new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > StickyBot > StickyBotIII>SB3Mechanical (03 Jul 2010, SalomonTrujillo)
Rise Web>ClimbingRobot > StickyBot > StickyBotIII>SB3Mechanical (03 Jul 2010, SalomonTrujillo)
Leg Mechanics
|
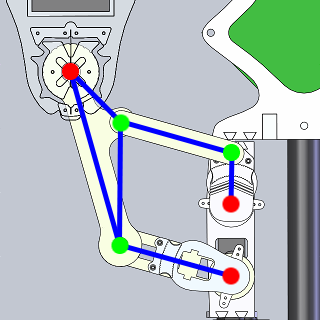
Five-bar linkageThis diagram shows the main mechanism for each leg. This mechanism rotates in and out of the plane of the screen using another "wing angle" servo motor (not shown). In the plane of the leg, we use use a 5-bar mechanism to keep the stroke and elbow servos close to the body. The red joints are active; green joints are passive. The ankle motor is intended to keep the feet aligned so that tangential forces are in the correct direction for the directional adhesives. |
|
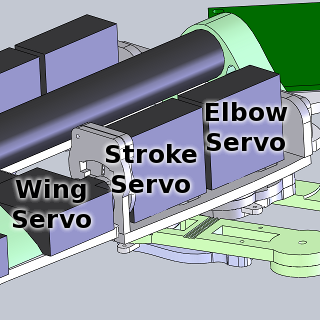
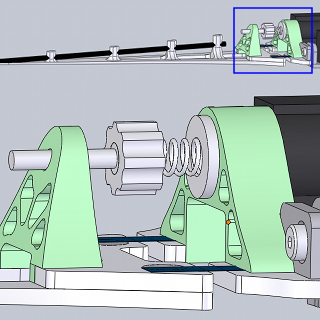
Wing servoThe wing degree-of-freedom moves the foot towards or away from the wall. The wing servo rotates a carriage that holds the stroke and elbow servos.ServosFind details to servo configuration at SB3ServoConfigurations The wing, stroke and elbow degrees-of-freedom are actuated by HiTec HS-82MG micro servos which the ankles have HiTec HS-45B servos. |
|
TailThe tail of the robot is not decorative. It is a critical component that helps reduce the pitch-back torque on the robot. The lowest point on the robot will press into the window since the center-of-mass is a significant distance from the wall. Using a tail means the back feet can act as adhesives. Without a tail, only the front feet would be adhering to the window in tension and the back feet would be in compression.Detachable tailThe tail and body are held together using strong magnets. This allows the tail to break-away during a fall, but also detach for storage as well as for demonstrations on the utility of the tail.Tail adjustThe tail's hinge has a thumb-screw to adjust the angle and interchangeable springs to adjust the stiffness. |
Ideas, requests, problems regarding TWiki? Send feedback