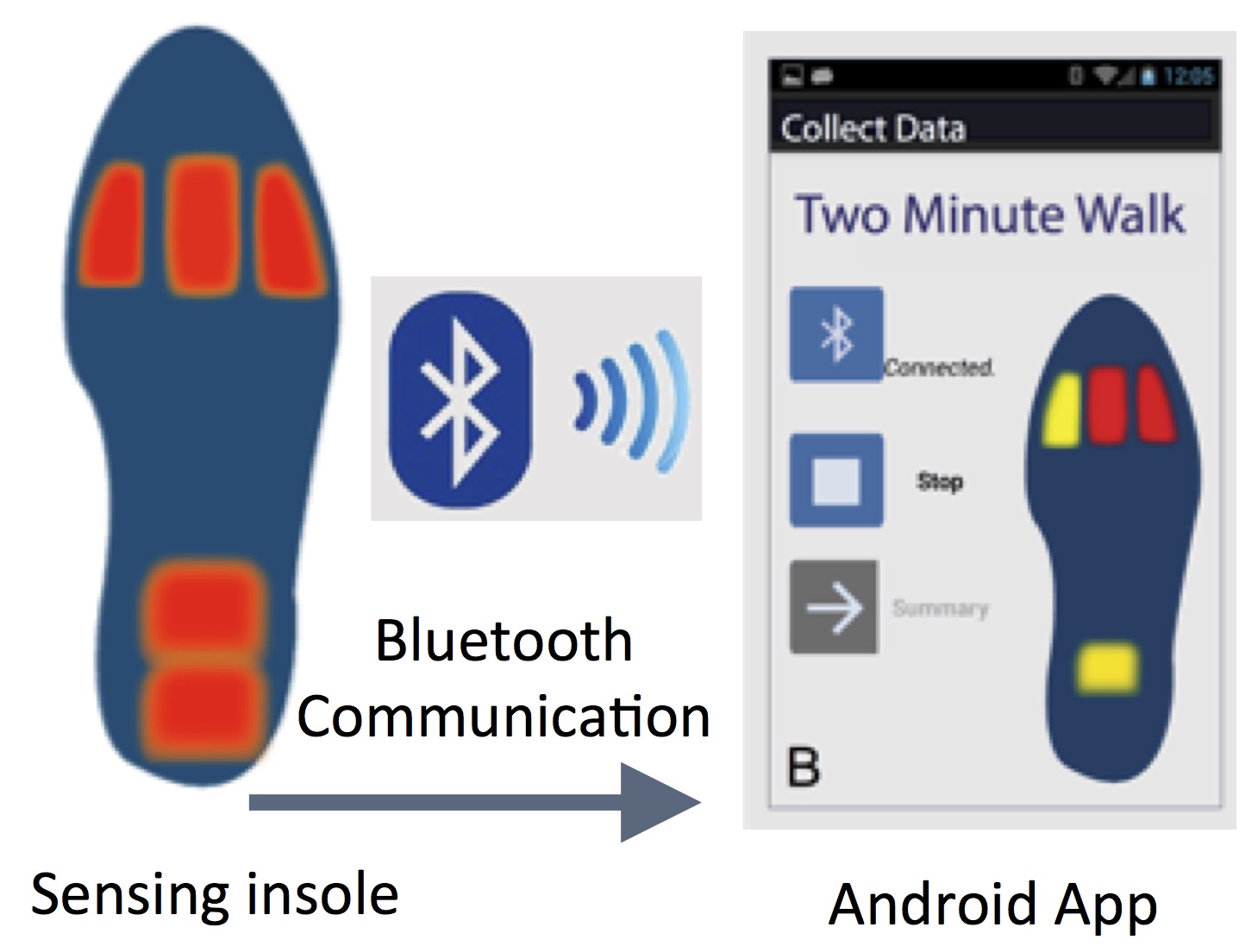 |
Stroke Rehabilitation: We seek to optimize metrics for stroke recovery and understand the effects of proprioceptive deficit and augmentation on motor control. We are currently designing experimentation to characterize the effects of sensory deficits on single-joint motor control and developing unobtrusive wearable devices to augment clinical functional tests and ultimately provide a take-home therapeutic device to improve functional outcomes. |
Older projects are described on the Previous BDML Wiki System