Introduction
Haptics is a relatively underexplored feedback modality in driving, as today�s cars mostly use visual and auditory cues when sending notifications to the driver. Haptics has the ability to communicate information quickly and intuitively, especially if it can tap into a reflex, without putting further load on the already heavily used visual and auditory sensory channels. The increasing autonomous functionality and advanced driver assistance systems of today's cars, as well as the loss of traditional road feel as vehicle mechanical components continue to be replaced by electrical systems, make increased driver-vehicle communication through haptic feedback an important area to explore.
In particular, lateral skin stretch is a promising form of haptic feedback because it conveys magnitude and direction information, creating a rich, analog haptic signal. Possible applications include:
- Safety systems such as collision avoidance, lane keeping, blind spot detection, and low traction warnings
- Navigation and trajectory planning
- Previews of autonomous car actions
- Driver training for trucks and heavy equipment
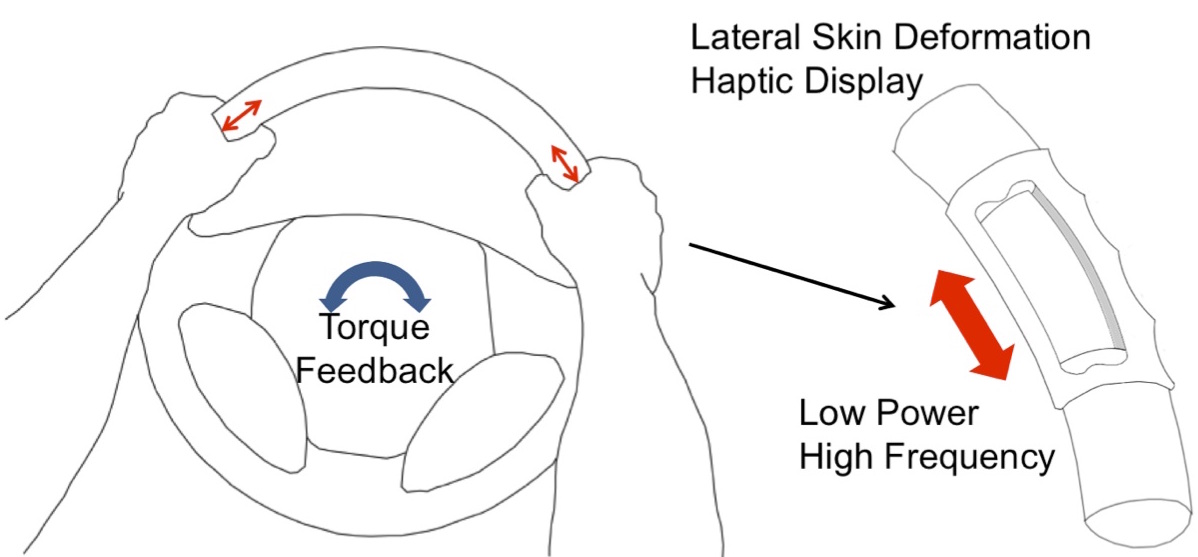
Conceptual image of skin stretch haptic display embedded into steering wheel. Red arrows indicate where the lateral skin stretch is felt. This can be in addition to larger hand wheel torque feedback (blue arrow).
Skin Stretch Steering Wheel Display
A skin stretch steering wheel display prototype was built by embedding a large thin section bearing into a steering wheel rim.

Skin stretch steering wheel display: ring at front of the rim showed highlighted in yellow can rotate �0.5 degrees, producing �2.5 mm of skin stretch, and can be gripped anywhere. Integrated motor is visible at the 5 o�clock position
The display produces lateral skin stretch in the driver's palms and possibly thumb pads depending on the grip, communicating direction and magnitude.
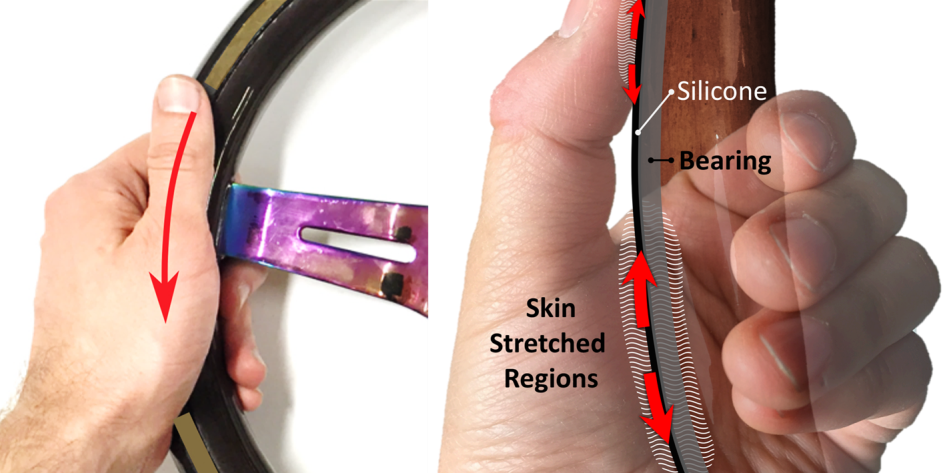
Close-up view of the skin stretch produced by the steering wheel.
Actuation is provided by a small DC motor and lead screw mechanism.
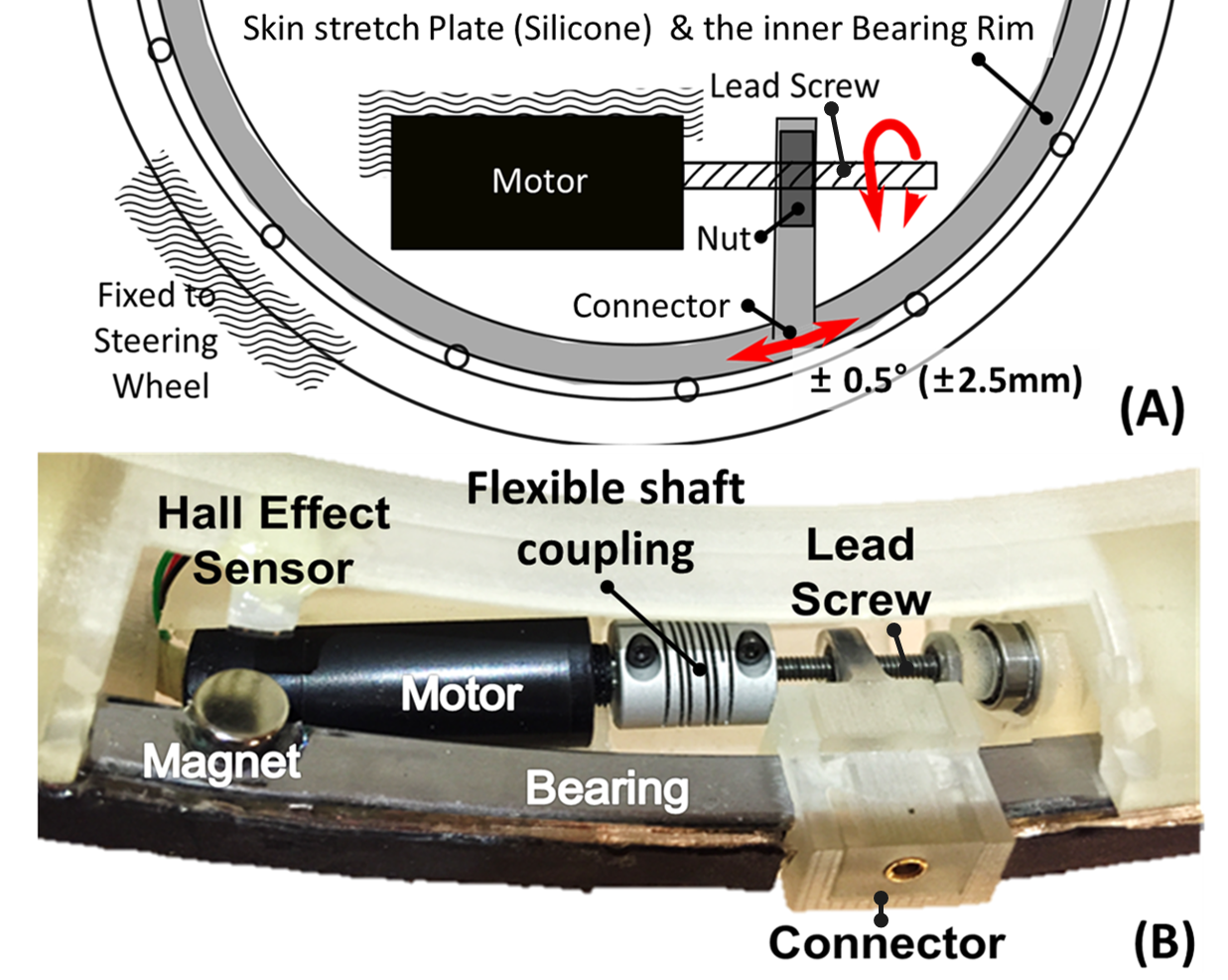
(A) A lead screw and nut are mounted to a 3D-printed connector, which is attached to the inner ring of the bearing to rotate it �0.5 degrees. (B) Close up view of the actuation and sensing elements, including motor and flexible shaft coupling.
Test Setup
A right-hand drive Jeep Wrangler was instrumented with the skin stretch steering wheel for testing on the road to produce a realistic haptic driving environment to run experiments in.
 Δ
ΔThe in-vehicle setup consists of the haptic wheel attached to the steering column, a clockspring to route the wiring, a laptop and microcontroller for the experimenter to control the haptic and audio cues and auditory N-back task, a camera system for data collection, and a 12 V battery to power the haptic motor.
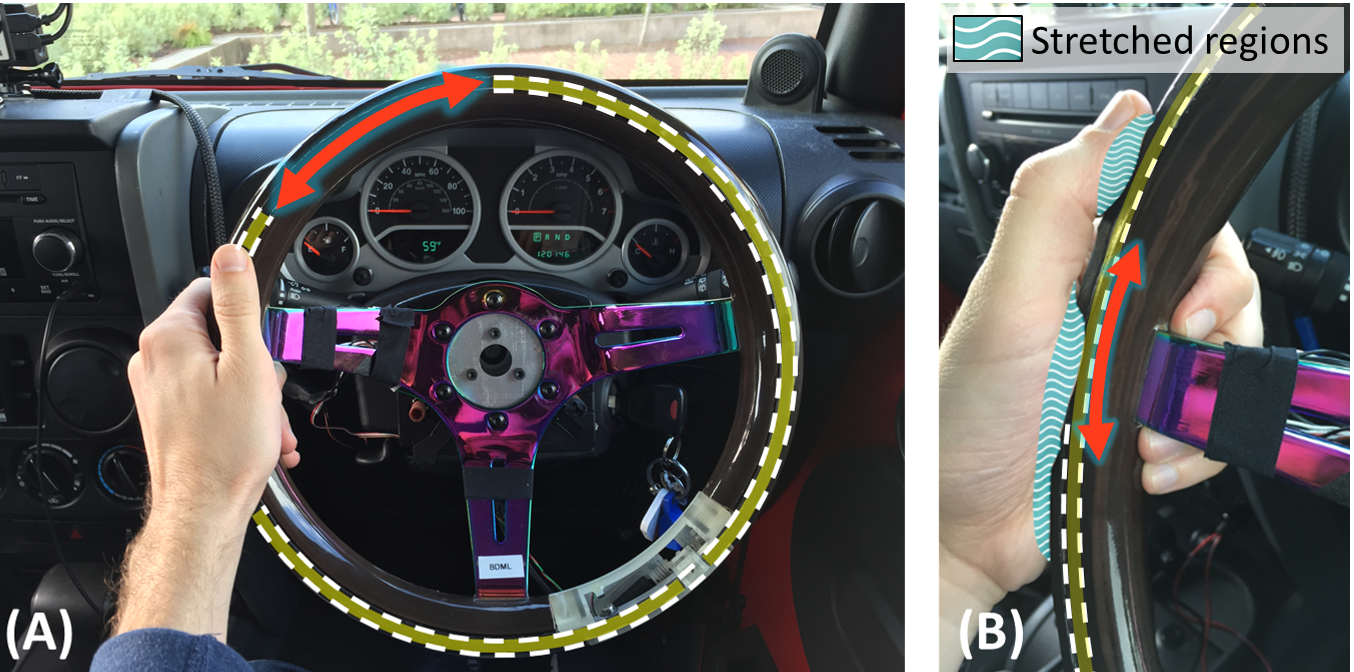
View of the skin stretch steering wheel in the Jeep.
The haptic cues tested have been directional pulses that quickly give an intuitive sense of a left or right stimulus to the driver.
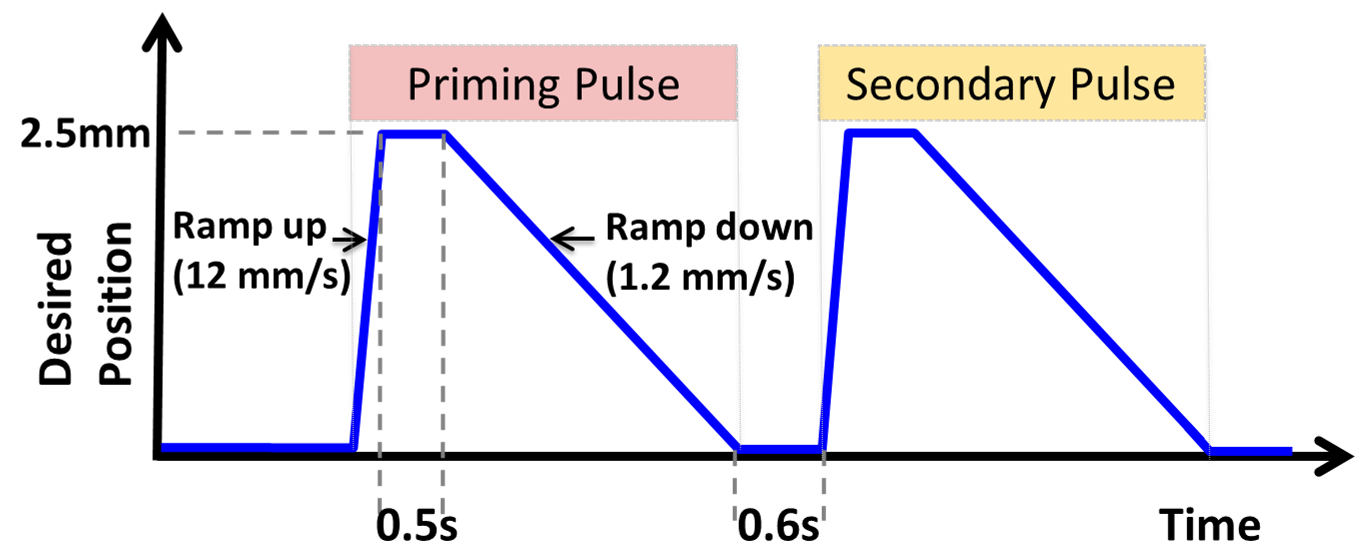
Haptic stimuli consist of directional pulses with a fast ramp up and a slow ramp down.
As skin stretch feedback is analog, a wide variety of other stimuli are possible.
Validation of On-Road Effectiveness of Skin Stretch Cues
On-road experiments were performed to determine the displacement and speed required to be felt in the car over road vibrations and noise. The direction identification accuracy data are given below, and show that stimuli of 2.5 mm and 4 mm/s are easily perceptible.
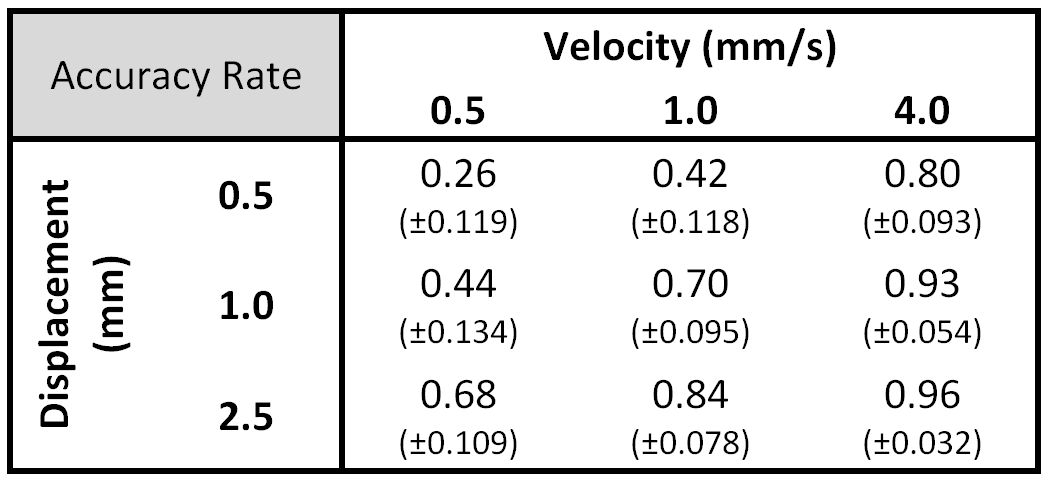
Direction identification accuracy rate with 95% confidence intervals in parentheses.
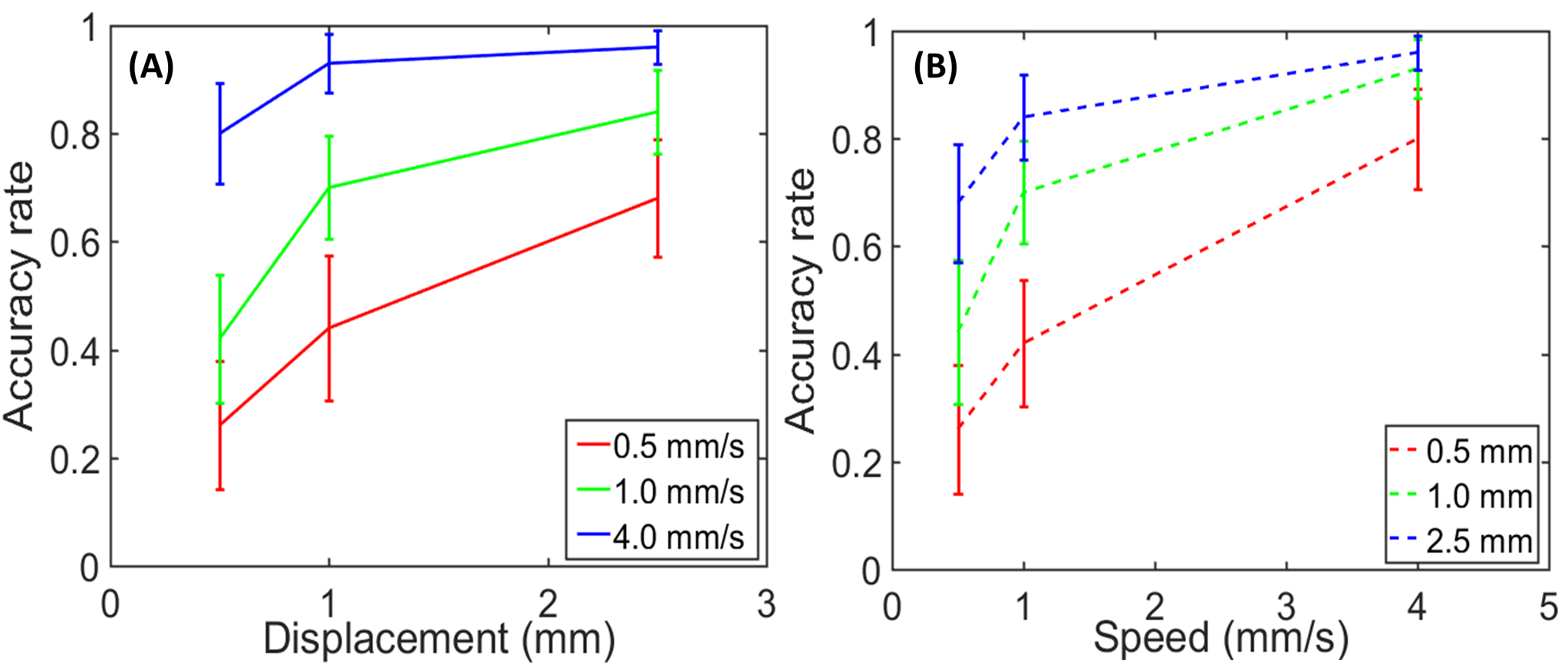
(A) Accuracy rate trends as a function of stimulus speed. (B) Accuracy rate trends as a function of stimulus displacement.
Subjects were able to distinguish between four different stimuli (a small and a large version of both the left and right directional pulses) reasonably well, showing that the magnitude of the stimulus is also useful information in the driving context.
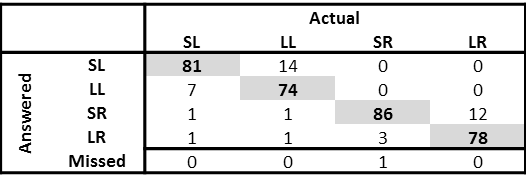
Confusion matrix, where SL corresponds with small left displacement, LL corresponds with large left displacement, SR corresponds with small right displacement, and LR corresponds with large right displacment.
The minimum threshold that could be detected in the car was found (0.26 mm for 2 mm/s pulses).
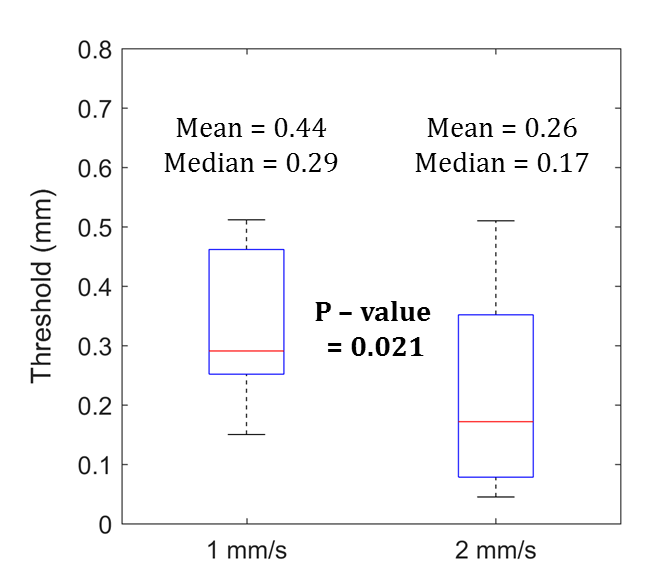
Absolute threshold of skin stretch required for detection for two different speeds of actuation.
Comparing Skin Stretch and Audio Cues with Driver Distraction
Skin stretch navigation cues were compared to audio while the driver was distracted by a secondary task (auditory N-back) simulating the cognitive and auditory loads of a phone call in an on-road experiment. Skin stretch was found to produce higher turn accuracy as well as be less distracting (better performance in N-back task).
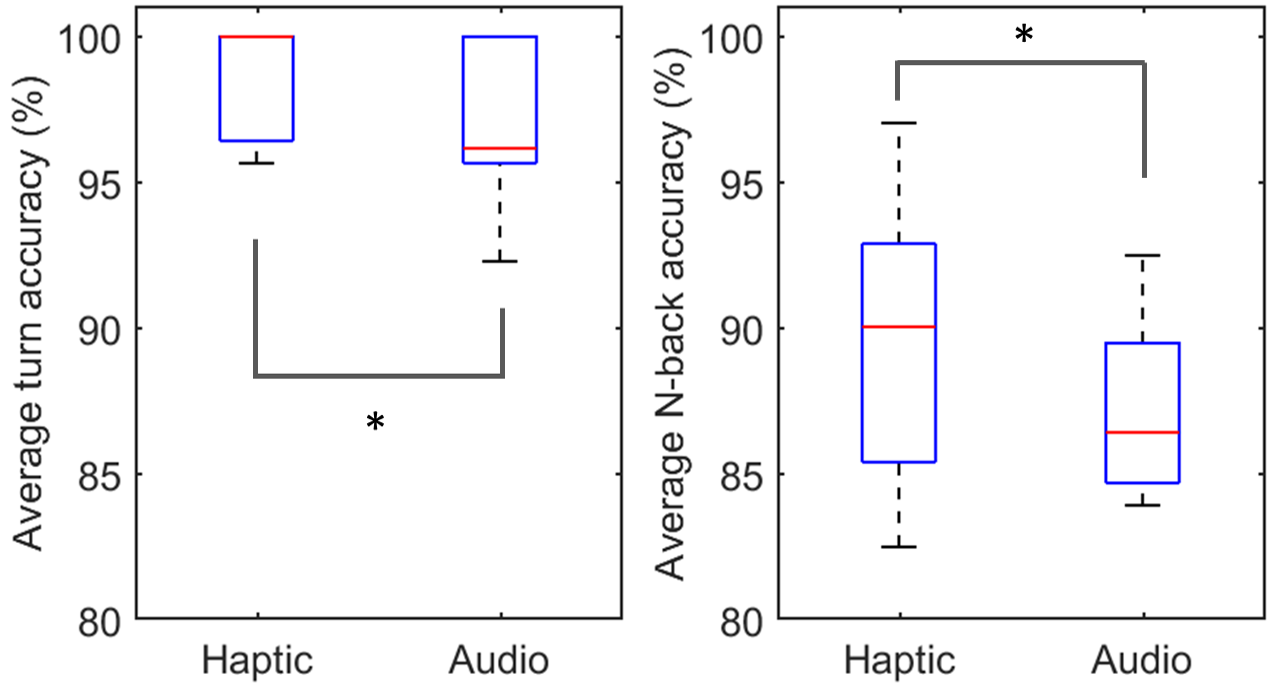
(A) Average turn accuracy for haptic and audio cases. (B) Average N-back accuracy for haptic and audio cases. Boxes represent the 25th to 75th percentile of the data, the line is the median, and the whiskers show the entire range. The asterisk indicates statistical significance with a 95% confidence level.
Publications
Ploch, C.J., "Augmenting human driving via steering wheel skin stretch haptics," PhD thesis 2019
Ploch, C.J., Bae, J.H., Ploch, C.C., Ju, W., Cutkosky, M.R., "Comparing Haptic and Audio Navigation Cues on the Road for Distracted Drivers with a Skin Stretch Steering Wheel," In proceedings of the 2017 IEEE World Haptics Conference (WHC 2017). Best Poster Paper Finalist, Best Poster Presentation Finalist. (preprint).
Ploch, C.J., Bae, J.H., Ju, W., Cutkosky, M.R., "Haptic Skin Stretch on a Steering Wheel for Displaying Preview Information in Autonomous Cars,", In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, Oct 9-14, 2016. Highlight Presentation.