new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > GroupMeeting>GroupMeeting27Jul04 (09 Dec 2005, MarkCutkosky)
Rise Web>ClimbingRobot > GroupMeeting>GroupMeeting27Jul04 (09 Dec 2005, MarkCutkosky)
Group Meeting - Pre-Montana - 27 July 2004
TeleconNotes30July04?Let's collect slides and other work for Montana in this private Twiki page: SlidesAugust2004? Recent TWiki references:
- CompliantSpinedFoot?
- BiologyDesignLessons
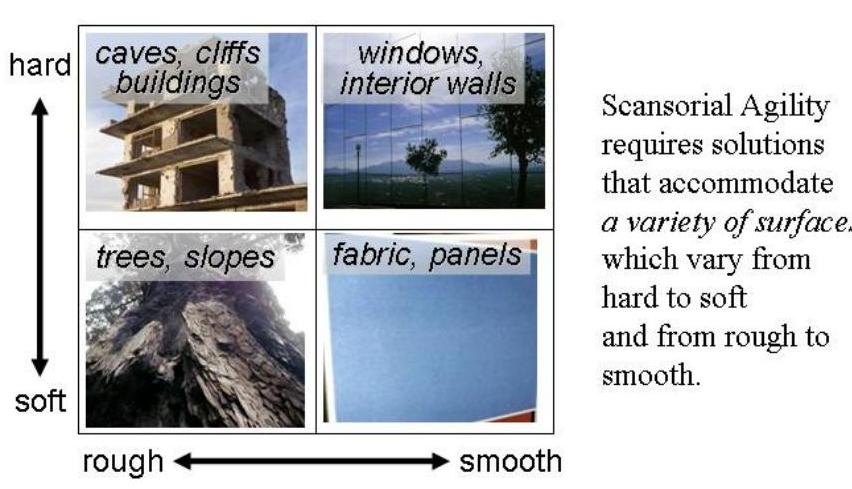
- "Quadrant Graph"
- Biology - Analysis - Engineering Cycle
- RiSE Feet
- Spined Feet (
 )
)
- Sticky Feet
- Simulations (Test Track and Entire Platform) - JonathanKarpick
- Analysis (Compliance, ...) - JonathanKarpick
- Surface Characterizations - distance required for traction based on surface and foot - MicheleLanzetta (maybe not for presentation?)
- Embedded Sensors - VirgilioMattoli
- Trajectory Parameterizatin - YongLaePark
- Link between work at universities and BDI towards next generation RiSE platform:
- the presentation of a pathway from the present RiSEbot 0.x revisions toward a inspired Motohide/spiderbot-morphed image of a planned RiSE 1.0 - Following rear leg/tail thoughts below and upcoming Feet design. - AMcClung / MiguelPiedrahita
- the presentation of a pathway from the present RiSEbot 0.x revisions toward a
- A slide that has many pictures showing the development of all the different feet that we worked on. So I want a picture of every foot variation that we can get a picture of all included on a single slide. It will be busy, but that's the point. What you see the is the product of many trials. - AlanAsbeck
- A few slides that illustrate what I am thinking are the Key Design Principles of spined and sticky feet. I will need :
- A schematic of the spined foot design. This could be a side cross section + top viewor something done in CAD or... - SangbaeKim / AlanAsbeck / JiLee
- Similar for sticky foot. - SangbaeKim
- These are preliminary! In fact, should consider the videos as being equivalent to the first Sprawl video
- Could think of the claws as replacing just the front legs of an insect -- the front tarsi that have distal claws and that try to get a grip on small asperities while the rear legs try to push. If you look closely at the videos of cockroaches on glass beads you'll see this kind of behavior. The front legs still have to get a grip to prevent pitch-back. The rear legs just push. I would be interested to get Bob and Dan's reaction to this idea... (Bridge from ToyBot to RiSE)
- We have not even given much attention to rear legs or tails yet. Things can only get better. We believe that the rear leg pushing and the tail will be more important when using sticky adhesion. Does Sangbae have anything to point people to for explaining why this is so?
Ideas, requests, problems regarding TWiki? Send feedback