new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>TWikiUsers>JiLee (20 Aug 2004, JiLee? )
Rise Web>TWikiUsers>JiLee (20 Aug 2004, JiLee? )
- Name: Ji Lee
- Email: jiheun@stanford.edu
- Company Name: Stanford SURF
- Company URL: http://bdml.stanford.edu
- Location: StanfordOffice
- Country: USA
- Comment: Summer undergraduate research program
Test Track Data
DanaAndJiExperiments DanaJiSchedule Friday June 25- finshing up test track tests
- brainstorming for foot design with Alan
- prototyping foot design
- updating Test Track data page
- working on the foot prototype with Alan for Wednesday
- coming up with a method of analyzing the test track data
- meeting with Trey on schedule for the summer
- meeting with Miguel, Alan and Dana on foot design
- weekly 9am meeting
- completed prototype with Alan; took pictures
- plotted, printed out the data from the test track experiment
- dana put up the data on twiki
- updating the Test Track data page
- analysed the test track data
- answered questions on the page
- to machine shop with miguel and dana
- Retest on lamellae feet
- Foot design meeting
- Finished up lamellae feet retests
- mounting dactyl foot
- calibrated the parameters for dactyl foot
- Meeting with Alan about foot design
- brainstorming and prototyping
- General group meeting
- foot prototype
- undergrad meeting at 9am
- plotted data, updated Twiki page
- foot prototype
- lab clean up
- foot prototype
- one legged toybot completed
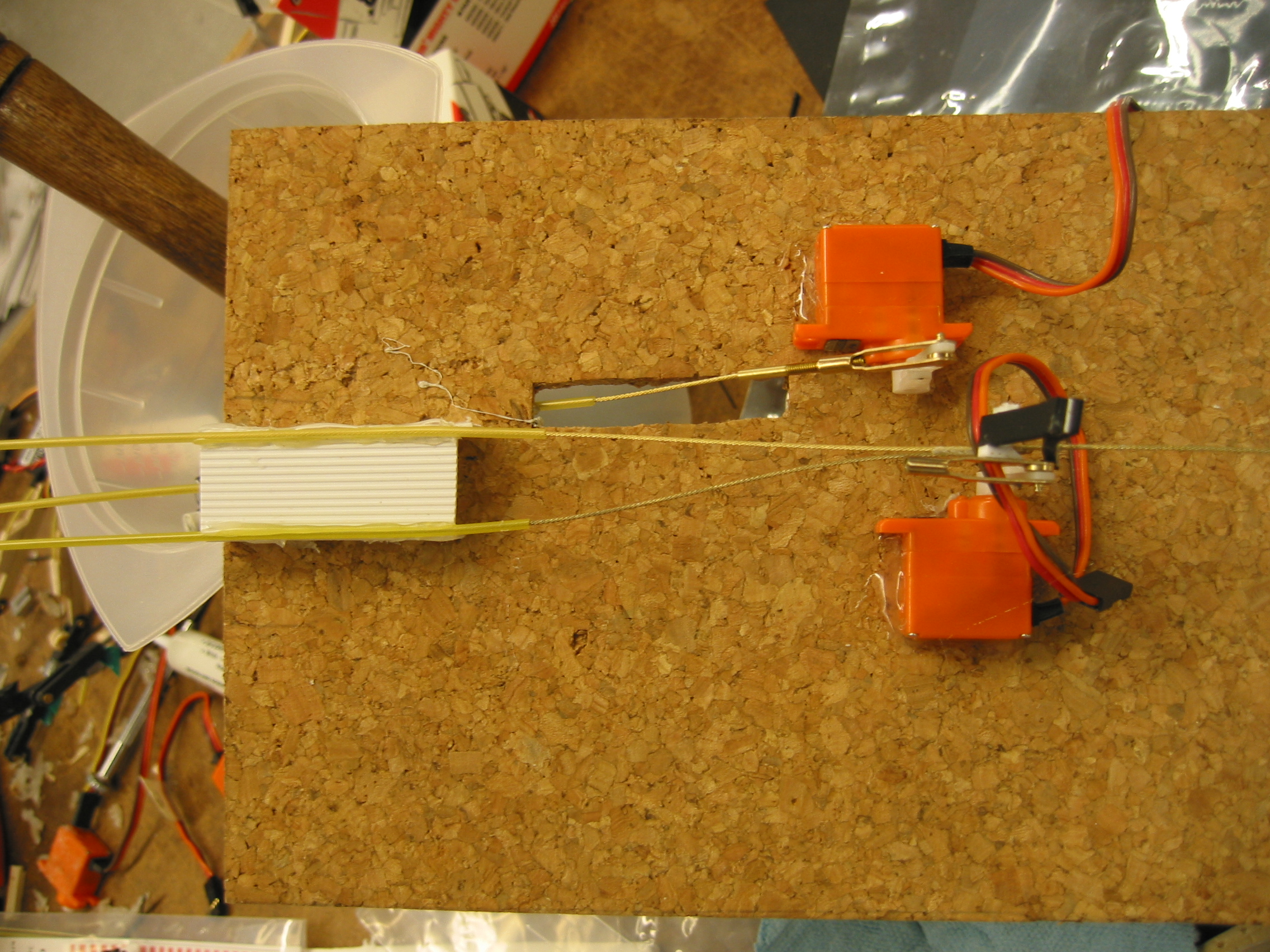 Friday Jul 9
Friday Jul 9 - foot prototype
- two legged toybot completed
- toybot testing on rough wall
- video: ToyBot04
- foot prototype
- ordered springs (to arrive tomorrow morning)
- brainstorming for how to add a second degree of freedom on the toybot
- weekly meeting
- shopping for supplies
- more foot prototyping - final platform with four legs and 6 servos
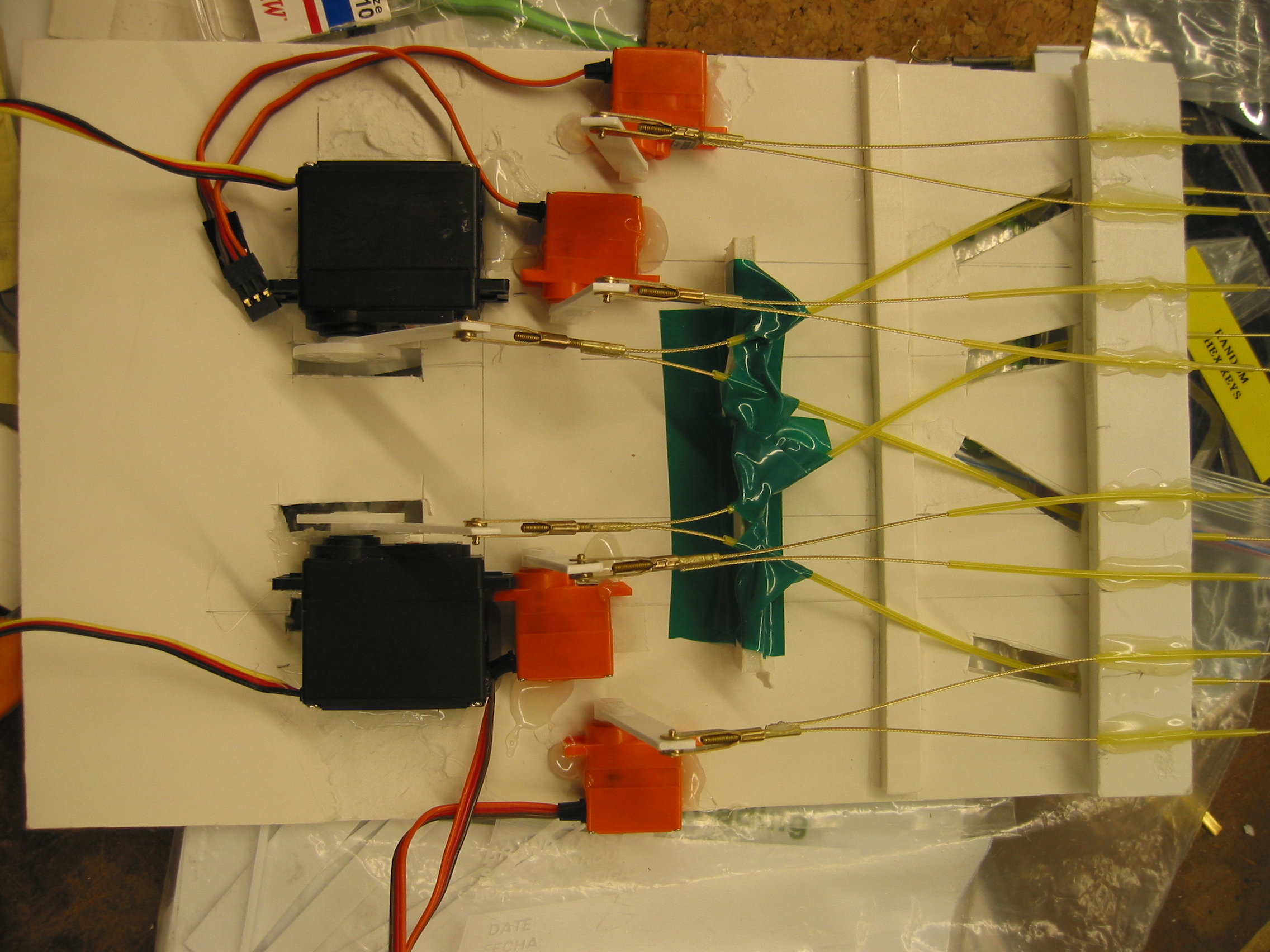 Wednesday Jul 14
Wednesday Jul 14 - meeting: new RiSE test track
- Reminder: record all test track parameters (5 parameters: distance between the test track and the force plat; the distance of the tip of the claw to the screw hole in x', y', and x'; the angle the track is at initially)
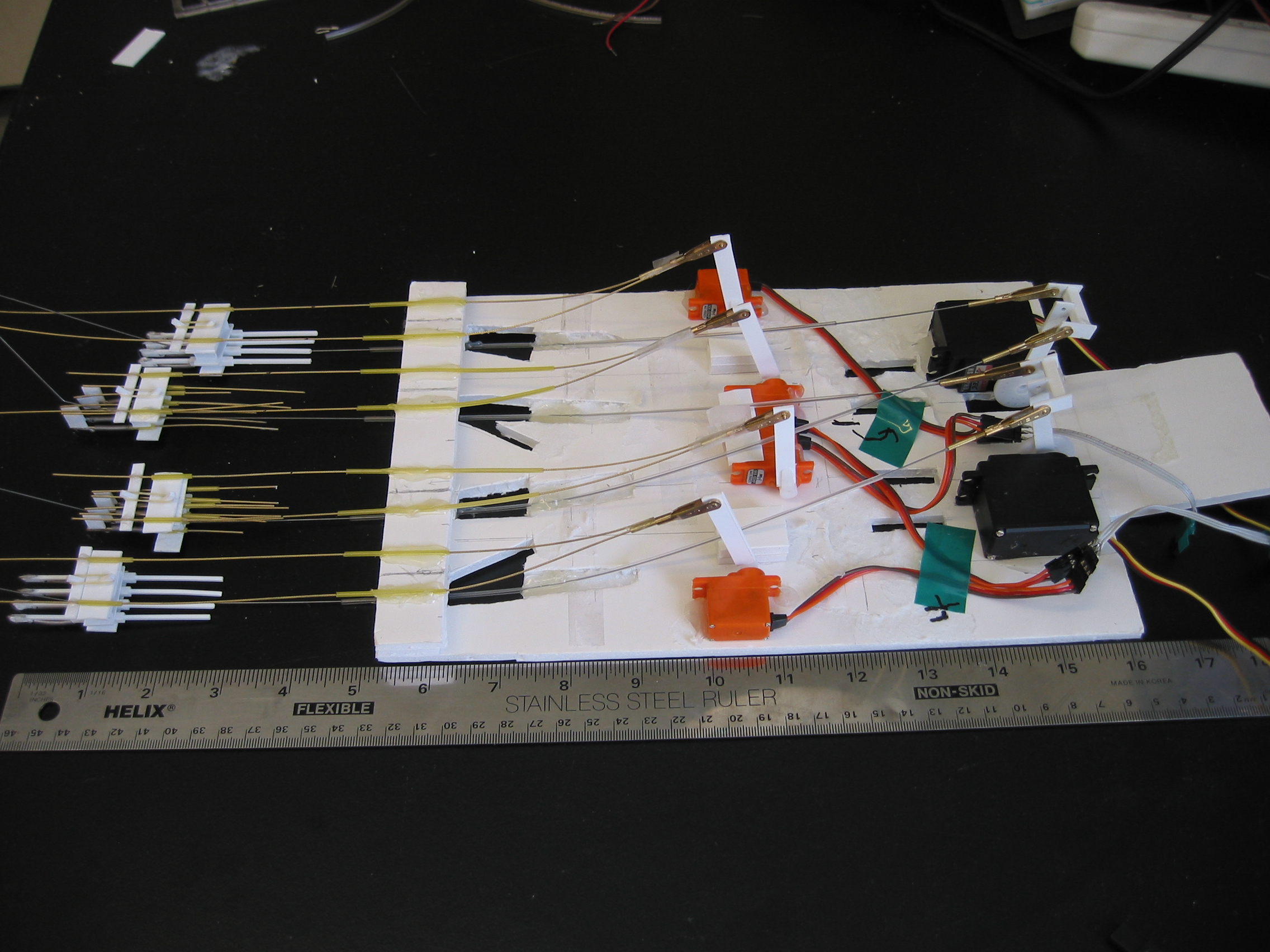
- completed foot prototyping
- two more white tube feet
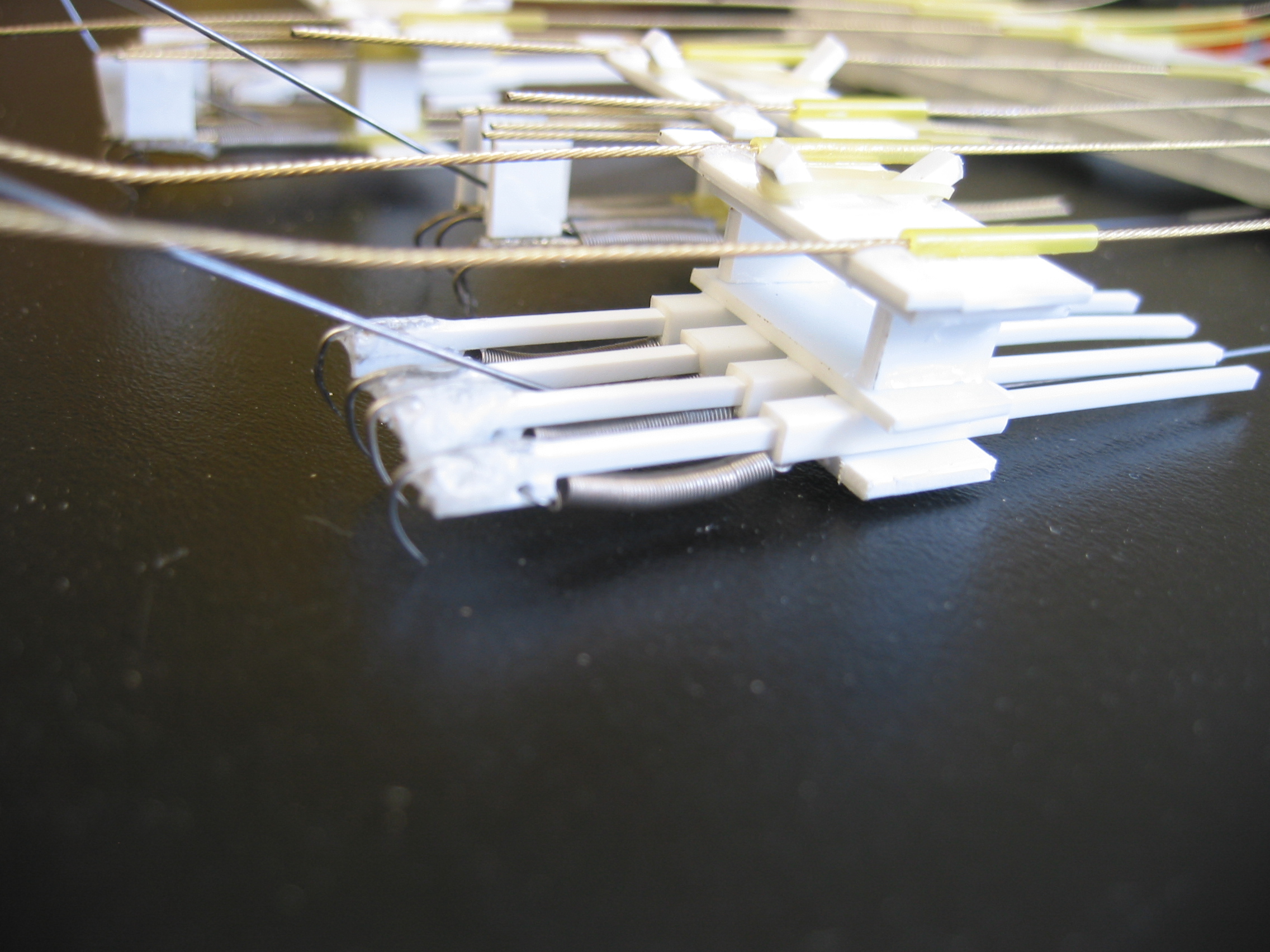
- changed to stiffer cables for the lower cables
- modified servo
- testing
- alan wrote a program for interpolation for Virgilio's Servocontrol.
- completed toybot
- minor modification on toybot
- calibrated positions of the servo with Virgilio's Servocontrol (on: \\chewie\users\JiLee\Sequence1)
- interpolated using Matlab.
- edited the calibrated points using Servocontrol, matlab (on: \\chewie\users\JiLee\OutputSequence4)
- saved the data onto the circuit board
- video of autonomous Tony V3 climbing take 1 (ToyBot04)
- video of autonomous Tony V3 climbing take 2 after fine tuning the positions (ToyBot04)
- more videos on different surfaces
- tried out different trajectories (on: \\chewie\users\JiLee)
- Sequence5C? : trajectory specific for rather smooth surface/ more circular trajectory while detaching/ greater distance of scraping down while attaching
- Sequence6: trajectory specific for rather rough surface
- video editing
- made the cover for the toybot
- reinforcing the toybot parts
- revised trajectories (on: \\chewie\users\JiLee)
- videos (ToyBot04)
- pebbled wall
- felt surface
- stucco wall
- relatively smooth MERL wall
- made the toybot to climb 4.3 times faster by changing the trajectory.
- video editing
- toybot repair
- putting feet together to be shipped out
- video editing
- brainstorming for dry adhesive feet
- video editing
- put together rough draft of slides for presentation
- brainstorming for dry adhesive feet
- brainstorming
- quick prototyping
- helped out on stickybot
- built the stickybot
- programmed sequence for trajectory, however, revision of the toybot design was required
- more video shooting- climbing all the way up the stucco wall
- editing
- toybot repairing
- video shooting
- lab clean up
- weekly lab meeting
- brainstorming
- design meeting- presentation by Sangbae on the findings on stickybot
- discussion on future direction of toybot
- scheduled meeting on Tuesday at 1:30 pm for design brainstorming
- quick meeting with mark on montana review
- general overview of what is expected for the august demonstration
- weekly lab meeting (presentation done in Montana)
- brainstorming for 2nd version of spinybot
- design meeting at 1:30pm - more robust manufactured feet/ various ideas for foot actuation
- spring order to be made
- foot prototyping
- brainstorming
- finished up the 2-page report
- more foot prototyping
- foot prototyping
- solidworks modelling
- foot prototyping (toes)
- lab clean up
- tried to use the haas machine but broken
- manually machined the blue wax mold for SDM
- brainstorming for attaching the rubber band
- prototyping
- solidworks modelling
- poured polyurethane to cure
- took the cured part off the mold by machining
- made the foot
Ideas, requests, problems regarding TWiki? Send feedback