new web: http://bdml.stanford.edu/pmwiki
TWiki > Main Web>WebHome (14 Jul 2011, SanjayDastoor)
Main Web>WebHome (14 Jul 2011, SanjayDastoor)
 BDML: Home of Stickybot and friends BDML: Home of Stickybot and friends Contents: Quick Links (Full Web Map) *Web Links |
Welcome to the BDML wiki
This laboratory is part of the Center for Design Research at Stanford University. This website is primarily intended as a shared electronic notebook for BDML members. Visitors are welcome to peruse the public pages.Active Projects
 |
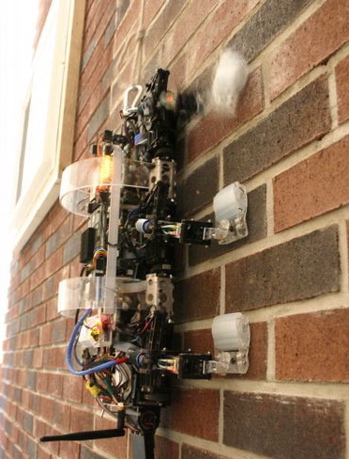
Perching: UAVs that can land and perch on walls using adhesion technology derived from RiSE | ||
 |
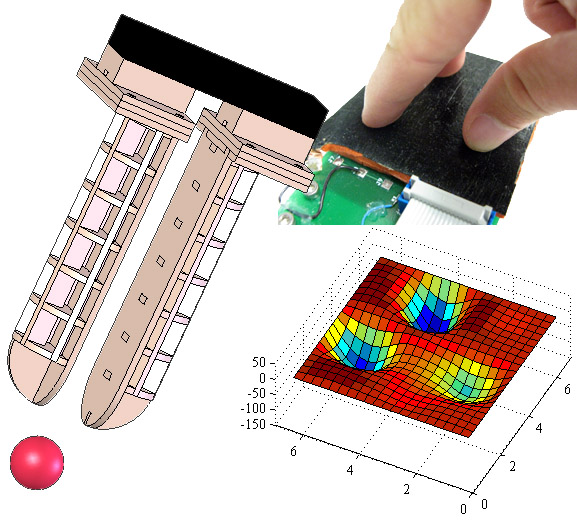
Haptics: Various projects on tactile sensing for arms and hands, wearable haptic feedback devices and force sensing for MRI-compatible medical devices | ||
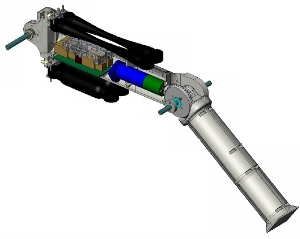 |
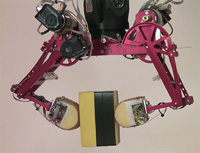
Human-Safe Robotics: Development of an arm structure and energy-absorbing artificial skin for a low-inertia, high-power manipulator (in collaboration with Stanford CS Robotics Lab) | ||
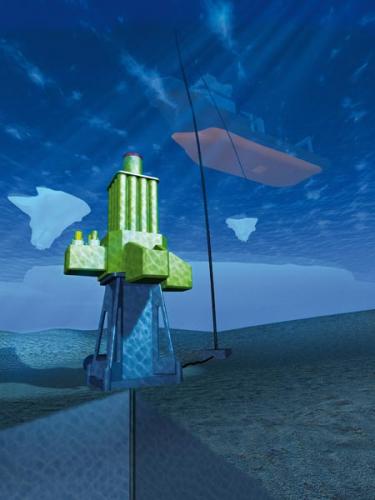 |
Seabed Underwater Robotics: Underwater, underactuated hand for use in an autonomous oil drilling rig | ||
 |
Mobile Manipulation: Sensing and object acquisition for a small mobile platform | ||
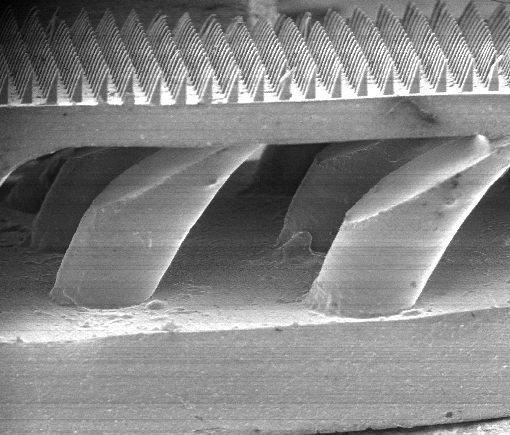 |
Micro-structured directional adhesive materials with applications to climbing. This project continues work begun under RiSE to create patches that scale to larger areas and a wider range of surfaces (e.g. rough, wet, dirty). | ||
Previous Projects
 |
Robots in Scansorial Environments (RiSE) (2003-2008) was a consortium of several robotics groups to create scansorial robots, adapted for vertical climbing and maneuvering. Work at Stanford focused on the development of directional spines and directional dry adhesives, demonstrated initially with Spinybot and Stickybot, respectively. The spiny feet were adapted to the RiSE Platform, developed by Boston Dynamics Inc. Work on adhesive patches continues under new projects. |
||
Ideas, requests, problems regarding TWiki? Send feedback