On this page... (hide)
1. Vision for Tunable Impedance
Animals can vary joint impedance via co-contraction of antagonistic muscles acting at a joint, tuning the joint for a particular task. Cyclic motions, such as running and hopping, and other tasks, such as moving an arm, catching a ball, or landing from a jump, see advantages such as lowered metabolic costs, lowered impact forces, and improved dynamic stability. While researchers have created a range of robotic systems with tuned impedance, such as the Sprawl, Stickybot, and Perching robots, they cannot change their impedance after manufacture. Tunable stiffness devices have been designed, but are often heavy, bulky, mechanically complex, and inefficient, making them unsuitable for small, mobile platforms. We are designing structures based on electroactive polymers that are lightweight and simple and can change their stiffness and damping properties very quickly.
2. Tunable Damping
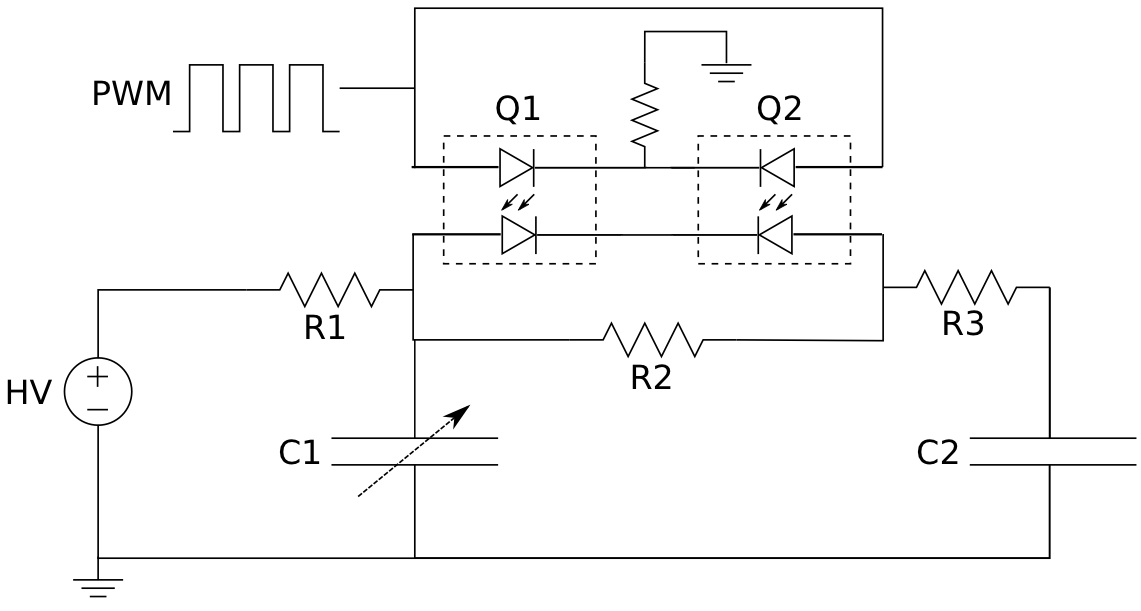
Changing the electrical boundary conditions around an EAP can influence the coupling between mechanical and electrical work. A sample circuit, such as the one shown below, can use high-voltage optocouplers to switch the electrical boundary condition on the actuator. This changes the rate at which charge moves on and off the actuator, which changes the effective damping.
3. Tunable Spring
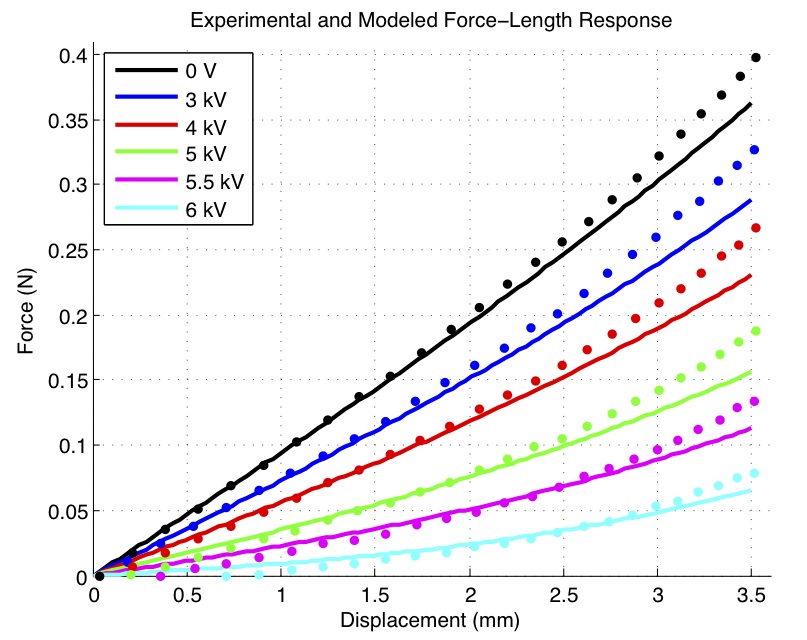
The geometry of the actuator frame can be designed to convert the film's relaxation due to applied voltage into a change in device stiffness. The actuator design also linearizes the viscoelastic response of the acrylic film, resulting in fewer losses due to damping and increasing the bandwidth of the device.
4. Applications to Perching
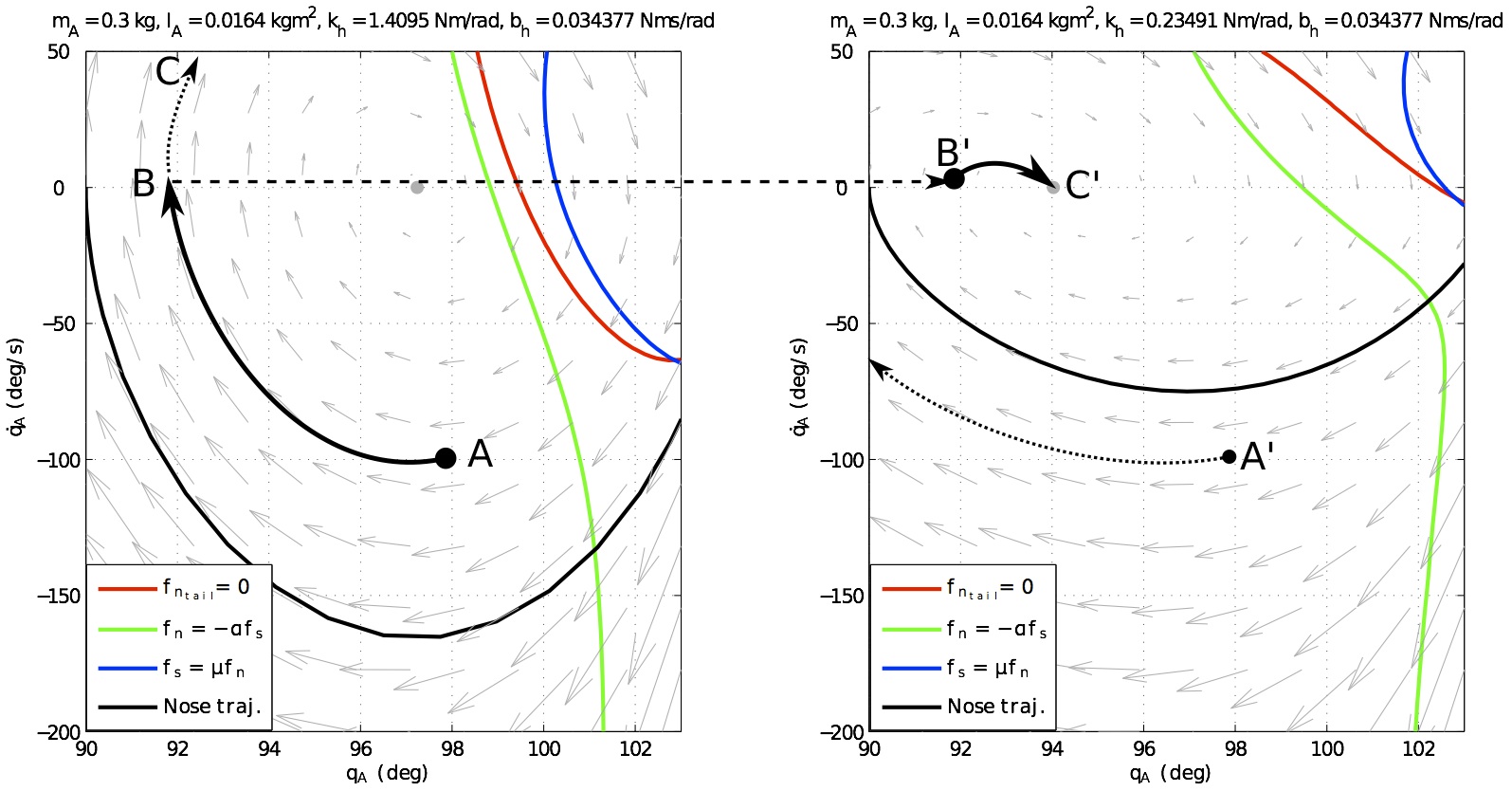
The perching UAV relies on a carefully tuned suspension to absorb landing energy, correctly load the spines, and stay within displacement and force limits. These limits, if exceeded, can cause suspension damage or an unsuccessful landing. The two regions of attraction shown here are for different suspension stiffnesses, and different failure limits are shown with the colored lines. Initial conditions at A', with low stiffness, results in landing failure. Starting at A, with high stiffness, leads to B. With no change in stiffness, B leads to C, eventually resulting in landing failure. However, changing from high to low stiffness, or B to B', leads to C', a successful landing.
5. Publications
(from TunableImpedancePublications)
Han, A.K., Wang, S., Bae, J.H., Christensen, D.L., and Cutkosky, M.R., "Toward MR-Compatible Needle Tip Force Display using EAP Actuation," Haptics Symposium 2016 (preprint).
Sanjay Dastoor and M.R. Cutkosky,"Variable Impedance due to Electromechanical Coupling in Electroactive Polymer Actuators", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, California, September 25-30, 2011.
Sanjay Dastoor and M.R. Cutkosky, "Design of Dielectric Electroactive Polymers for a Compact and Scalable Variable Stiffness Device," IEEE International Conference on Robotics and Automation (ICRA), Minneapolis, MN, May 14-18, 2012.
Sanjay Dastoor, Sam Weiss, Hannah Stuart and Mark Cutkosky, "Jumping robot with a tunable suspension based on artificial muscles," proc. Living Machines 2012, Barcelona, 9-12 July 2012.
6. What's New?
- 15 Sept 2011 - Submitted paper on new tunable spring to IEEE-ICRA 2012
- 26 Sept 2011 - Presented tunable damping circuit at IEEE-IROS 2011
- FE Modelling of Annular EAP
7. Links
- References from ICRA2011 Workshop
- (Private) Honda.HomePage -- A new project with Honda Research to investigate variable stiffness power transmission.