new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > ProjectManagement>GumbyBot (22 Aug 2005, AMcClung? )
Rise Web>ClimbingRobot > ProjectManagement>GumbyBot (22 Aug 2005, AMcClung? )
Gumby Bot
--Main.MarkCutkosky July 04 -- the logical successor to GumbyBot is ToyBot04, a demonstration platform being constructed to explore "advanced" vertical climbing for AugReview04 and subsequent demo in October 04. My main work to date includes the design and construction of a Gumby-Bot, that functions as a poseable body for testing new feet ideas. The main goal was to make as light a frame as possible with legs that were pliant enough to pose, but stiff enough to support the weight of the robot in that pose when placed on the wall. The Gumby-Bot has 5 holes on each side so the number and position of legs may be adjustable. In addition, it has a hole drilled in each of the front and back for optional addition of a head and tail.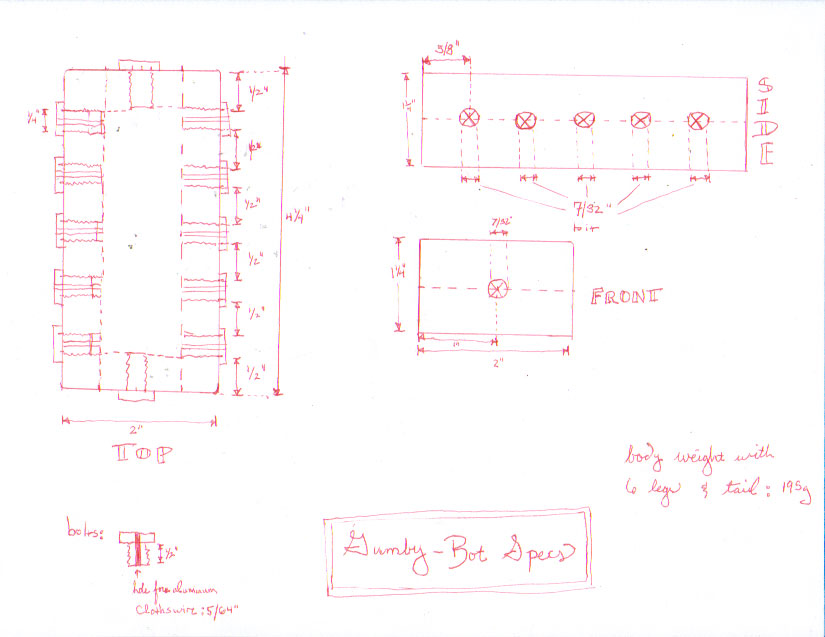
 My next goal is to work on foot attatchments. Until we can get a sample of synthetic gecko setae, I would really like to work on a back up method for adhering to smooth surfaces. Since much work has been done on suction and wet adhesion (such as climbing toys and the mecko gecko) the next most viable biomimetic solution seemed to be the use of thrust by birds to scale bales of hay, as researched by Kenneth Dial. See PartridgeThrust.
-- TiffanyCard? - 23 Jun 2003
My next goal is to work on foot attatchments. Until we can get a sample of synthetic gecko setae, I would really like to work on a back up method for adhering to smooth surfaces. Since much work has been done on suction and wet adhesion (such as climbing toys and the mecko gecko) the next most viable biomimetic solution seemed to be the use of thrust by birds to scale bales of hay, as researched by Kenneth Dial. See PartridgeThrust.
-- TiffanyCard? - 23 Jun 2003 Ideas, requests, problems regarding TWiki? Send feedback