new web: http://bdml.stanford.edu/pmwiki
TWiki > Main Web>SeabedRig (08 Jun 2010, MarkCutkosky)
Main Web>SeabedRig (08 Jun 2010, MarkCutkosky)
|
Private Web for collaborators Contents: Sub Pages |
Seabed Rig: Underwater Robotics
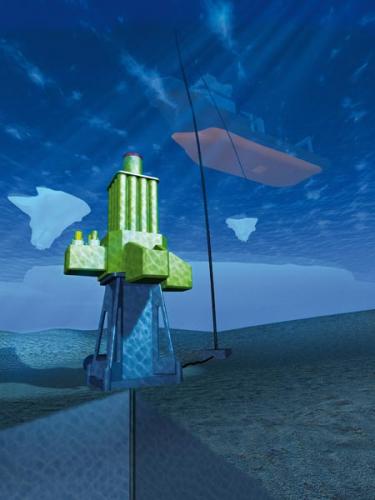
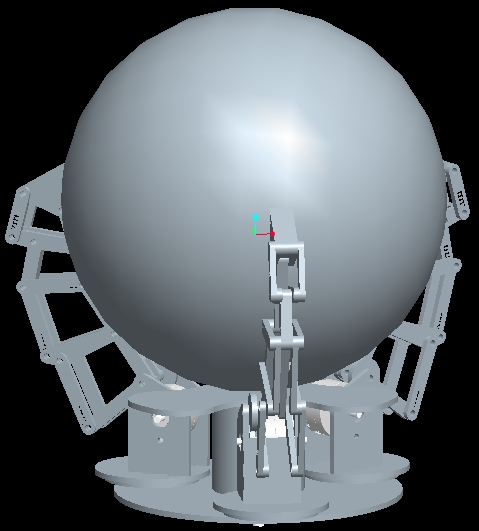
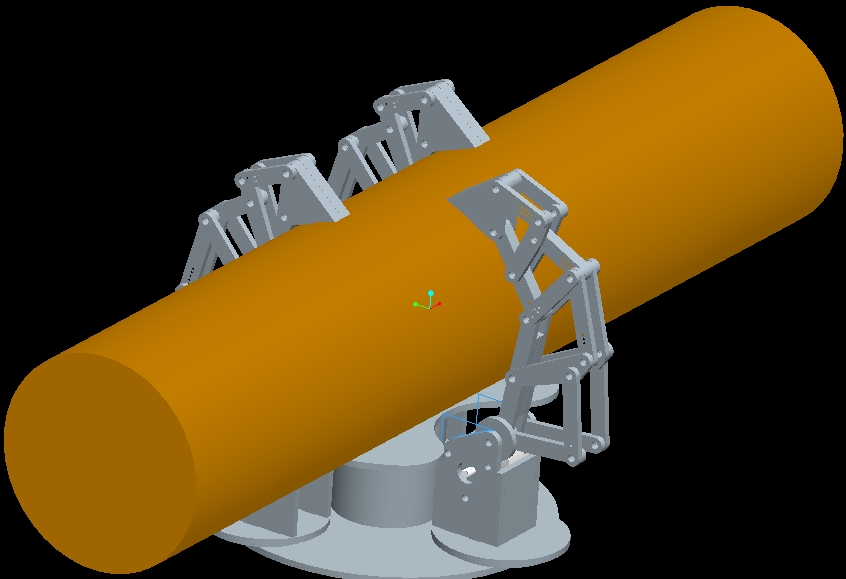
BDML is collaborating with Seabed Rig, a Norwegian drilling company, on the development of an underwater multi-purpose hand. This hand will be required to perform a variety of tasks in an autonomous underwater drilling rig. The primary purpose is to afford the sea-level personnel monitoring the rig the ability to deal with unexpected situations; e.g. removing a bent/broken drill pipe, moving stray hydraulic cables out of harm's way, or positioning objects during repair/reattachment. This unstructured task description demands a hand that is extremely adaptable in its ability to grasp varying objects. Additionally, the hand will be operated in a remote location for extended periods of time, requiring it to be exceptionally robust. These requirements have led us to focus on an underactuated design with three fingers. Underactuation decreases complexity and number of actuators to help achieve the goal of robustness while at the same time helping the hand passively adapt to a wide variety of objects.Hand Design
A preliminary underactuated finger design has been completed, and the fingers are being manufactured. The next step is the design of a base/palm to house the three fingers, as well as the design of the underactuation and interaction between the fingers.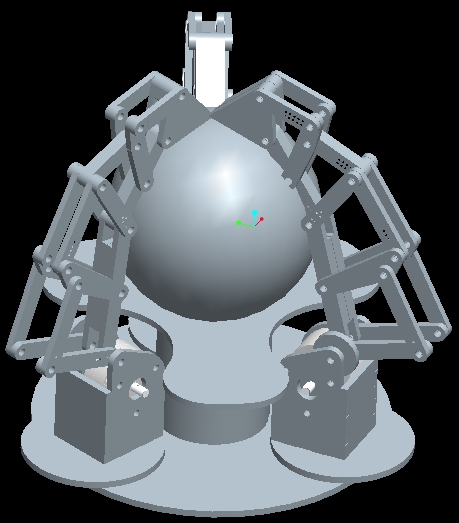

 Overview of hand design/control issues at RSS 2010
Overview of hand design/control issues at RSS 2010 - RSS2010Cutkosky_v2.ppt: draft of RSS slides
Hand and Grasp Control
The main arm control is being developed by Energid using their Actin software. The particular grasp algorithm(s) we develop or adapt for use with our hand will be interfaced with this software in order to integrate control of the manipulator. We are currently investigating GraspIt! and EigenGrasps, among other existing algorithms. Once the first prototype has been built, we will begin to test their effectiveness.Tactile Servoing for Grasping
The underwater environment this hand will operate in will present a significant sensing challenge. The drilling will introduce mud and particulate into the surrounding water making it very difficult to get precise information about objects that may need to be grasped and moved. One interesting avenue of research is how to use tactile sensing and tactile servoing to improve grasp quality by making medium- and fine-scale adjustments to the position and orientation of the hand when only gross global data is available about the object. For example, the sensors may be able to make out a rough lump on the drill floor, with only approximate dimensions; how can the hand form the appropriate grasp with such limited outside information?People
| BDML | |
|---|---|
| MarkCutkosky | |
| DanAukes | |
| BarrettHeyneman | |
| JohnUlmen | |
| SeabedRig | |
| Roald Valen: | Robots & Control System Manager |
| International Research Institute of Stavanger (IRIS) |
|
| Øystein Arild: | Research Director, Risk Management |
| Energid | |
| James English: | President and CTO |
| Neil Tardella: | Operations Manager |
Ideas, requests, problems regarding TWiki? Send feedback