new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > ProjectManagement > GumbyBot>ToyBot04 (03 Aug 2004, SangbaeKim? )
Rise Web>ClimbingRobot > ProjectManagement > GumbyBot>ToyBot04 (03 Aug 2004, SangbaeKim? )
Demonstration Platforms
Machines to explore 'advanced' climbing concepts for difficult vertical surfaces such as concrete or glass. Alternative use of 3 and 4 feet in FeetSequence -- MicheleLanzetta? %ENDCOMMENT% PsaToybotTony v0.3
-- AlanAsbeck - 22 Jul 2004 Video that is the first draft of the August 3 video. Comments are welcome and should be sent to AlanAsbeck.- TonyV3Aug3_DivX200kbps.avi: First draft of August 3 video, DivX? format
- TonyV3Aug3Mark_Sorenson2.mov: First draft of August 3 video, Quicktime format
- TonyV3Stucco_DivX.avi: Video of Tony V3 climbing a stucco wall (DivX? compression)
- TonyV3Stucco_Sorenson.mov: Video of Tony V3 climbing a stucco wall (Sorenson compression - Quicktime)
- TonyV3ClimbingStucco2.mov: This video shows the robot climbing up another patch of stucco, this time without smooth patches. We also updated the trajectories a little so that the feet detach more smoothly, and the robot climbs a little faster.
- TonyV3ClimbingStucco.mov: This video shows the four-legged, 2-DOF version climbing a stucco wall. We think it falls off because there are some small patches where the stucco is pretty smooth and has few irregularities.
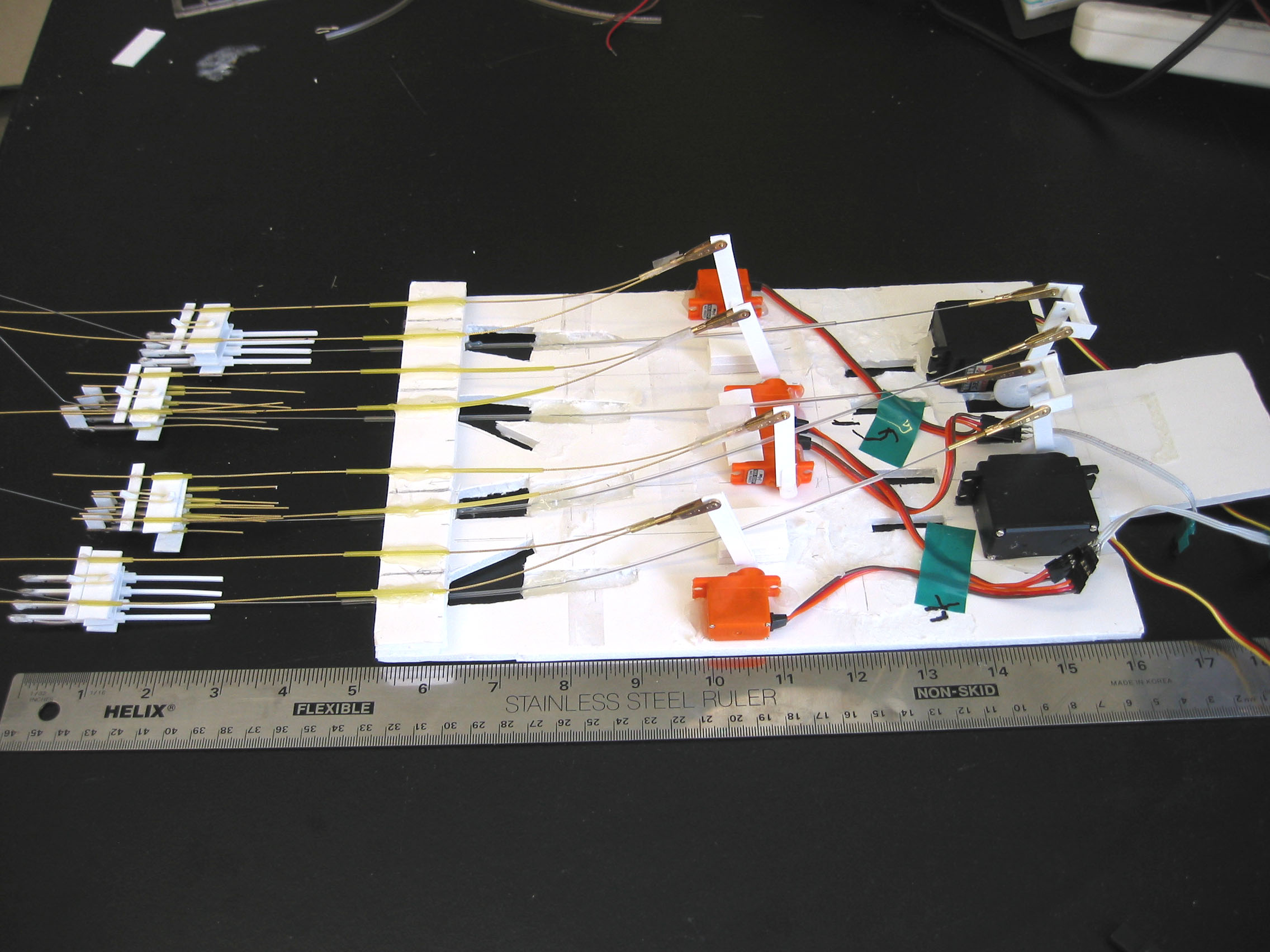
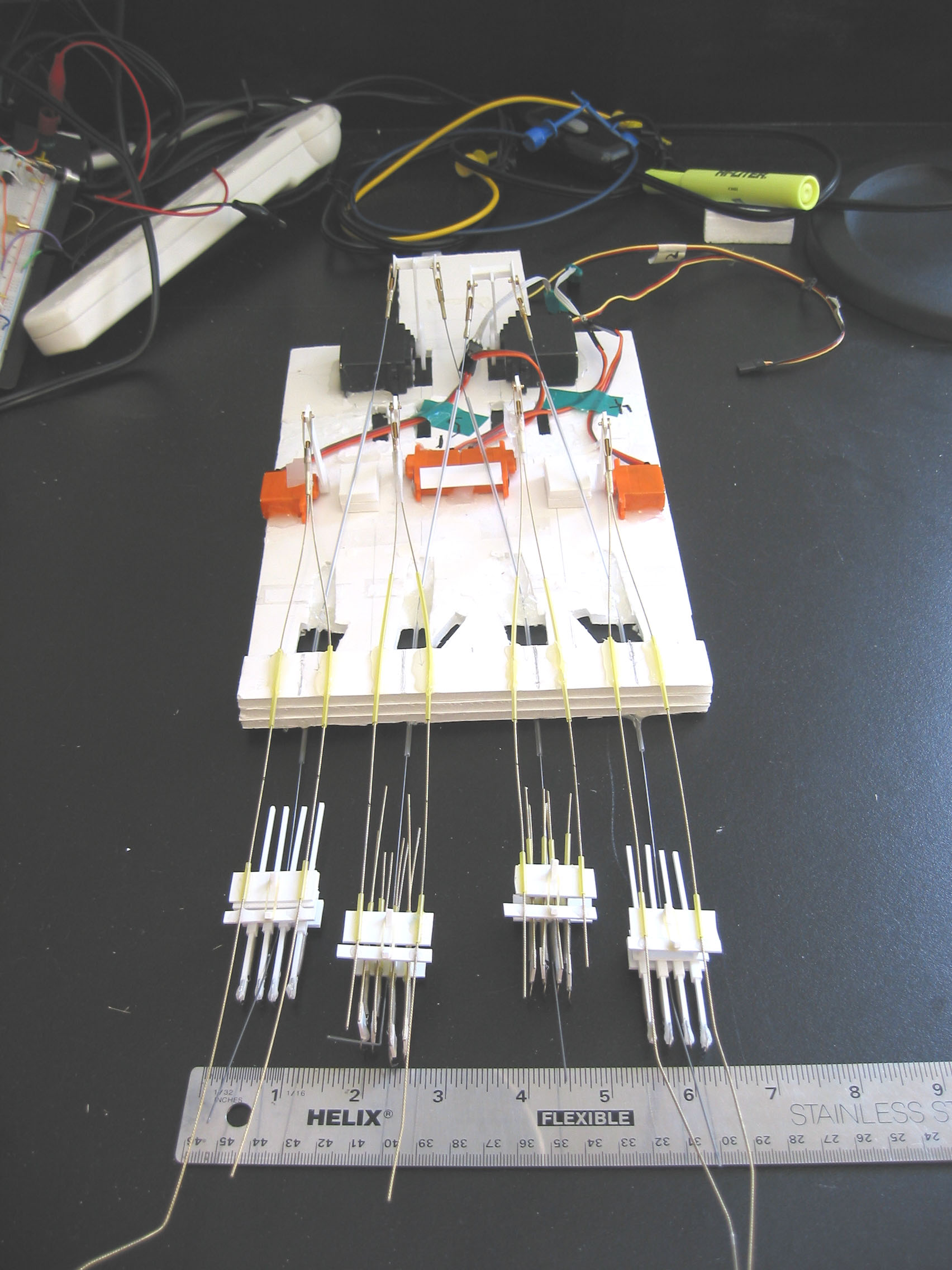
- Tony V.3, side and front view: (see bottom for full images)
Tony v0.1, v0.2 (a.k.a "T.T.")
-- MarkCutkosky - 09 Jul 2004This machine climbs flat vertical concrete walls, untethered. So we have named it Tony Tetherless ("T.T." for short). The machine uses lithium polymer batteries, push-pull cables, etc. from the old iSprawl toolbox. V0.2 will have more limbs (for redundancy) and/or a rear leg and/or friction pads for stabilization. The key thing we need now is more robustness so that we can climb to the top of a building!
- Tony2.mov This video shows a version with two toes climbing a rough concrete wall. We think we can do smoother walls soon...
- Tony1.mov: This clip shows a single two-tendon toe on smooth concrete. The design is described further in the NewFootDesignsJune04 page. Note the peel and un-peel motion.
Servo Driver Controller for Demonstration Platforms Implementation
ServoDriverController -- VirgilioMattoli? - 21 Jul 2004 I developed a driver for the control of demonstration platforms that use many servo motors. The driver is powered by a microcontroller PIC18F252? and allow real time control of 8 servos in the first hardware version (V 1.0) and 12 servos in the second one (V 2.0). The user can control each servos by a PC interfaced with the driver board. The board is also able control autonomously the servos, using an opportune sequence preloaded by the user on the micro. The driver board was succefully utilised in the actuation of the Tony v0.3 For datails refers to ServoDriverController design pageIdeas, requests, problems regarding TWiki? Send feedback