new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > StickyBot>StickyBotIII (24 May 2011, MarkCutkosky)
Rise Web>ClimbingRobot > StickyBot>StickyBotIII (24 May 2011, MarkCutkosky)

Stickybot III in front of the d.school in Peterson high resolution version |
Stickybot IIIWhat's new?Frequently Asked Questions Videos
Images
Concepts
|
{kind=link}
Overview
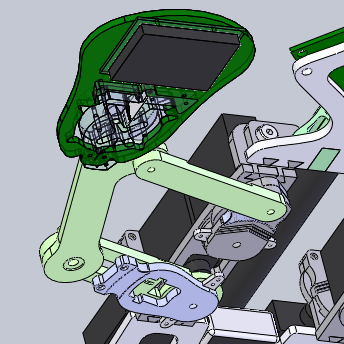
Stickybot III is the third iteration of the StickyBot platform. It has four legs, each with four degrees of freedom including actuation at the wrist to expand beyond vertical-only climbing of the first platform. Each motor has a local microprocessor-based servo controller. The feet are detachable, to allow us to interchange our various climbing technologies. Stickybot III can currently climb at 5 cm/sec. The robot has a snout-vent length of 36 cm, and the tail adds an additional 40 cm.Goals
- Reliable platform with low down-time.
- More freedom in motor actuation to allow new climbing research.
- Interchangeable feet.
- Actuation at the wrist to expand beyond vertical-only climbing.
What's New
09 Feb 2011: StickyBotIII appears in NOVA "Making Stuff: Smarter" 25 Jan 2011: Climbing with new feet and ankles: 2 MB Quicktime m4v - ElliotHawkes: 24 Aug2010: StickyBotIII and her new adhesives featured in Stanford Report, with subsequent coverage on CNN 14 Jul 2010: Several copies of AdhesiveDemonstrator made and distributed with the idea that if other adhesive technologies work on the demonstrator, they should work on StickyBotIII as well. 1 Jun 2010: After much work on new ankles, pads, etc. Stickybot-III is now climbing about as well as old StickyBot did:- SBIII on granite slab at Mitchell Bldg. (H.264, 1280x720)
- other vid. link (300 MB)
- mv4 version (95 MB)
Ideas, requests, problems regarding TWiki? Send feedback