new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > ProjectManagement>IndependentSprawl (31 Jul 2010, DanAukes)
Rise Web>ClimbingRobot > ProjectManagement>IndependentSprawl (31 Jul 2010, DanAukes)
-- MarkCutkosky - 7 May 2010 added link to Takram You Tube video
iSprawl is the first fully autonomous member of the Sprawl family and represents a transition between the Biomimetic Robotics MURI and the new RiSE project.
iSprawl development on this page:
 After many design iterations, including remachining the original Sprawlita pistons to put in double seals to handle negative pressure on the return stroke, a version of Aqua Sprawl was produced that ran fairly well:
After many design iterations, including remachining the original Sprawlita pistons to put in double seals to handle negative pressure on the return stroke, a version of Aqua Sprawl was produced that ran fairly well:
A movie of Aqua-Sprawl Although Aqua Sprawl ran reasonably well, there is a fundamental limitation to the achievable speed because while retracting the pistons, only atmospheric pressure is available. On the other hand, this could be a good design for underwater use!
Although Aqua Sprawl ran reasonably well, there is a fundamental limitation to the achievable speed because while retracting the pistons, only atmospheric pressure is available. On the other hand, this could be a good design for underwater use!

 Click to see video
* push-pull cable.AVI: New push -pull cable leg thrusting system
The investigation culminated in a rough prototype with a styrofoam body. As the video shows, it is fast but unstable due to poor location of the center of mass and insufficient leg stiffness. (The legs are just bare cable ends):
Click to see video
* push-pull cable.AVI: New push -pull cable leg thrusting system
The investigation culminated in a rough prototype with a styrofoam body. As the video shows, it is fast but unstable due to poor location of the center of mass and insufficient leg stiffness. (The legs are just bare cable ends):
* "StyrofoamSprawl": "Critical functional prototype" of New I-sprawl
 Click to enlarge picture
Click to enlarge picture
 Click to see video
Click to see video
(June 2004)
NEW updated video and results Click the picture below!
iSprawl V2: Retuned iSprawl is now running at 15 body-lengths/second (over 2.3m/s).
Details to be posted soon.
3Mb movie 14Mb movie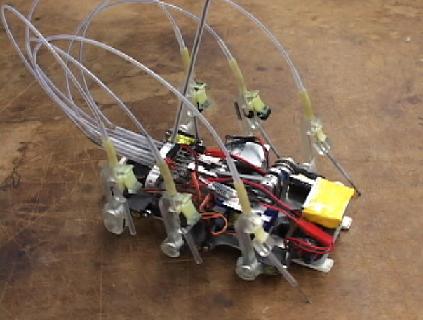 Click to see video
Click to see video
 Click to see video
Click to see video
iSprawl is the first fully autonomous member of the Sprawl family and represents a transition between the Biomimetic Robotics MURI and the new RiSE project.
iSprawl development on this page:
- iSprawl design and results summarized in iSprawl: Design and Tuning for High-speed Autonomous Open-loop Running, IJRR 2006.
- IsprawlPrivate? page created for work in progress...
-
 Jump down to the Movies and PDF of the paper
Jump down to the Movies and PDF of the paper
- Youtube video of Phasma - a spinoff of iSprawl from Takram design in Japan August 2009.
- iSprawl v2 Pictures -- Pictures (June 04) of iSprawl v2
- iSprawl v2 (April 04) -- retuned with in-line springs and extra dampers. 15 body-lengths/second
- iSprawl v1 (Aug 03) -- wireless, lithium polymer batteries, push-pull cables,
- Cable Sprawl (v0) (June 03) -- first version with push-pull cables.
- Aqua Sprawl (April 03) -- early version with hydraulic push/pull system.
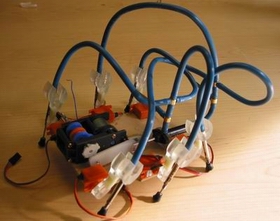
AquaSprawl (April 2003)
The idea was to explore hydaulic power transmission to distribute power to the legs. The tubes contain water and the system works like hydraulic brakes on a car, with a single master piston and slave pistons at each leg. Aqua Sprawl is assembled in a bathtub to prevent air bubbles.
After many design iterations, including remachining the original Sprawlita pistons to put in double seals to handle negative pressure on the return stroke, a version of Aqua Sprawl was produced that ran fairly well:A movie of Aqua-Sprawl
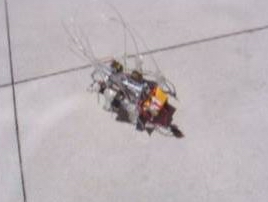
Cable Sprawl (iSprawl) (June, July 2003)
Following an undergraduate design project sponsored by MarkCutkosky during Spring 2003, it was decided to investigate low-friction push/pull cables instead of hydraulics. For more information on the cables, see the ME113 report.. Instead of the paint ball gun drive investigated by the ME113 students, I decided to try a crankshaft:
Click to see video
* push-pull cable.AVI: New push -pull cable leg thrusting system
The investigation culminated in a rough prototype with a styrofoam body. As the video shows, it is fast but unstable due to poor location of the center of mass and insufficient leg stiffness. (The legs are just bare cable ends):* "StyrofoamSprawl": "Critical functional prototype" of New I-sprawl
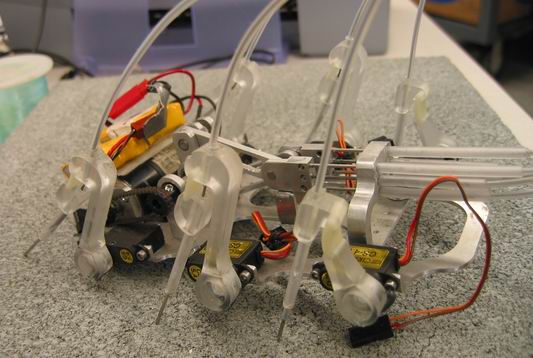
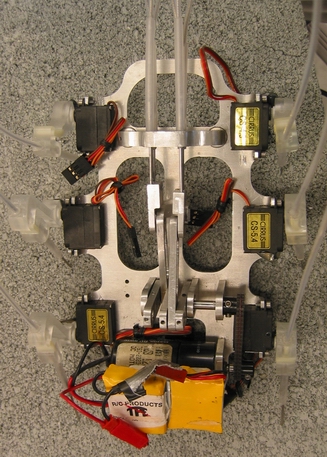
iSprawl V1 (August 2003)
This version has an aluminum chassis and legs with flexures manufactured by ManufacturingHome, like the other Sprawl robots.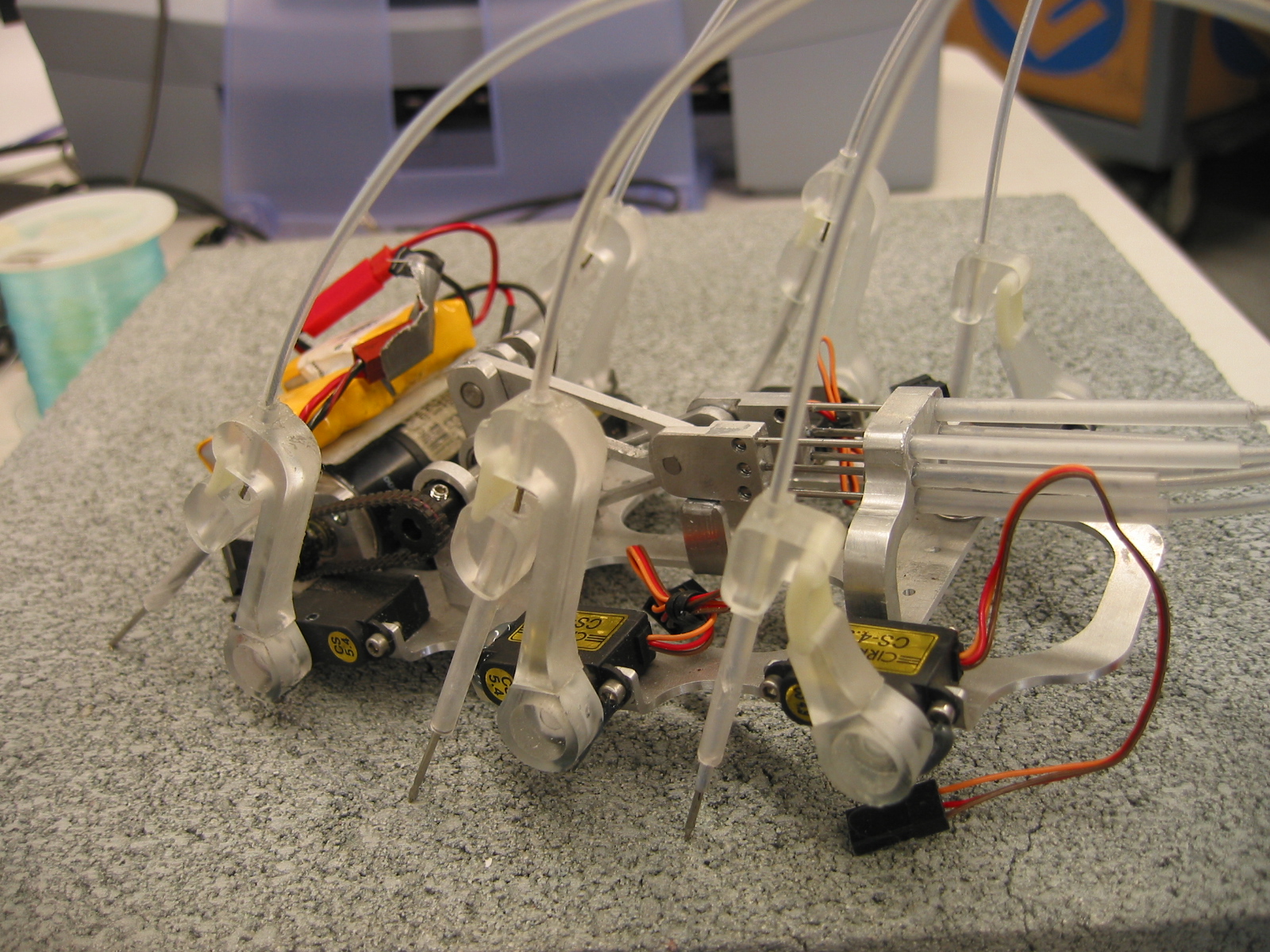 Click to enlarge picture
Click to see video
Click to enlarge picture
Click to see video
| Top view | Bottom view | Side view |
 |
 |
 |
NEW updated video and results Click the picture below!
Pictures
New pictures (June 2004) of iSprawl v2
http://bdml.stanford.edu/iSprawl/PicsJune04/
iSprawl V2: Retuned iSprawl is now running at 15 body-lengths/second (over 2.3m/s).
Details to be posted soon. 3Mb movie 14Mb movie
Click to see video
High speed video
Click to see video
Before I impliment axial(thrusting direction of the leg) compliance, the robot was less stable and much slower as video shows below.
Table of specifications for iSprawl V1:| Part Specification | ||
| Part | Specification | Weight |
| RC Servo |
| 5.4g |
| Battery |
|
|
| Motor |
| 53g |
| Gearhead |
| 35g |
| Legs |
|
|
| Cable & tubing |
|
|
| Chassis,crank & Mounts |
|
95g |
| I-Sprawl |
|
315g (6 pack battery & RC receiver) |
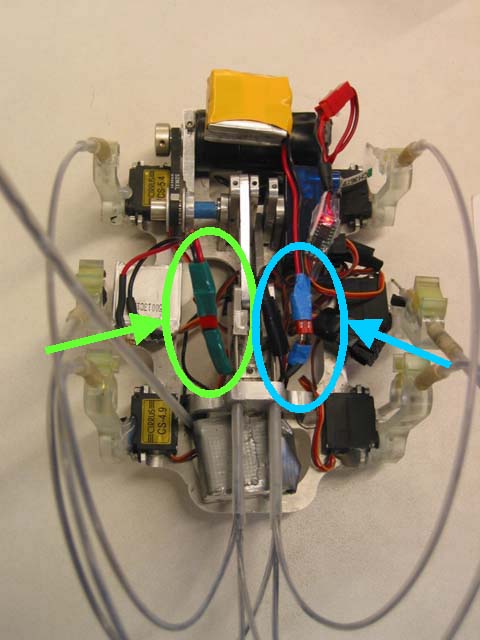
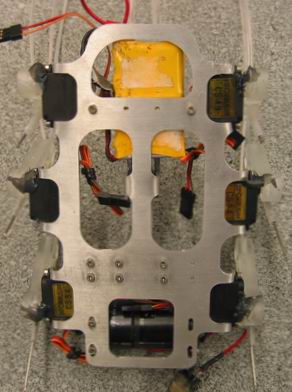
Connections for iSprawl
There are 3 battery power sources. Two of these sources (front and rear) are stacks of 3 Li-polymer batteries that are put in series to power the motor (~24V). The other (currently above the middle right servo motor) is used to power the servo/motor controller and receiver. The following steps may be useful to activate iSprawl.- Turn on the transmitter power (it should make a funky noise).
- Connect the green tagged wires, black to black, red to red.
- This activates the receiver and powers the servos
- Connect the blue tagged wired, black to heat shrink (black), red to red.
- This powers the motor, which has a mini, in-line circuit that blinks RED when in use.
useful Links:
- Link to iSprawl project folder in Docushare
- Pictures (June 2004) of iSprawl v2
- CLAWAR 2004 paper -- "iSprawl : Autonomy and the effects of power transmission"
- See the IsprawlPrivate? page for the final(?) draft of journal version of paper
- Link to iSprawl's Designer Sangbae Kim's Biomimetics world hompage
Ideas, requests, problems regarding TWiki? Send feedback