new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > ProjectManagement > GumbyBot > ToyBot04>PsaToybot (30 Aug 2005, MarkCutkosky)
Rise Web>ClimbingRobot > ProjectManagement > GumbyBot > ToyBot04>PsaToybot (30 Aug 2005, MarkCutkosky)
Findings on Stickybot
-- VirgilioMattoli?Consideration on feedback from servomotors
- Hi have preliminary investigated the possibility to use the measure of current consumption as an indicator for the torque force applied by a servomotor. That in order to tray to have some easy information about the forces acting on the different legs. I have just measured the current required by a servomotor to hold a fix position vs. the force produced by the torque moment through a moment arm of about 87 mm (For the tests I have used a orange servomotor).
- The relation between current and torque force is not linear and unfortunately it is also not reproducible. Just to have an idea for a torque moment of 5*10-3 N/m can be required 70 150 260 mA, an for 8,5*10-3 N/m can be required 100 200 300 mA, depending of the situation
. That behaviour is mainly due to strong friction produced by the gears inside the servomotors! In addition to the fact that in normal dynamic operation a servomotor can drain more then 600 mA, that means that current feedback in servomotor for force evaluation NOT seems to be a suitable solution. * Picture3.jpg:
 Movie of PSA Toybot is
-- AlanAsbeck
Movie of PSA Toybot is
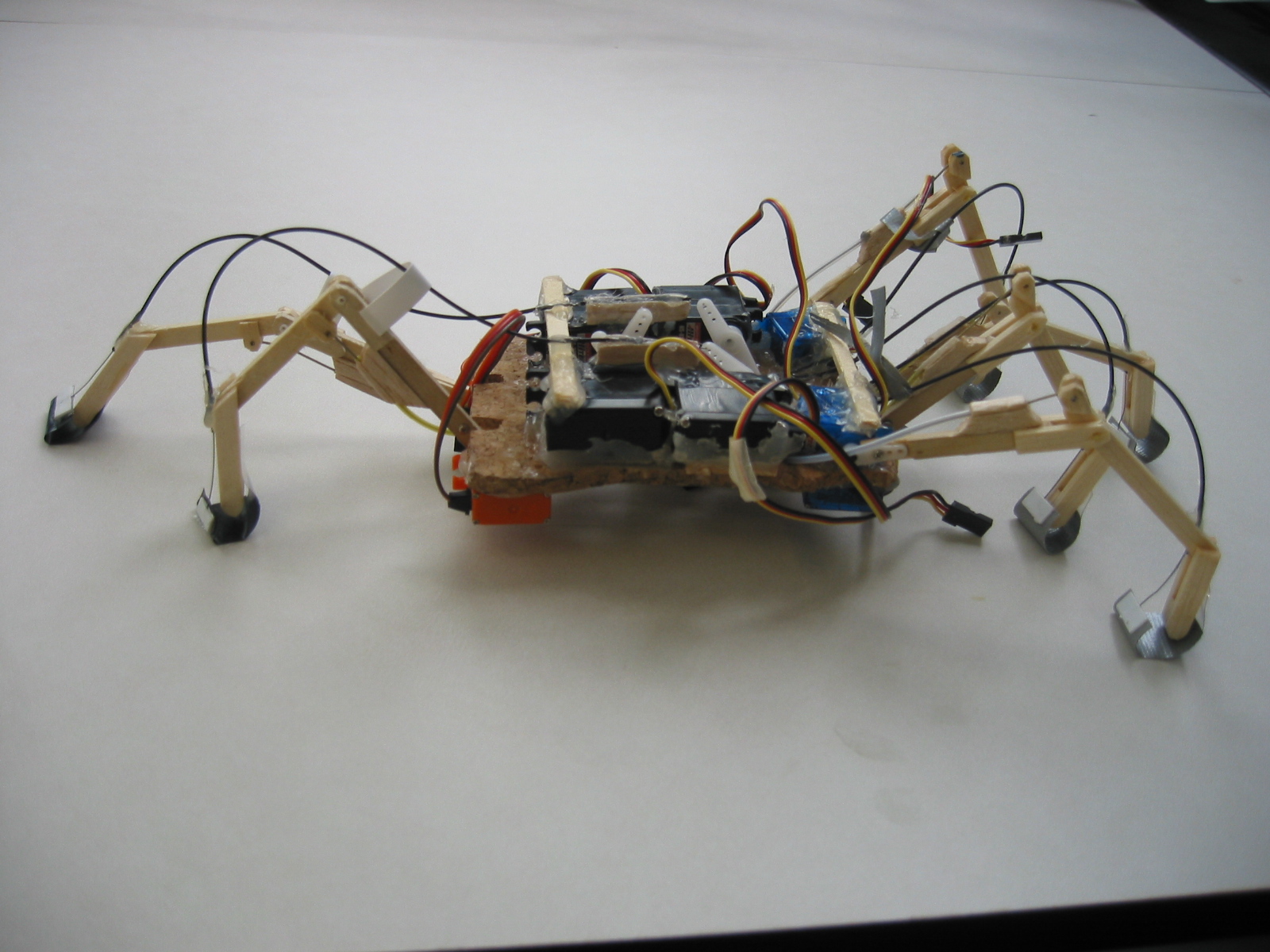
-- AlanAsbeck - Four front legs or rear legs necessary for stability -- with these legs, the CM is quite close to the feet, so it swings a lot with just 2 legs. Tires don't help.
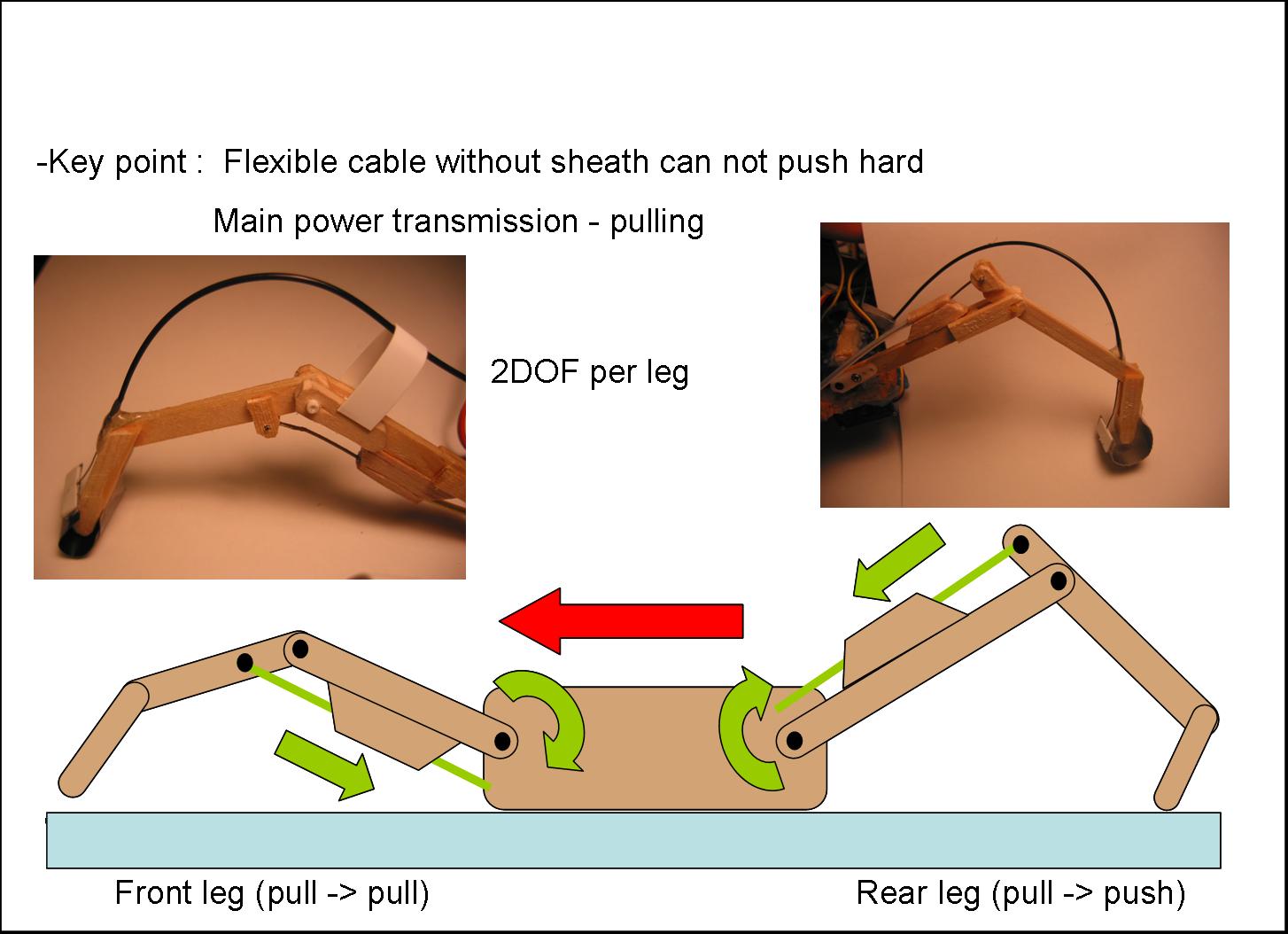
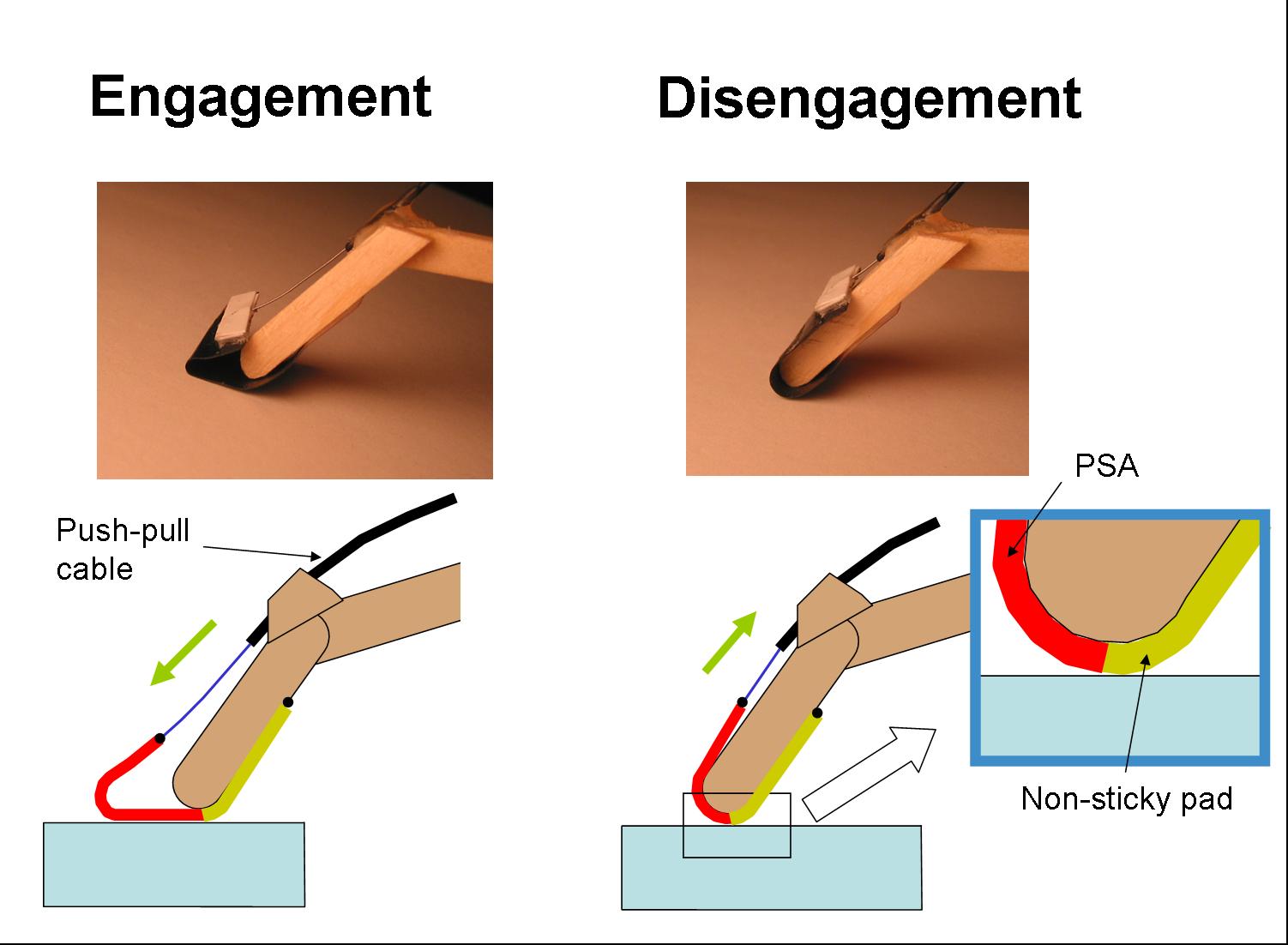
- Optimal attachment angle of the foot relative to the surface is about 60 degrees -- want to have the entire piece of tape pull off/on at this angle, not just the cable
- Lots of wasted cable pushing the sticky part onto the surface.. you have to pull it off a certain amount to ensure complete detachment, but then when you try to re-attach, the cable has to push a long ways before it actually starts attaching
- Problems with the hinged foot (that maintains a constant cable angle with the wall) with the hinge pushing back when you try to attach, so that the back part of the tape doesn't attach
- Having a piece of tape with different stiffnesses as you go along the tape may help with wasted cable
- Having springy compliance in the front legs normal to the wall allows you to convert a servo displacement into a force pushing against the wall, which is what you really want. You could probably also do a similar compliance for the rear legs to balance the forces between the front and rear legs. The other benefit of this compliance for the front legs is that the main body swings as close to the wall as possible.
- IMG_4416.JPG:
Ideas, requests, problems regarding TWiki? Send feedback