Category: MedicalRobotics
On this page... (hide)
1. CERVA
Annie will put something here :-)
2. Electrohydraulic Cardiac Assistance
Electrohydraulic soft actuator is a popular kind of actuator. The working mechanism is that when a high voltage (<10 kV) to electrodes, they zip together due to electrostatic force and dielectric fluid between them is pushed out as in picture below. In this way, the overall length of the actuator decreases, while it can generate a pulling force.
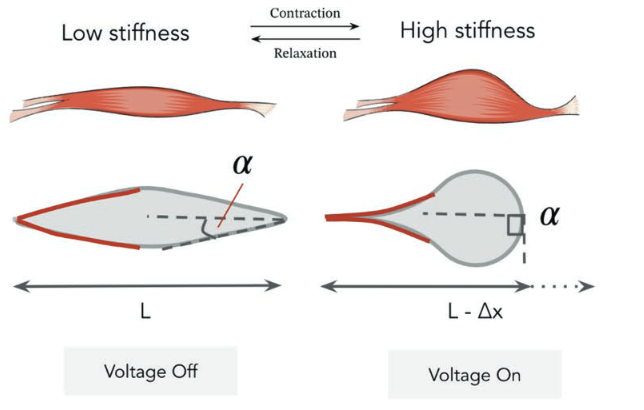
[-Figure from https://doi.org/10.1002/admt.202201196]
Our lab is interested in Electrohydraulic technology and we want to extend its use to cardiac support device. The first disease that we targeted on was heart failure. For heart failure, both left and right ventricles can fail, but most attention is put on the left side of the heart. We looked at the forgotten right ventricle. In order to facilitate heart pumping, we want to reduce the resistance that the heart is pumping against through counterpulsation. The Electrohydraulic actuator is wrapped around the pulmonary artery, contracts in diastole, and relaxes in systole to suck the blood from heart.
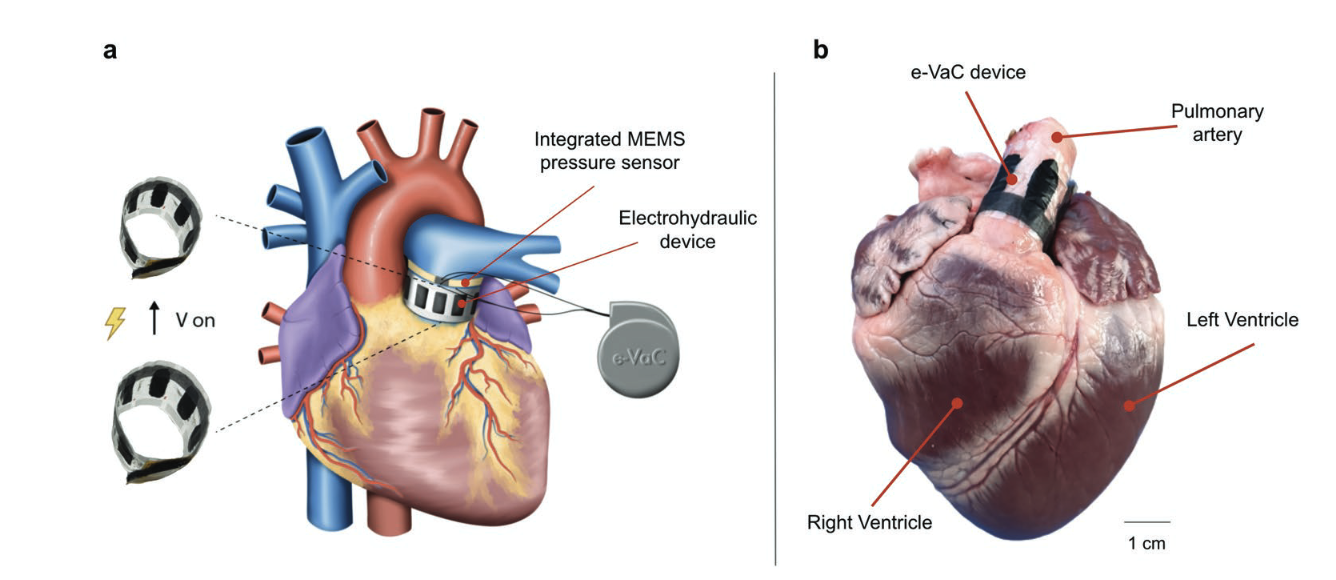
[-Figure from https://doi.org/10.1002/admt.202201196]
We also want to extend its application to single ventricle patient by creating a non-blood contacting pulsatile pump.
3. HLHS
Hypoplastic left heart syndrome (HLHS) is usually characterized by underdeveloped left ventricle as shown in picture below. HLHS is a severe congenital heart defect. There are several ways to enlarge the ventricle through pressure overloading, volume overloading, or stretching heart muscle fiber. In BDML, we are developing implantable devices that can provide controllable stretch force along fiber direction during diastole, while don't disturb any normal heart motion.
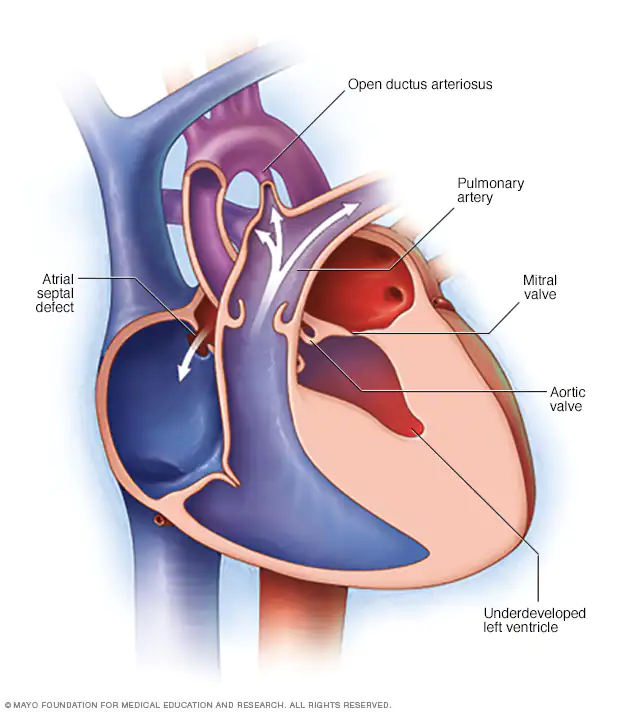
[-Figure from https://www.mayoclinic.org/diseases-conditions/hypoplastic-left-heart-syndrome/symptoms-causes/syc-20350599]
4. Intracardiac Medical Devices
The mechanical reinforcement of the ventricular wall and ventricular architecture after a myocardial infarction has been shown to modulate and attenuate negative remodeling that can lead to heart failure. Strategies include wraps, meshes, cardiac patches, or fluid-filled bladders. In the Cardiothoracic Surgical Devices section we describe projects centered around biomechanical optimization to guide design of novel devices to prevent heart failure.
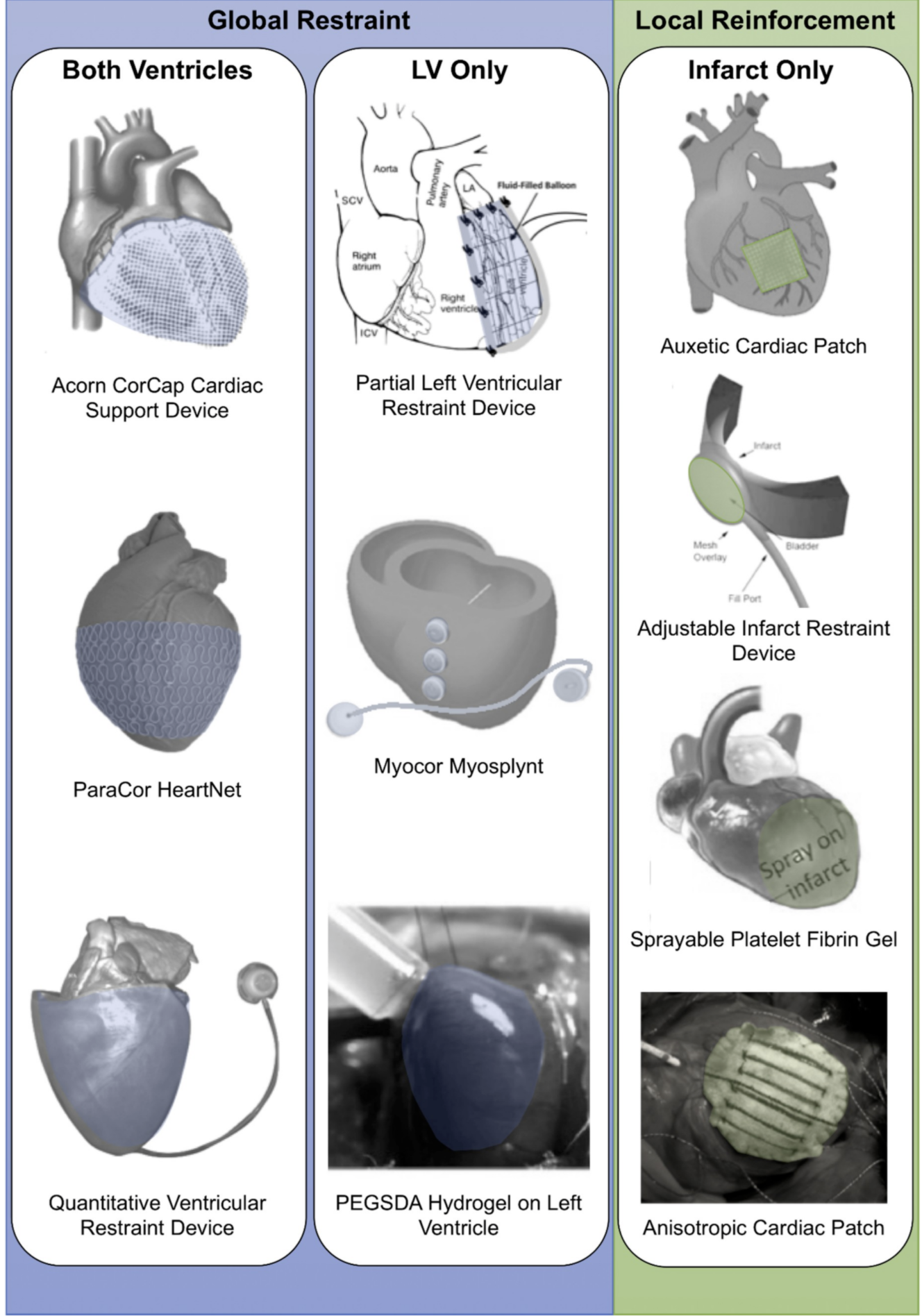
Figure adapted from Varela et al., 2019, https://www.mdpi.com/2313-7673/4/1/7
5. MR-Compatible Instrumented Tools
Optical fibers can be used to create MR-compatible tools such as biopsy needles for performing MR-guided interventions. For example, fiber Bragg grating (FBG) sensors are small (micron-scale), immune to electromagnetic interference, and can sense strains down to a pico-strain. They can be used to enhance minimally invasive image-guided procedures by sensing tool shapes, forces, and temperatures.
Needle deflections occur in almost all tissues.
5.1 Force sensing needle
A tip force sensing needle provides useful information during image-guided insertion of tools through various membranes during diagnostic and therapeutic procedures.
Configuration of force sensing needle
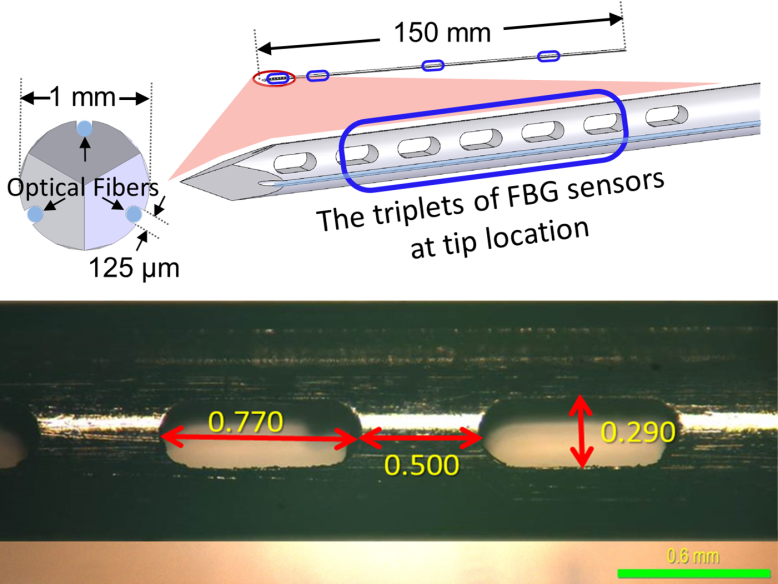
5.2 Shape sensing needle
A 3D shape-sensing needle allows interventional radiologists to know the trajectory and profile of their flexible tools in real-time, allowing manipulation of the tool towards its intended target.
5.3 MR-compatible passive manipulator
A passive master/slave manipulator enables remote trans-perineal needle placement into the prostate or other pelvic structures under direct MR guidance by a physician.
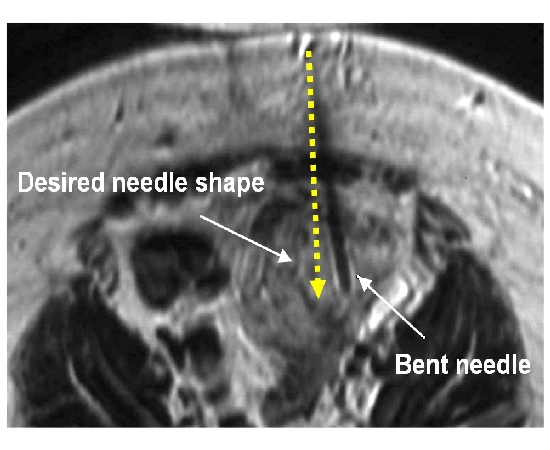
5.4 Steerable needle
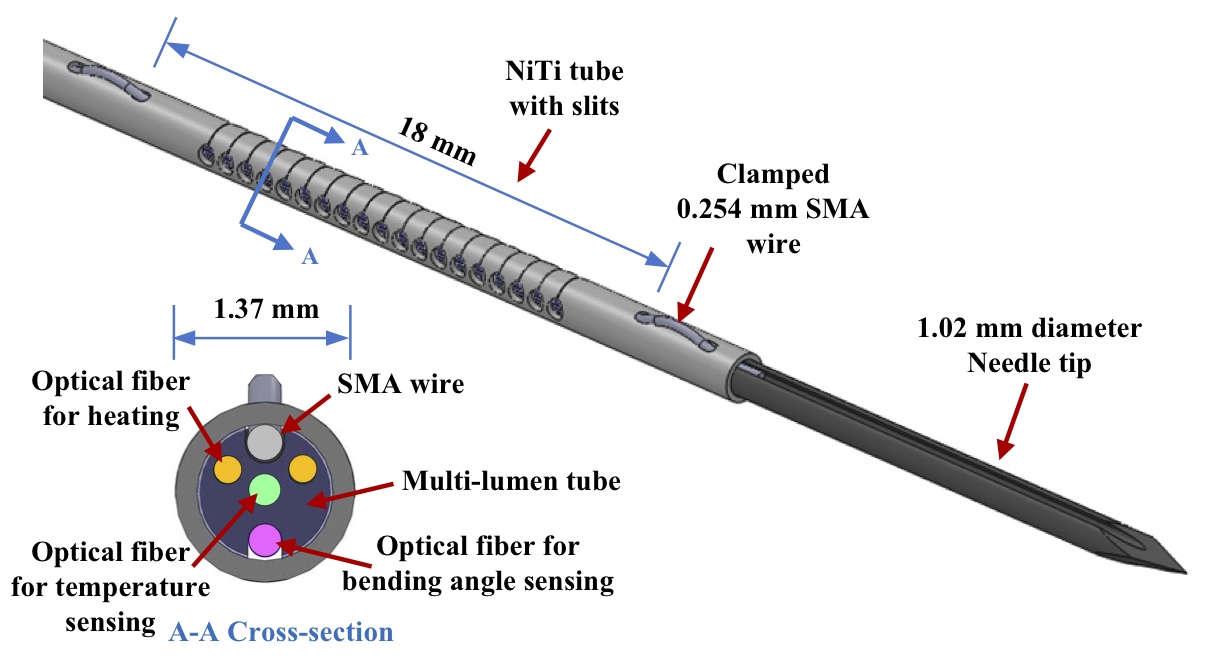
Active needle design with SMA actuator and flexible section
A steerable active needle provides the direct control capability of needle tip orientation, with which the needle effectively makes a detour to avoid prohibited areas or to follow a new trajectory. Optical actuation schemes make the needle MR-compatible, so that it can reduce the number of biopsy trials to reach a target precisely.
The active needle also includes optical sensors within the thin needle to measure its curvature and temperatue change for the closed loop control.
The target organ for this active needle is currently human prostate, stiffer than liver, and the needle's behavior will be investigated inside the fabricated tissue phantoms satisfying mechanical or thermal requirements.
6. Sensing for Robot-Assisted Surgery (RAS)
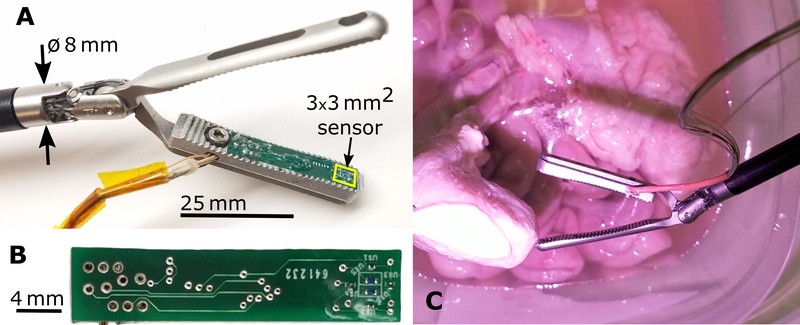
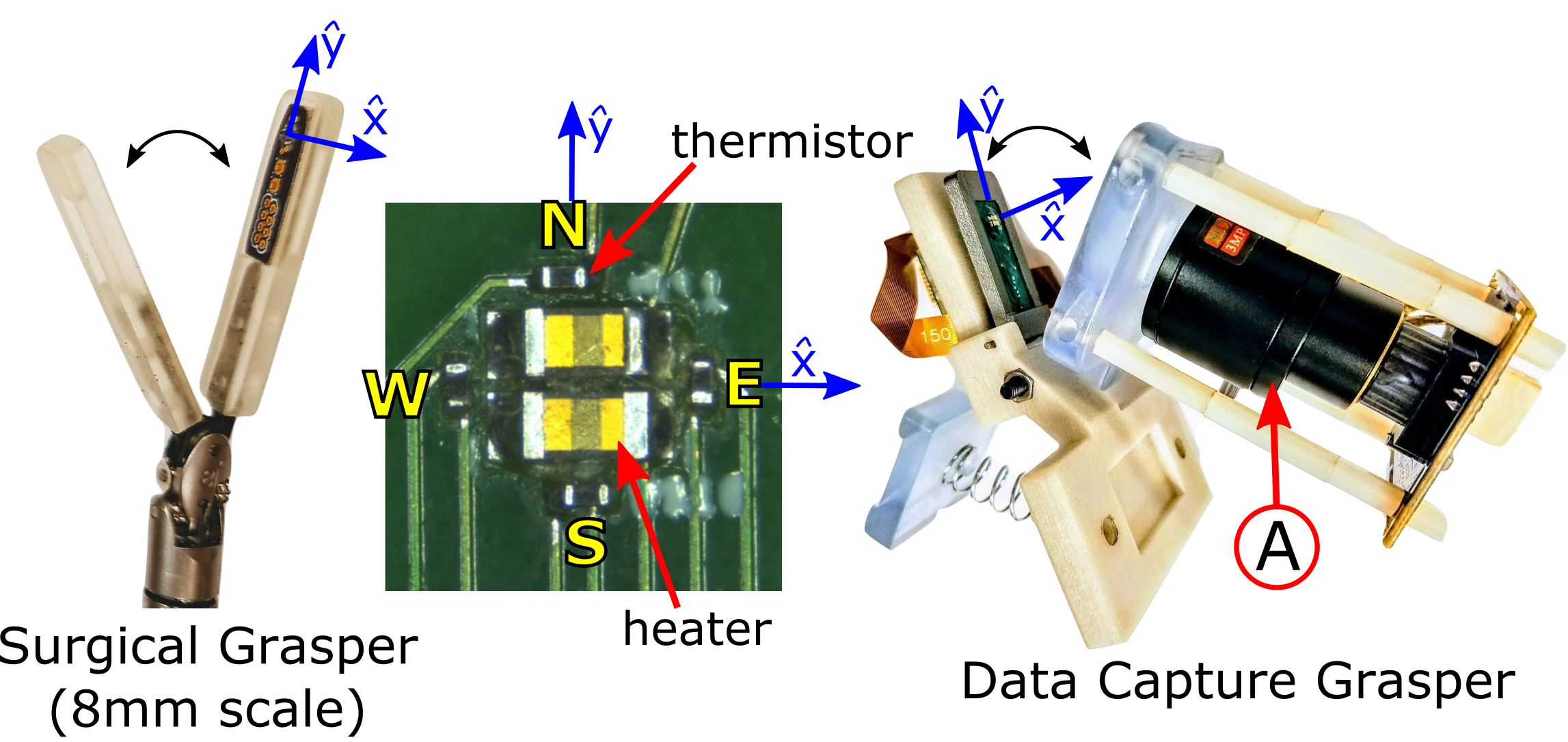
6.1 Instrumented tools: slip sensing
 | 
|
Grasping and manipulation of biological tissue are crucial processes during minimally invasive surgery (MIS). Surgeons attempt to maintain their view and control tissue position by tailoring their selection of grasper type to the given task and modulating the grasper jaws to provide just enough force to prevent tissue slip, but not so much that damage occurs. To enable atraumatic and reliable grasping, it would be useful to detect slip. Because the grasped object (biological tissue) is moist, conformable, and delicate, and because the sensor must work in a surgical environment, this application requires a departure from conventional slip sensing methods. For details see Burkhard, N.T., et al. (2019) below.
7. Recent Publications
(from MedicalRoboticsPublications)
Mascot, A., Doshi, S., Koch, R., Younis, R., Ke, W., Wagner, M., Calandra, R., and Cutkosky, M., "Visual Tactile Sensing for Minimally Invasive Palpation," DMD2026-1089, Proceedings of the 2026 Design of Medical Devices Conference, Minneapolis, MN. (Preprint)
Pirozzi, Ileana, Ali Kight, Amy Kyungwon Han, Mark R. Cutkosky, and Seraina A. Dual. "Circulatory Support: Artificial Muscles for the Future of Cardiovascular Assist Devices." Advanced Materials (2023): 2210713. https://doi.org/10.1002/adma.202210713
Kight, Ali, Ileana Pirozzi, Xinyi Liang, Doff B. McElhinney, Amy Kyungwon Han, Seraina A. Dual, and Mark Cutkosky. "Decoupling Transmission and Transduction for Improved Durability of Highly Stretchable, Soft Strain Sensing: Applications in Human Health Monitoring." Sensors 23, no. 4 (2023) https://doi.org/10.3390/s23041955
Pirozzi, Ileana, Ali Kight, XinYi Liang, Amy Kyungwon Han, Daniel B. Ennis, William Hiesinger, Seraina A. Dual, and Mark R. Cutkosky. "Electrohydraulic Vascular Compression Device (e‐VaC) with Integrated Sensing and Controls." Advanced Materials Technologies (2022): 2201196. https://doi.org/10.1002/admt.202201196
Pirozzi, Ileana, Ali Kight, Rohan A. Shad, Amy Kyungwon Han, Seraina A. Dual, Robyn Fong, Allison Jia, William Hiesinger, Paul Yock, and Mark Cutkosky. "RVEX: Right Ventricular External Device for Biomimetic Support and Monitoring of the Right Heart." Advanced Materials Technologies (2022): 2101472. https://doi.org/10.1002/admt.202101472
Pirozzi, Ileana, Ali Kight, Edgar Aranda-Michael, Rohan Shad, Yuanjia Zhu, Lewis K. Waldman, William Hiesinger, and Mark Cutkosky. "Cardiac Support for the Right Ventricle: Effects of Timing on Hemodynamics-Biomechanics Tradeoff." In International Conference on Functional Imaging and Modeling of the Heart, pp. 385-395. Springer, Cham, 2021. https://doi.org/10.1007/978-3-030-78710-3_37
Frishman, Samuel, Robert D. Ings, Vipul Sheth, Bruce L. Daniel, and Mark R. Cutkosky. "Extending Reach Inside the MRI Bore: a 7-DOF, Low-Friction, Hydrostatic Teleoperator." IEEE Transactions on Medical Robotics and Bionics (2021). DOI: 10.1109/TMRB.2021.3097123
Frishman, Samuel, et al. "Selectively Compliant Annuloplasty Ring to Enable Annular Dynamics in Mitral Valve Repair Evaluated by In-Vitro Stereovision." Frontiers in Biomedical Devices. Vol. 83549. ASME, 2020.
Paulsen, Michael J., Jung Hwa Bae, Annabel M. Imbrie-Moore, Hanjay Wang, Camille E. Hironaka, Justin M. Farry, Haley Lucian, Akshara D. Thakore, Mark R. Cutkosky, and Y. Joseph Woo. "Development and ex vivo validation of novel force-sensing neochordae for measuring chordae tendineae tension in the mitral valve apparatus using optical fibers with embedded Bragg gratings." Journal of biomechanical engineering 142, no. 1 (2020). https://doi.org/10.1115/1.4044142
Frishman, S., Kight, A., Pirozzi, I., Coffey, M.C., Daniel, B.L. and Cutkosky, M.R., "Enabling In-Bore MRI Guided Biopsies with Force Feedback," IEEE Transactions on Haptics (2020) 10.1109/TOH.2020.2967375
Burkhard, N.T., Steger, J.R. and Cutkosky, M.R., "The role of tissue slip feedback in robot-assisted surgery," ASME Journal of Medical Devices, 2019. doi:10.1115/1.4043018 (PDF).
Gruebele, A., Frishman S. and Cutkosky, M.R., "Long-stroke rolling diaphragm actuators for haptic display of forces in teleoperation," accepted for IEEE RA-Letters, 2019. (preprint)
Bae, J.H., Haptic Feedback System Design for MR-Guided Needle Intervention, Ph.D. thesis, Dept. of Mechanical Engineering, March 2018. (also at Stanford Libraries)
Burkhard, N.T., Sensing Slip of Grasped Biological Tissue in Minimally Invasive Surgery, Ph.D. thesis, Dept. of Mechanical Engineering, November 2018. (also at Stanford Libraries)
Lin, M. A., Siu, A. F., Bae, J., Cutkosky, M. R., Daniel, B. L., "HoloNeedle: Augmented Reality Guidance System for Needle Placement Investigating the Advantages of Three-Dimensional Needle Shape Reconstruction," IEEE RA-Letters, 2018; 3 (4): 4156�62
Burkhard, Natalie, Mark Cutkosky, and Ryan Steger. "Slip Sensing for Intelligent, Improved Grasping and Retraction in Robot-Assisted Surgery." IEEE Robotics and Automation Letters (2018). doi: 10.1109/LRA.2018.2863360. Available on IEEE.
Han, A.K.*, Bae, J.H.*, Gregoriou, K.C., Ploch, C.J., Goldman, R.E., Glover, G.H., Daniel, B.L. and Cutkosky, M.R., "MR-Compatible Haptic Display of Membrane Puncture in Robot-Assisted Needle Procedures," IEEE Transactions on Haptics (2018). Available as Early Access
Elayaperumal, S., Renaud, P., Cutkosky, M.R., Daniel, B.L.,"A Passive Parallel Master-Slave Mechanism for MRI-Guided Interventions,",Journal of Medical Devices, ASME,2014, DOI 10.1115/1.4028944
Elayaperumal, S., Plata, J.C. Holbrook, A.B., Park, Y-L, Butts Pauly, K., Daniel, B.L., Cutkosky, M.R.,"Autonomous real-time interventional scan plane control with a 3-D shape-sensing needle,",IEEE Transactions on Medical Imaging, vol.33, issue 11, pp.2128 - 2139, Nov. 2014, DOI 10.1109/TMI.2014.2332354
Park, YL; Elayaperumal, S.; Daniel, B.; Ryu, SC; Shin, M; Savall, J.; Black, R.J.; Moslehi, B.; Cutkosky, M.R., �Real-Time Estimation of Three-Dimensional Needle Shape and Deflection for MRI-Guided Interventions,� Mechatronics, IEEE/ASME Transactions on , vol.15, no.6, pp.906-915, Dec. 2010
Ryu, S., Fan Quek, Z., Koh, J-S, Renaud, P., Black, R.J., Moslehi, B., Daniel, B., Cho, K-J and Cutkosky, M.R., "Design of an Optically Controlled MR-compatible Active Needle," accepted for ,IEEE Transactions on Robotics (2015)
Bae, J.H.*, Han, A.K.*, Ploch, C.J., Daniel, B.L., Cutkosky, M.R., "Haptic feedback of membrane puncture with an MR-compatible instrumented needle and electroactive polymer display," In Proceedings of the 2017 IEEE World Haptics Conference (WHC 2017). Best Paper and Best Presentation Finalist
Bae, J.H., Ploch, C., Yang, M.A., Daniel, B.L., and Cutkosky, M.R., "Display of Needle Tip Contact Forces for Steering Guidance," Haptics Symposium 2016 IEEE, 332-337.
Burkhard, Natalie, Ryan Steger, and Mark Cutkosky. "Sensing slip of grasped wet, conformable objects." Intelligent Robots and Systems (IROS), 2017 IEEE/RSJ International Conference on. IEEE, 2017. (paper).
Burkhard, N., Frishman, S., Gruebele, A., Whitney, J.P., Goldman, R., Daniel, B.L., Cutkosky, M.R., "A rolling-diaphragm hydrostatic transmission for remote MR-guided needle insertion," IEEE ICRA 2017 (pdf). Best Robotics Paper Finalist
Elayaperumal, S., Bae, J.H., Daniel, B.L. and Cutkosky, M.R.,"Detection of Membrane Puncture with Haptic Feedback using a Tip-Force Sensing Needle," IROS,2014,vol.,no.,pp.3975 - 3981,14-18 Sept. 2014 doi:10.1109/IROS.2014.6943121
Elayaperumal, S.; Bae, J.H.; Christensen, D.; Cutkosky, M.R.; Daniel, B.L.; Black, R.J.; Costa, J.M.; Faridian, F.; Moslehi, B., "Mr-compatible biopsy needle with enhanced tip force sensing," World Haptics Conference (WHC), 2013 , vol., no., pp.109,114, 14-17 April 2013 doi: 10.1109/WHC.2013.6548393
Lin, M.A., Bae, J.H., Srinivasan, S., Perkins, S.L., Leuze, C., Hargreaves, B., Cutkosky, M.R., Daniel, B.L., �MRI-guided Needle Biopsy using Augmented Reality,� to be presented at International Society for Magnetic Resonance in Medicine 25th Annual Meeting and Exhibition (ISMRM 2017) (preprint).
Y-L. Park, S. Elayaperumal, S. Ryu, B. Daniel, R. J. Black, B. Moslehi, and M. R. Cutkosky. �MRI-compatible Haptics: Strain sensing for real-time estimation of three dimensional needle deflection in MRI environments", International Society for Magnetic Resonance in Medicine (ISMRM) 17th Scientific Meeting and Exhibition, Honolulu, Hawaii, April 18-24, 2009
Y-L. Park, S. Elayaperumal, B.L. Daniel, E. Kaye, K.B. Pauly, R.J. Black, and M.R. Cutkosky, �MRI-compatible Haptics: Feasibility of using optical fiber Bragg grating strain-sensors to detect deflection of needles in an MRI environment�, International Society for Magnetic Resonance in Medicine (ISMRM) 2008, 16th Scientific Meeting and Exhibition, Toronto, Canada, May 2008
S. Ryu, Z. F. Quek, P. Renaud, R. J. Black, B. Daniel, and M. R. Cutkosky. "An Optical Actuation System and Curvature Sensor for a MR-compatible Active Needle," IEEE International Conference on Robotics and Automation (ICRA), St. Paul, Minnesota, May 14-18, 2012
S. Ryu, P. Renaud, R. J. Black, B. Daniel, and M. R. Cutkosky. �Feasibility Study of an Optically Actuated MR-compatible Active Needle," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, California, September 25-30, 2011