Categories: MultiModal Perching
On this page... (hide)
- 1. Multi-Modal Robots
- 1.1 Videos
- 1.2 SCAMP
- 1.3 Klingon
- 1.4 Dynamic Quadrotor Perching
- 1.5 Jumpgliding
- 1.6 Fixed-wing Perching
- 1.7 Multimodal Robots in the News
1. Multi-Modal Robots
As advances in computation and manufacturing allow us to manufacture capable robots on smaller and smaller scales, it becomes attractive to consider taking advantage of multiple modes of transportation.
Fundamental scaling laws tend to increase the ratio of surface area to volume as size decreases, meaning that smaller robots (even primarily terrestrial ones) can interact meaningfully with the air - something we take advantage of when jumpgliding. Similar scaling laws make smaller robots more robust to impacts, more capable of rapid orientation changes, and able to achieve higher adhesive forces relative to their size - making perching more achievable as size decreases.
1.1 Videos
- Perching Recovery at Stanford
- Perching at UPenn - collaboration with GRASP lab.
- Summary of perching work at UPenn and UMD
- Perching outdoors using microspines
- Testing mechanism on UPenn Hummingbird with the ADEPT robot arm
- Early perching experiments at UMD
1.2 SCAMP
(from SCAMP)
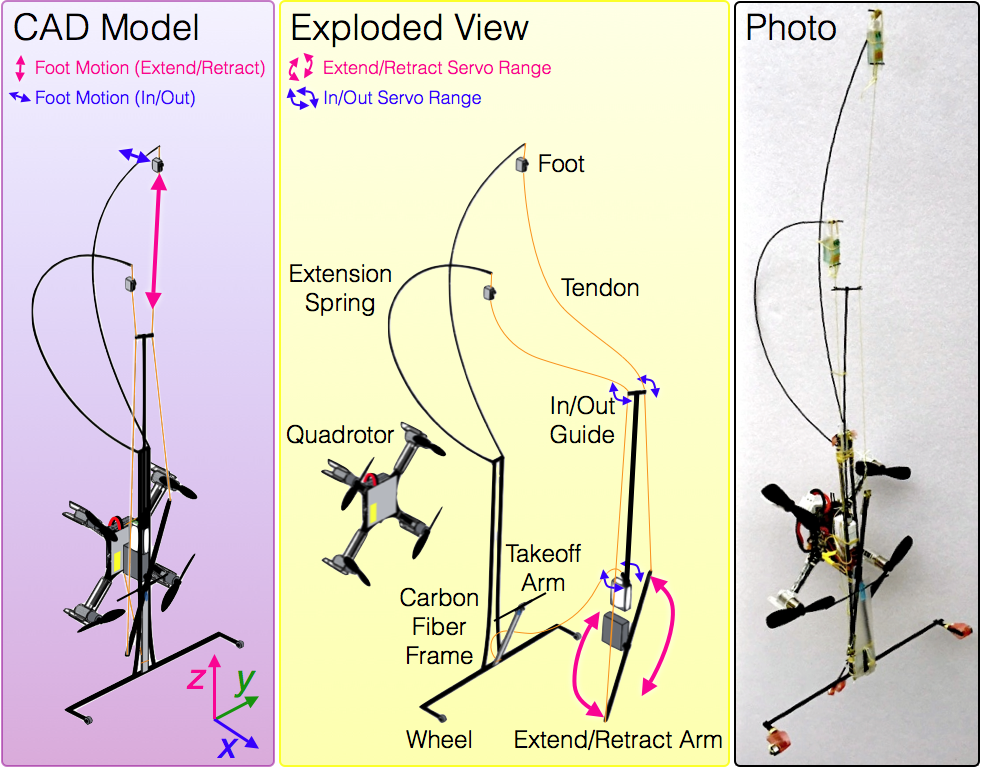
Combining flight with the ability to climb is an idea that's at least as old as Archaeopteryx, but one that artificial systems have only now been able to achieve. The Stanford Climbing and Aerial Maneuvering Platform, or SCAMP, is the first robot that's able to fly, passively perch, climb, and take off. It operates outdoors on rough surfaces like concrete and stucco, using only onboard sensing and computation. In this video, we show off some of SCAMP's features, including new ones unique to its hybrid capabilities, like automatic recovery from climbing failure through timely application of rotor thrust.
(:youtube bAhLW1eq8eM width=560 height=315 scale=1 fs=1 hd=1 nocookie=1:)
 |
 |
|
SCAMP climbing the Stanford Clocktower |
CAD model of SCAMP with exploded view and photo of robot. |
Perching can keep a quadrotor aloft indefinitely on a single charge; climbing allows us to precisely maneuver to the perfect spot for data gathering or communication. Making SCAMP required learning from all of our previous climbing robots and flipping our previous perching strategy on its head - literally. The result is a robot that's part woodpecker, part Daddy long-legs, and part hummingbird - the newest member of the BDML family of bio-inspired robots.
 |
 |
|
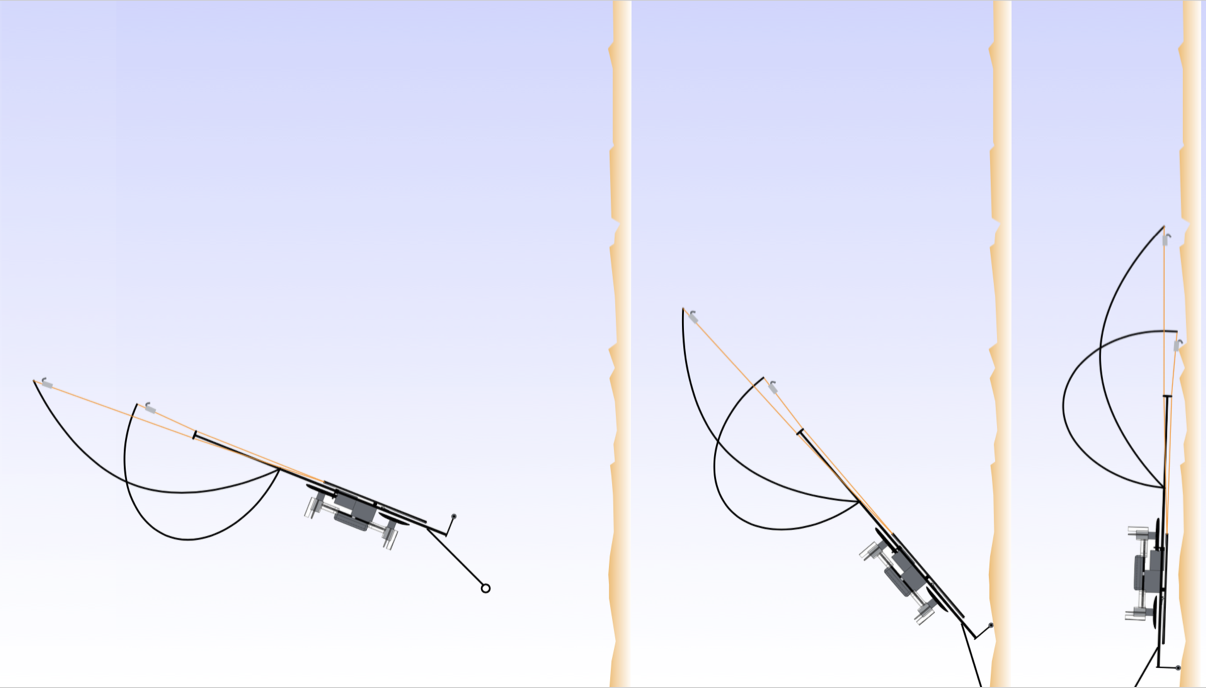
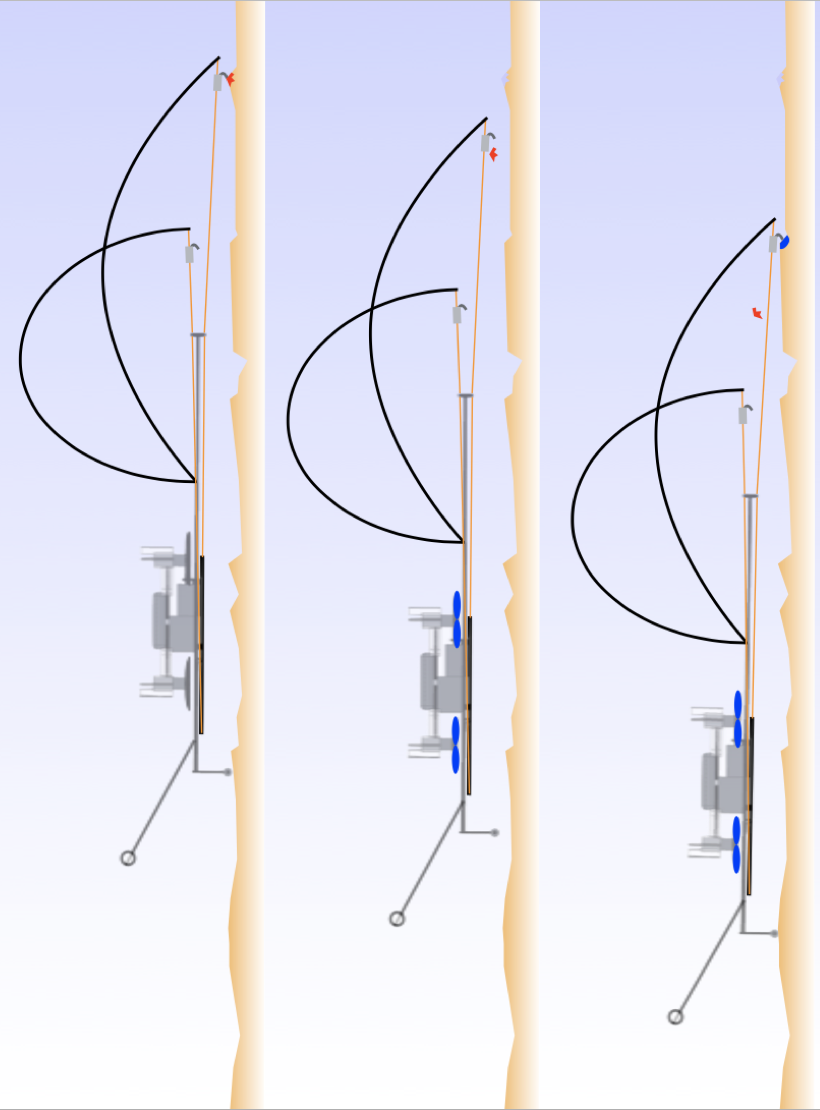
SCAMP's mechanically assisted perching strategy |
To perch, SCAMP flies tail-first into the wall. It detects the acceleration spike on impact and turns its rotors up to maximum. The tail acts as a pivot, and SCAMP attaches to the wall aerodynamically while its feet find good places to grip.
 |
 |
|
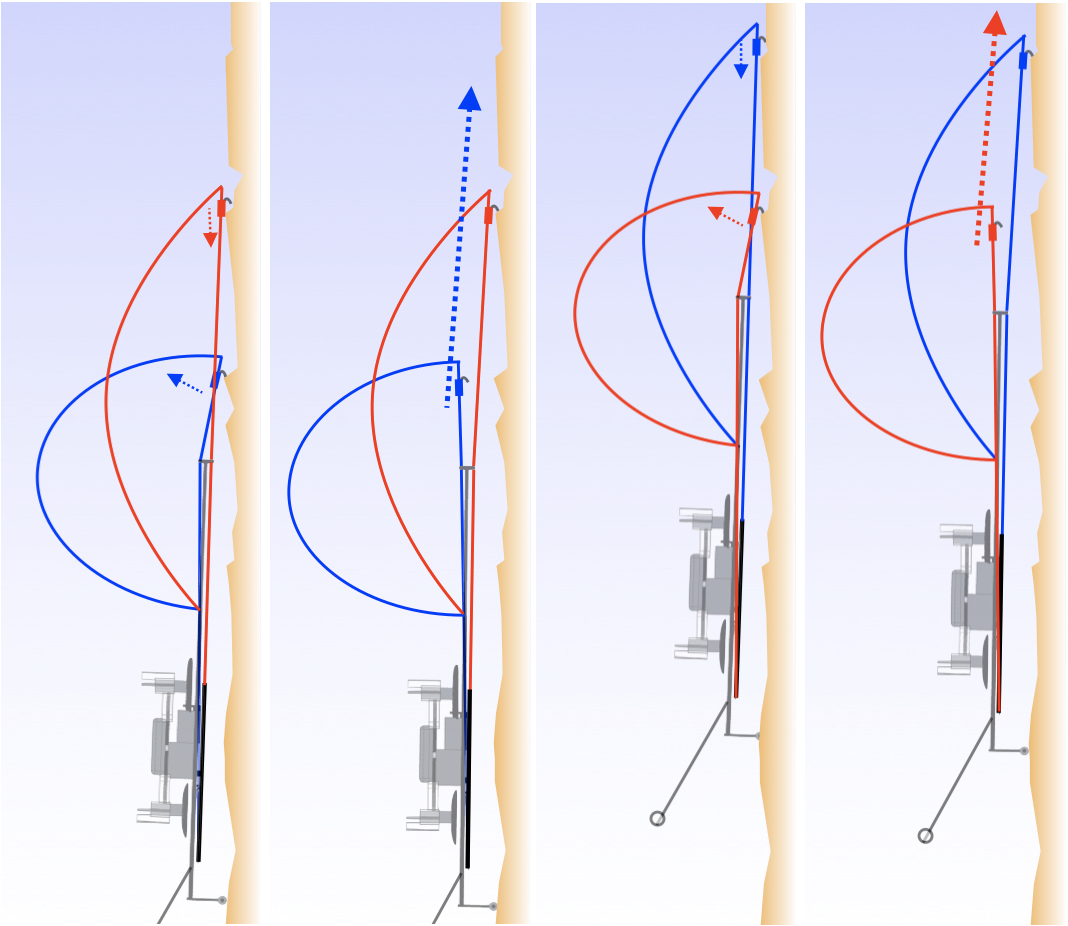
SCAMP climbs up the wall |
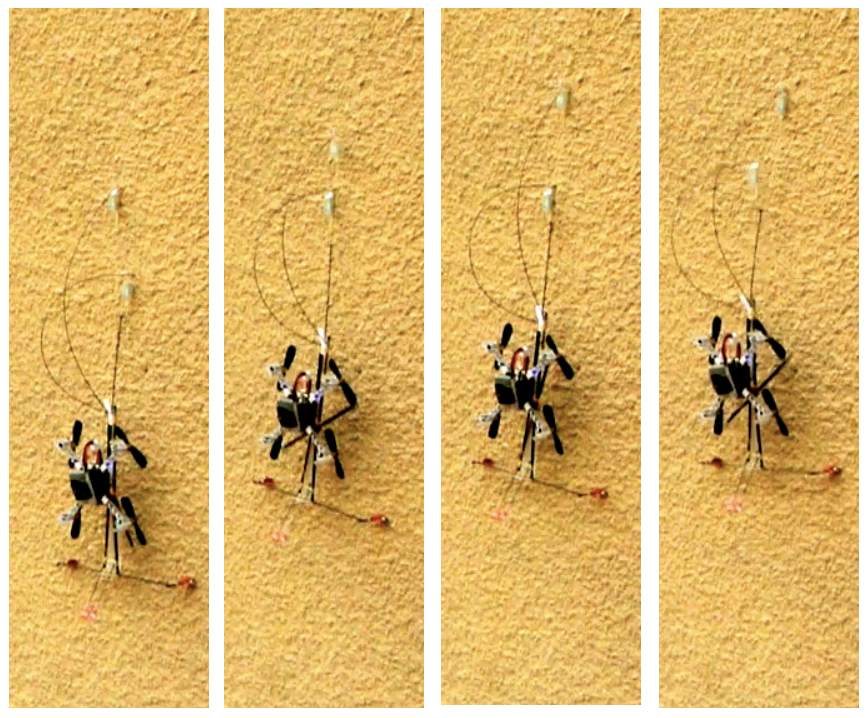
By alternating loads between its feet (shown here in red and blue), SCAMP is able to climb up the wall. SCAMP drags the unloaded foot along the surface until it engages a foothold. This removes tension on the engaged foot, which then releases.
 |
 |
|
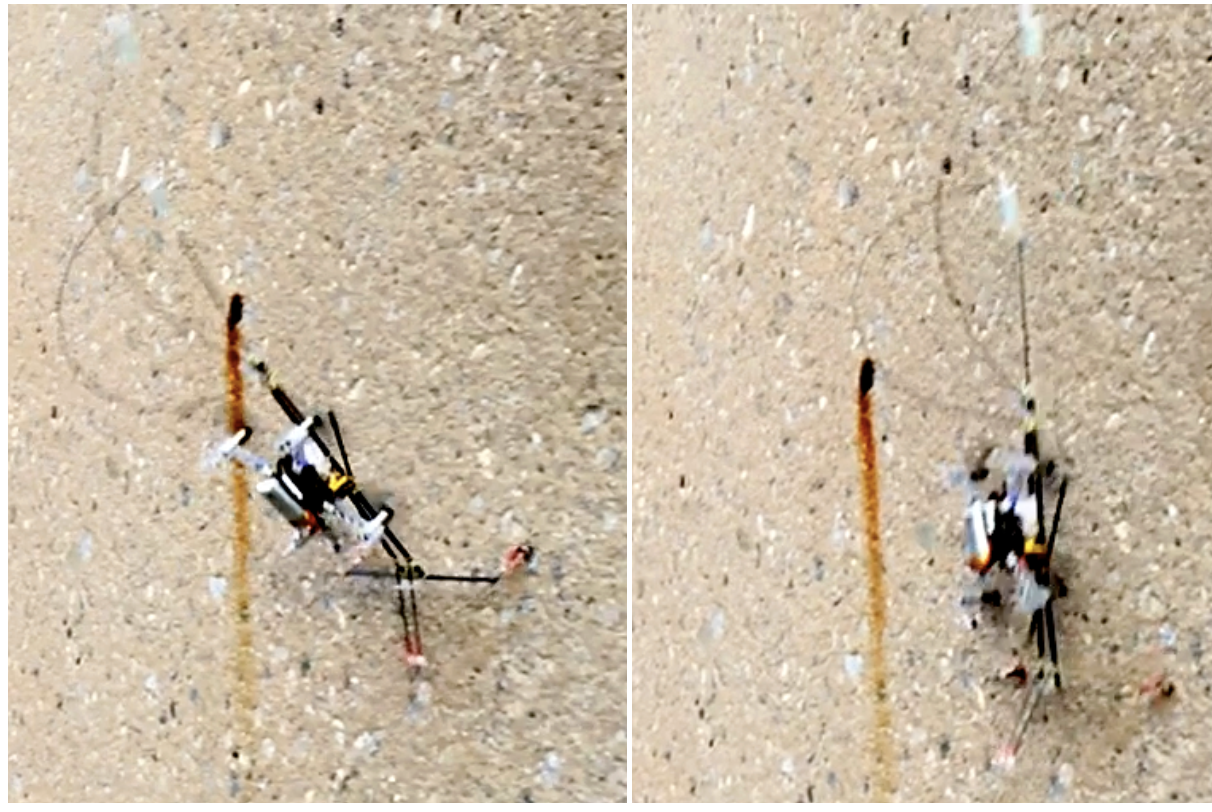
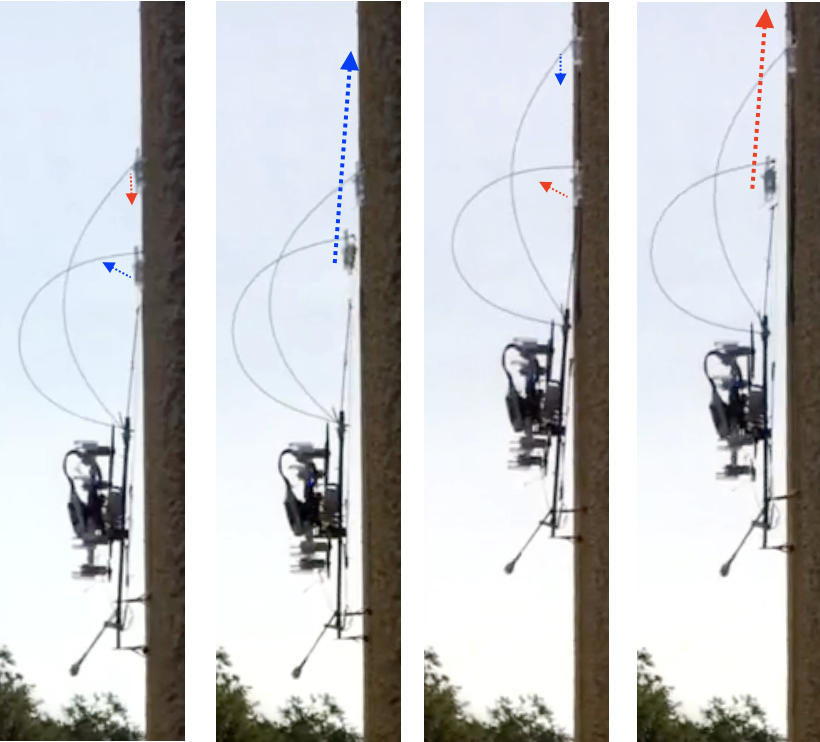
SCAMP's recovery strategy |
If SCAMP misses a step, its onboard accelerometers detect the resulting free-fall and the rotors spool up to gently push the robot back onto the surface. Its feet then re-engage with the wall and it can resume climbing.
 |
 |
|
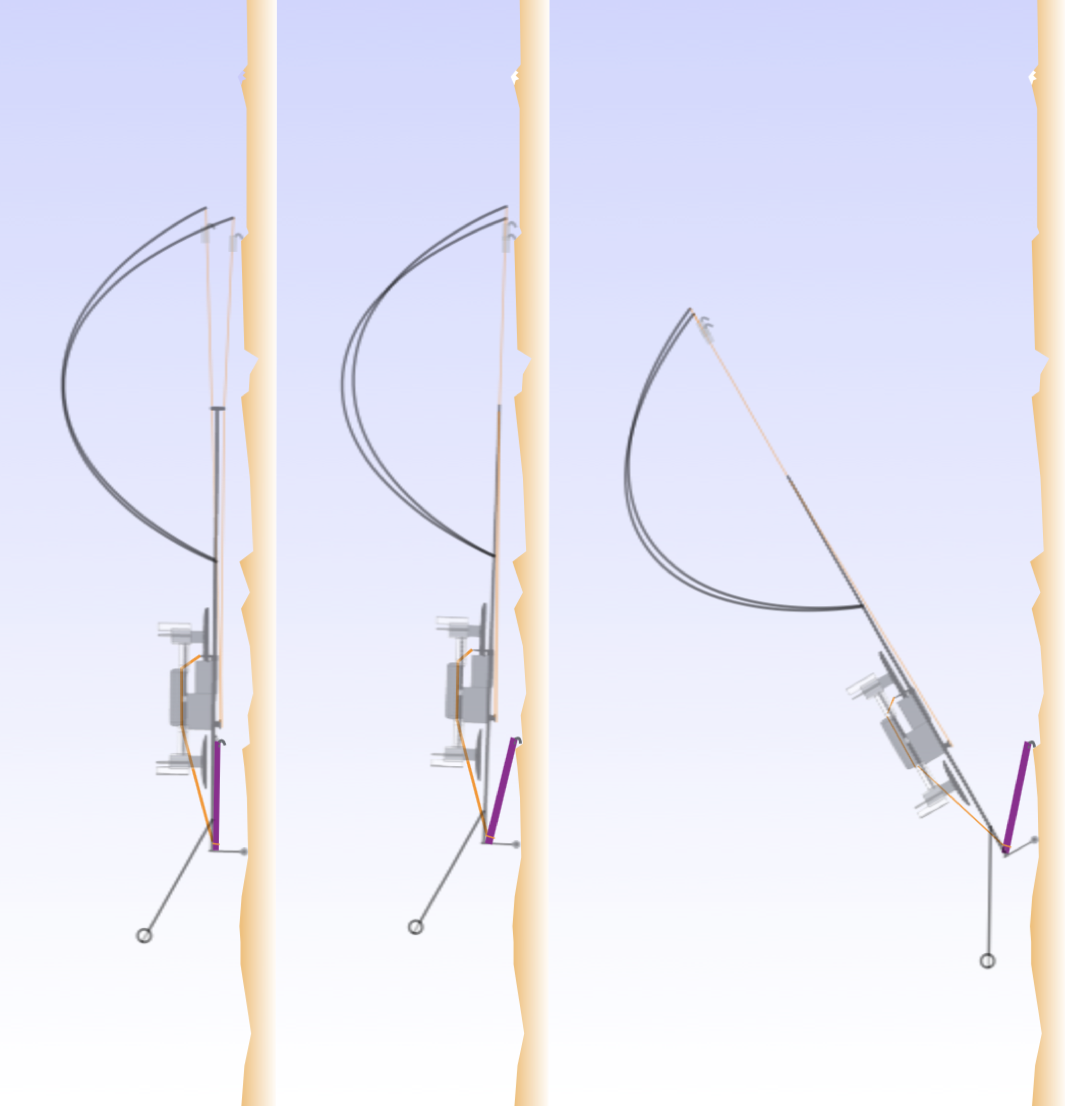
SCAMP returns to flight using a mechanically assisted rotation |
When SCAMP is ready to resume flight, it rotates its servos to a special position (not seen during normal climbing) to deploy a "takeoff spine". When load is transferred from the engaged foot to this spine, it rotates SCAMP away from the surface. Once SCAMP has tipped back a few degrees, the rotors start to spool up to normal flight levels and the robot can resume aerial operation.
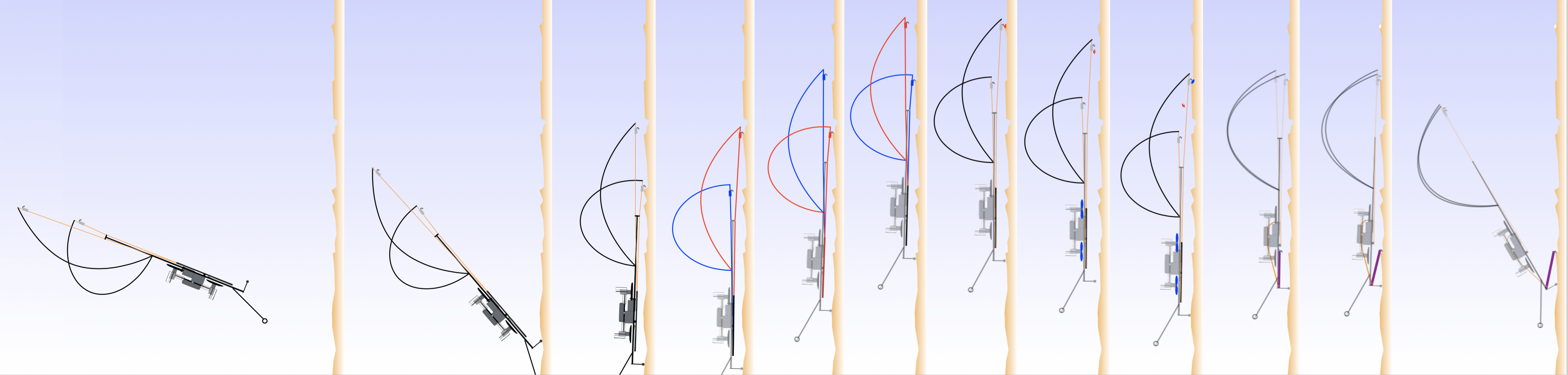
| Illustrated sequence of perching, climbing, failure recovery, and taking off |
Contact: Morgan Pope mpope [sticky] stanford [bot] edu
1.3 Klingon

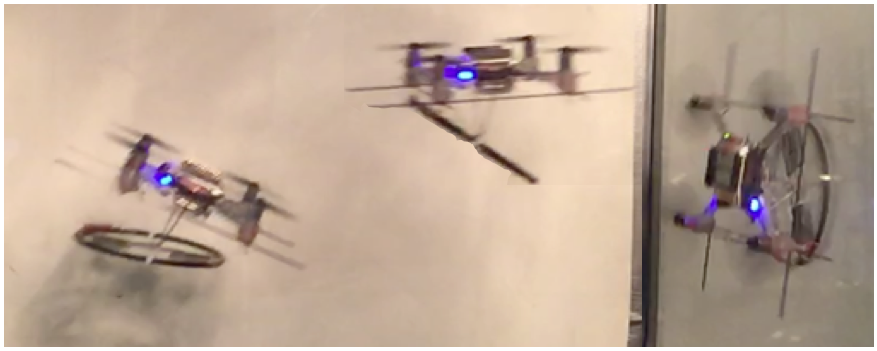
| Klingon climbing a window |
Klingon is the first robot to perch on a wall and transition to climbing. It is launched ballistically at a wall and uses opposed-grip pads to allow it to work on various surface orientations.
1.4 Dynamic Quadrotor Perching
(from DynamicRotorcraftPerchingMechanisms)
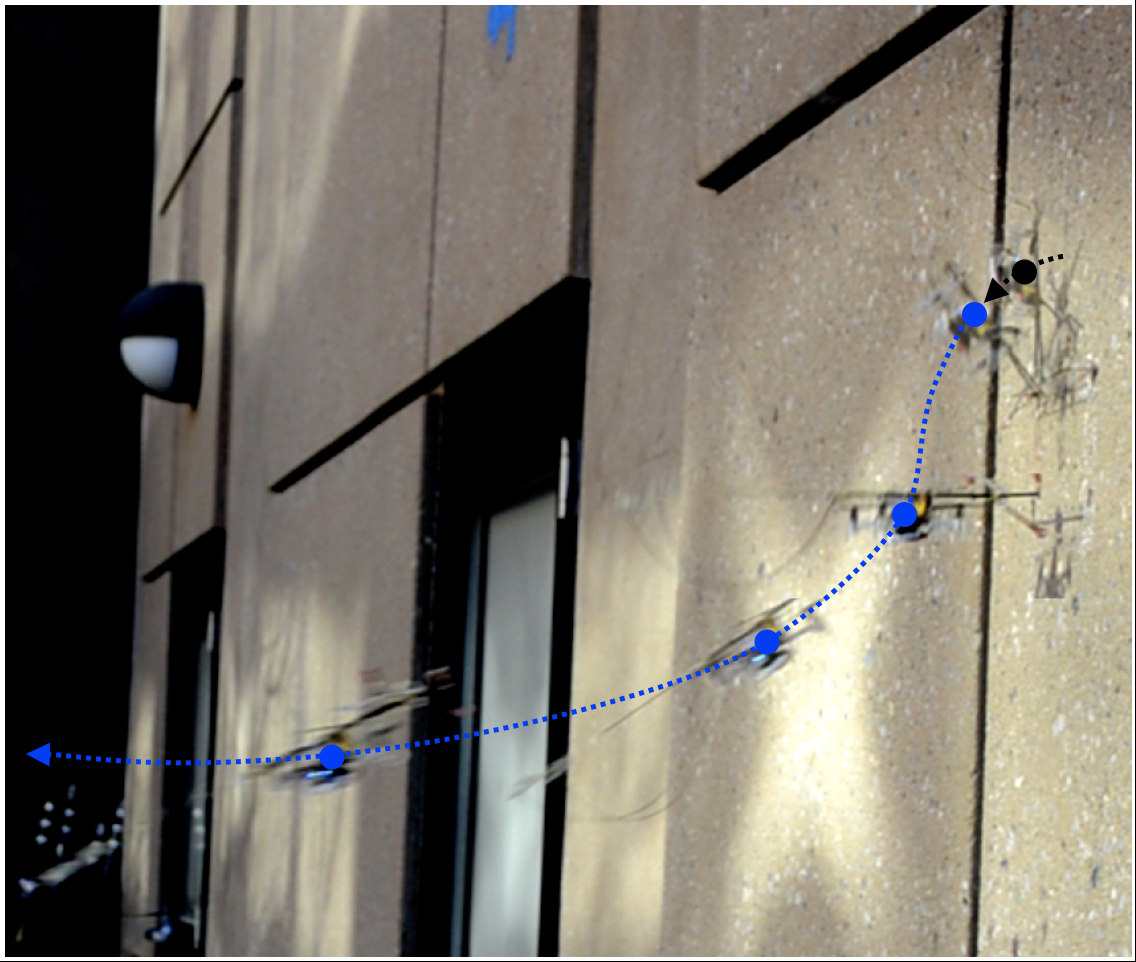
Perching at Stanford using the Bitcraze Crazyflie and onboard sensing.

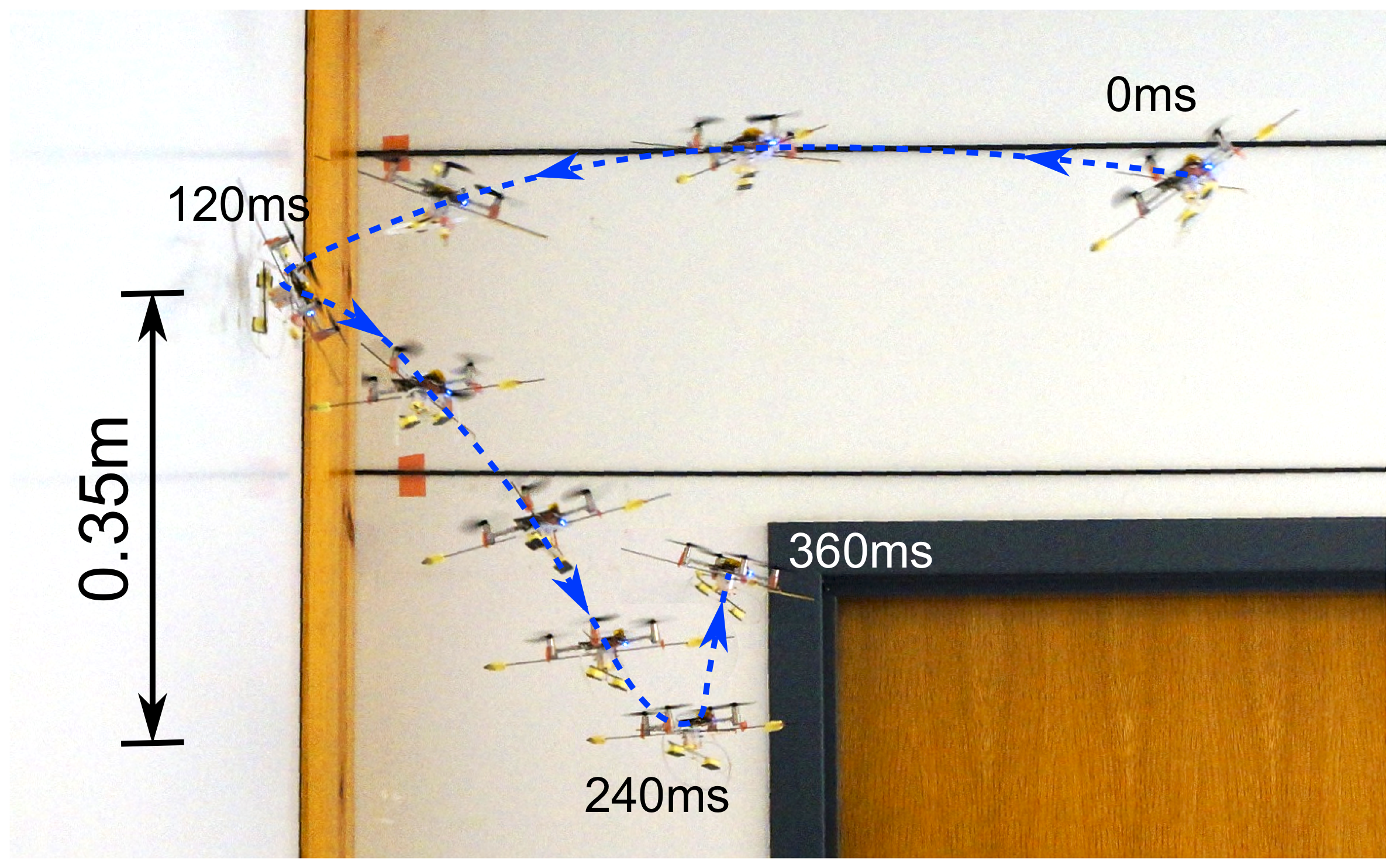
Perching at the University of Pennsylvania using AscTec Hummingbird and VICON.

Perching at the University of Maryland using the UMD MicroQuad and VICON.
| This project seeks to adapt what we have learned on climbing robots and fixed-wing perching to enable small rotorcraft to easily land, attach, detach and move along walls, ceilings and other surfaces in intermittent contact. The project is supported partly under ARL MAST (MCE 13-4.4) and by the National Science Foundation (IIS_1161679). We are collaborating with Vijay Kumar's GRASP lab, Prof. Sean Humbert's lab at U. Maryland and with Russ Tedrake's lab at MIT. We use a dynamic high-pitch-rate maneuver to allow us to perch using an undercarriage-mounted gripper. This allows us to also use our adhesives for grasping tasks. |  |
Recent work has enabled us to distinguish between success and failure using only the onboard accelerometer as feedback. We can then initiate a recovery routine. To determine what signals distinguished success and failure, we used a machine learning algorithm. After dozens of ballistically launched trials, we converged on a set of markers that distinguished between success and failure with 90 percent accuracy within 40 ms of impact. We extracted the most important feature from this algorithm and implemented it on the Crazyflie quadrotor. In twenty trials, fifteen of which were failures, the algorithm correctly differentiated between success and failure every time. The recovery routine halted downward motion after, on average, an 80 cm drop.||
1.5 Jumpgliding
(from JumpGliding)
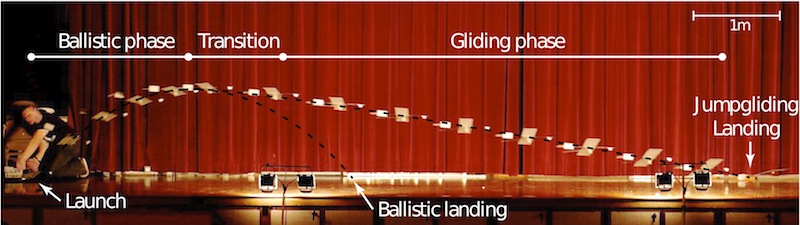
The relationship of small robots and aerial operation is a complicated one. Because the air is relatively more viscous at the low Reynolds numbers they tend to inhabit, becoming a pure flying vehicle has some serious implications for energy usage and mission life. But because obstacles on the ground can prohibit effective forward motion, getting up in the air is sometimes very attractive. A jumping robot is one compromise, trying to blend the efficiency of ground locomotion with the mobility of aerial maneuvering. If you are jumping around, there is one more consequence of being small that you should consider - allometric scaling dictates that surface area to mass ratios will increase. This means that the extra mass cost of weight-supporting wings tends to become proportionally smaller and smaller as you decrease in overall size. We exploited this fact to create a jumping and gliding robot - a jumpglider.
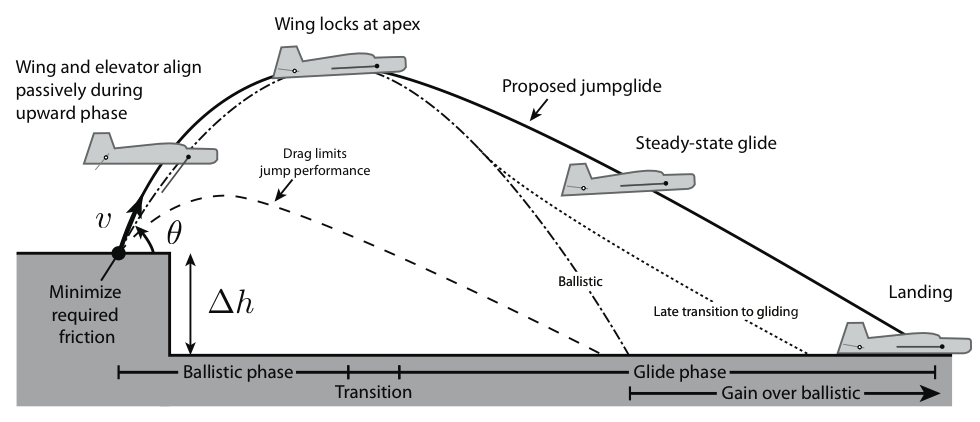
The basic strategy is to leap ballistically into the air - with the wings aerodynamically "off" - until the apex of the jump is reached, at which point the wings can be switched "on" and a stable gliding slope can be converged on.
1.6 Fixed-wing Perching
(from PerchingHome)
A flock of small, unmanned air vehicles flies quietly into a city, maneuvering among the buildings. They communicate as they search for places to land, not on streets or flat rooftops but on the sides of buildings and under the eaves, where they can cling, bat or insect-like, in safety and obscurity. Upon identifying landing sites, each flier turns toward a wall, executes an intentional stall and, as it begins to fall, attaches itself using feet equipped with miniature spines that engage small asperities on the surface. Using its propeller in combination with its limbs, the flier can creep along the wall and reorient for a better view.... The fliers stay attached for hours or days, consuming little power and emitting no sound as they monitor the area. When finished, they launch themselves with a jump and become airborne again, ready for their next mission. (from Perching Whitepaper)

Small aircraft move quickly and avoid terrain-based obstacles, but use a relatively large amount of power to maintain lift. Perching on a vertical surface creates previously unavailable surveillance and maintenance abilities that include the added benefit of drawing minimum power. Vertical surfaces are abundant in urban environment, are easy to detect and provide a large surface to land on.

Sometimes the best place to land is on a wall ...
1.7 Multimodal Robots in the News
Check out our introductory article on SCAMP in IEEE Spectrum!
More SCAMP coverage: Engadget (Video followup), NewsbeatSocial (video), Cnet, Slate, DailyMail, SimbleBotics, Nerdist, Mental_Floss, Technabob, TechXplore, IndustryTap, ZeeNews, Hitchhiker's Guide to Tech, Artificial Intelligence Online, Elektor Magazine, DamnGeeky, FayerWayer, EuropaPress, GenK, PCRevue, Futura-Sciences, Futurism, Slashgear, Drone360, TheApolloBox, and BitCraze.
New approach to perching gets some coverage: SlashGear, DigitalSpy, TechInsider, ZeeNews, Mashable, Gizmodo, The Verge, TechXplore, Geek.com, SeriousWonder. Original post on IEEE Spectrum
This New York Times article covers our quadrotor perching collaboration with UPenn and reviews a lot of other cool related projects in the lab.
PopSci and Gizmodo have some good coverage on our collaboration with the University of Maryland.
Gizmag has one of the best articles on our first Jumpgliding prototype. These articles at Inhabitat and The Tech Journal cover the same basic territory, while this article at Discovery.com refers to our later publication.