Categories: Perching, MultiModal, BioinspiredRobots
On this page... (hide)
- 1. Vision for Perching UAV
- 2. Ongoing Work
- 3. Publications
- 4. Multimedia
- 5. What's New?
- 6. Links
1. Vision for Perching UAV
A flock of small, unmanned air vehicles flies quietly into a city, maneuvering among the buildings. They communicate as they search for places to land, not on streets or flat rooftops but on the sides of buildings and under the eaves, where they can cling, bat or insect-like, in safety and obscurity. Upon identifying landing sites, each flier turns toward a wall, executes an intentional stall and, as it begins to fall, attaches itself using feet equipped with miniature spines that engage small asperities on the surface. Using its propeller in combination with its limbs, the flier can creep along the wall and reorient for a better view.... The fliers stay attached for hours or days, consuming little power and emitting no sound as they monitor the area. When finished, they launch themselves with a jump and become airborne again, ready for their next mission. (from Perching Whitepaper)

Small aircraft move quickly and avoid terrain-based obstacles, but use a relatively large amount of power to maintain lift. Perching on a vertical surface creates previously unavailable surveillance and maintenance abilities that include the added benefit of drawing minimum power. Vertical surfaces are abundant in urban environment, are easy to detect and provide a large surface to land on.

Sometimes the best place to land is on a wall ...
2. Ongoing Work
The current work focuses on reducing the challenges involved in landing on vertical surfaces. In order to do so, significant efforts have been dedicated to model accurately the airplane and its suspension in order to predict the conditions for successful landing (see our IJRR paper for more details).
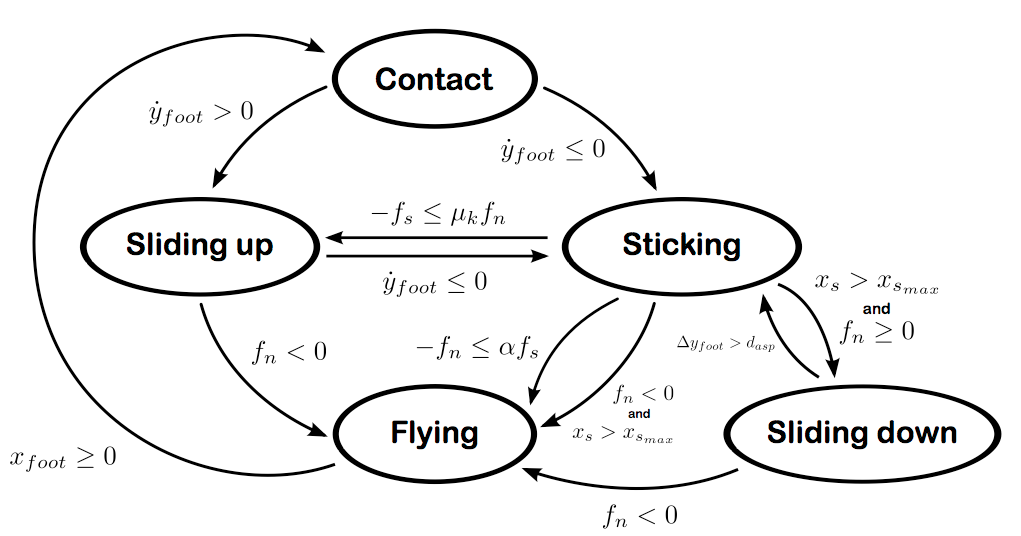
Hybrid diagram illustrating the various phases of landing.
More recently, we have been developing techniques to analyze and exploit funnels in dynamical systems in order to allow for aggressive maneuvers and generally, more robust performances. These techniques will allow us to simultaneously optimize the various parts of an hybrid system for robustness, without having to rely on brute-force techniques (i.e. discretization of the operational state space and simulations/experiments) to evaluate its performances. These effort should lead to an airplane that has been optimized and built for perching, that can perform a robust maneuver even under disturbances and can also recover from failures.
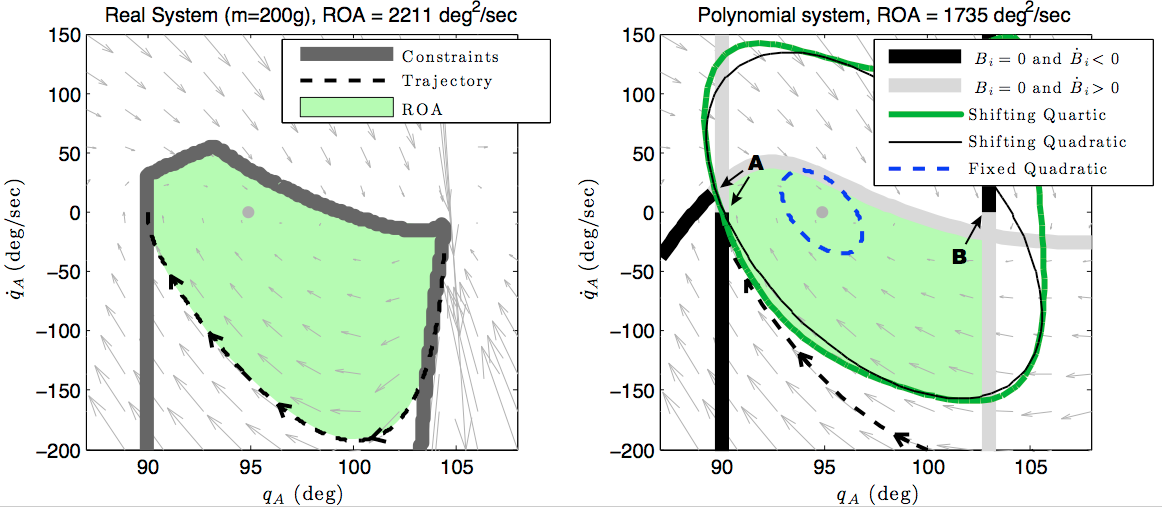
Real (left) and estimated (right) ROA for a simple perching model. The estimated ROA has been computed using a formulation (described here) that estimates close to 80% of the real ROA.
Our work on perching is also a good example of "hybrid locomotion" by combining flying and clinging to walls, which brings out the advantages of both systems. We are currently investigating other combination of other locomotion mode: skittering, flying in close proximity of the wall, jumping, gliding, etc.

Takeoff from the wall
Finally, we are interested in ways to change the behavior of a dynamical system by rapidly changing its proprieties/configuration with lightweight and low-power mechanisms. An example of that are the tunable actuators developed in our lab which should allow landing under a larger range of landing conditions.
We are investigating new PerchingControllers using the Gumstix platform.
March 2013: We are developing a number of new mechanisms for dynamic rotorcraft perching on smooth and rough surfaces. This work is part of new project under ARL MAST, in collaboration with Sean Humbert's lab at U. Maryland and a project with Russ Tedrake's lab at MIT.
July 2016: New project on VisualInspectionForPerching
3. Publications
(from PerchingPublications)
Hoffmann, K.A.W., Chen, T.G., Cutkosky, M.R., and Lentink, D., Bird-inspired robotics principles as a framework for developming smart aerospace materials, Review article for special edition on Multifunctional Composites for Autonomic, Adaptive and Self-Sustaining Systems, Journal of Composite Materials (preprint). https://journals.sagepub.com/doi/10.1177/00219983231152663
Chen, A.G., Hoffmann K, Low JunEn, Nagami, K, Lentink, D. and Cutkosky, M.R., (Aerial Grasping and the Velocity Sufficiency Region, IEEE RA Letters, 2022). -- Best Paper Award on Robot Mechanisms and Design, IEEE IROS 2022.
Roderick, William RT, Mark R. Cutkosky, and David Lentink. "Bird-inspired dynamic grasping and perching in arboreal environments." Science Robotics 6, no. 61 (2021): eabj7562.
Roderick, William RT, Diana D. Chin, Mark R. Cutkosky, and David Lentink. "Birds land reliably on complex surfaces by adapting their foot-surface interactions upon contact." Elife 8 (2019): e46415.
Jiang, Hao, Shiquan Wang, and Mark R. Cutkosky. "Stochastic models of compliant spine arrays for rough surface grasping." The International Journal of Robotics Research 37, no. 7 (2018): 669-687.
Estrada, M.A., Mintchev, S., Christensen, D.L., Cutkosky, M.R., and Floreano., D., �Forceful manipulation with micro air vehicles,� Science Robotics. 2018: doi: 10.1126/scirobotics.aau6903
Jiang, H., 2017. Surface Grasping with Bio-Inspired, Opposed Adhesion (Doctoral dissertation, Stanford University).
Roderick W.R.T., Jiang H., Wang S., Lentink D., Cutkosky M.R. (2017) Bioinspired Grippers for Natural Curved Surface Perching. In: Mangan M., Cutkosky M., Mura A., Verschure P., Prescott T., Lepora N. (eds) Biomimetic and Biohybrid Systems. Living Machines 2017. Lecture Notes in Computer Science, vol 10384. Springer, Cham. https://doi.org/10.1007/978-3-319-63537-8_56
Roderick, W. R. T., Cutkosky, M. R. & Lentink, D. (2017) Touchdown to take-off: at the interface of flight and surface locomotion. Interface Focus 7, 20160094. http://dx.doi.org/10.1098/rsfs.2016.0094
M. T. Pope; C. W. Kimes; H. Jiang; E. W. Hawkes; M. A. Estrada; C. F. Kerst; W. R. T. Roderick; A. K. Han; D. L. Christensen; M. R. Cutkosky, "A Multimodal Robot for Perching and Climbing on Vertical Outdoor Surfaces," in IEEE Transactions on Robotics , doi: 10.1109/TRO.2016.2623346
Pope, Morgan, "Creatures of two worlds : small robots and hybrid aerial-terrestrial locomotion," PhD thesis, July 2016.
Pope, Morgan and Cutkosky, Mark, "Thrust-Assisted Perching and Climbing for a Bioinspired UAV," Biomimetic and Biohybrid Systems: 5th International Conference, Living Machines 2016 (Best Paper Winner). Proceedings: Springer Lecture Notes in AI, 2016. DOI: 10.1007/978-3-319-42417-0_26
Jiang, H., Pope, M.T., Estrada, M.A., Edwards, B., Cuson, M., Hawkes, E.W., Cutkosky, M.R., "Perching Failure Detection and Recovery with Onboard Sensing," IEEE/RSJ IROS 2015 (preprint).
Wissa, A., Han, A. and Cutkosky, M.R., "Wings of a Feather Stick Together," 'Biomimetic and Biohybrid Systems, Lecture Notes in Artificial Intelligence, Wilson, S.P., Verschure, P..F.M.J., Mura, A and Prescott, T. (eds.), Springer, Vol. 9222 2015, pp. 123-134. DOI 10.1007/978-3-319-22979-9
Estrada, M.A., Hawkes, E.W., Christensen, D.L., and Cutkosky, M.R., "Perching and Crawling: Design of a Multimodal Robot," IEEE/ICRA 2014 (preprint). Best Paper Finalist
Jiang, H., Pope, M.T., Hawkes, E.W., Christensen, D.L., Estrada, M.A., Parlier, A., Tran, R., and Cutkosky, M.R., "Modeling the Dynamics of Perching with Opposed-Grip Mechanisms," accepted for IEEE/ICRA 2014 (preprint).
Hawkes, E.W., Christensen, D.L., Eason, E.V., Estrada, M.A., Heverly, M., Hilgemann, E., Jiang, H., Pope, M.T., Parness, A., and Cutkosky, M.R., "Dynamic Surface Grasping with Directional Adhesion," accepted for IEEE/RSJ IROS 2013 (preprint).
Elena Leah Glassman, Alexis Lussier Desbiens, Mark Tobenkin, Mark Cutkosky, and Russ Tedrake. Region of attraction estimation for a perching aircraft: A Lyapunov method exploiting barrier certificates. IEEE International Conference on Robotics and Automation (ICRA), St. Paul, Minnesota, May 14-18, 2012 (preprint)
Alexis Lussier Desbiens, Alan T. Asbeck and Mark R. Cutkosky, "Landing, Perching and Taking Off from Vertical Surfaces", International Journal of Robotics Research, March 2011 vol. 30 no. 3, pp 355-370.
Alexis Lussier Desbiens, Alan Asbeck and Mark R. Cutkosky, "Hybrid Aerial and Scansorial Robotics", ICRA, May 2010, Anchorage, Alaska.
- ICRA_2010.mp4: Video for ICRA 2010 showing an overview of the perching project, including both landings and takeoffs
Alexis Lussier Desbiens, Alan Asbeck and Mark R. Cutkosky, "Scansorial Landing and Perching", Proc. 14th International Symposium on Robotics Research, September 2009, Lucerne, Switzerland.
Alexis Lussier Desbiens and Mark Cutkosky, "Landing and Perching on Vertical Surfaces with Microspines for Small Unmanned Air Vehicles (UAVs)," presented at UAV'09, June 8-10, Reno, NV and included in Journal of Intelligent and Robotic Systems, Vol. 57, No. 1-4, p. 313-327 DOI: 10.1007/s10846-009-9377-z
Alexis Lussier-Desbiens and Mark Cutkosky, October 2008 whitepaper on our perching approach for small airplanes.
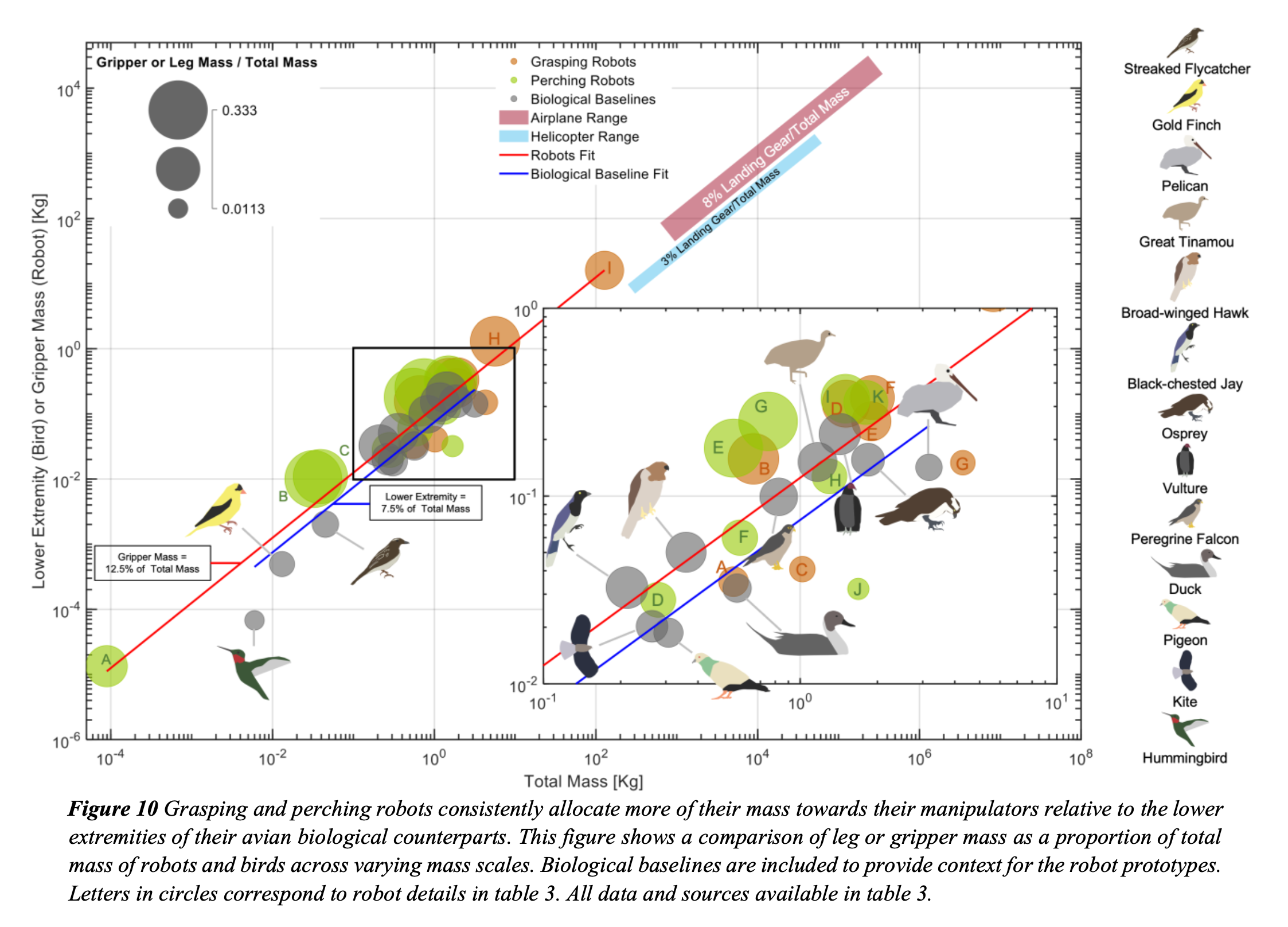
Differences in mass allocation for perching mechanisms among biological and robotic fliers (from Hoffmann et al. 2022)
4. Multimedia
(from PerchingVideos)
- Video overview of the perching project made for ICRA 2010, including both landings and takeoffs
Youtube video
- A 1st rough take-off in Stanford Quad: using a modified version of the airplane
- Thrown glider landing and perching Filmed Dec. 2008, Edited June 2009 for UAV'09 (89MB Quicktime)
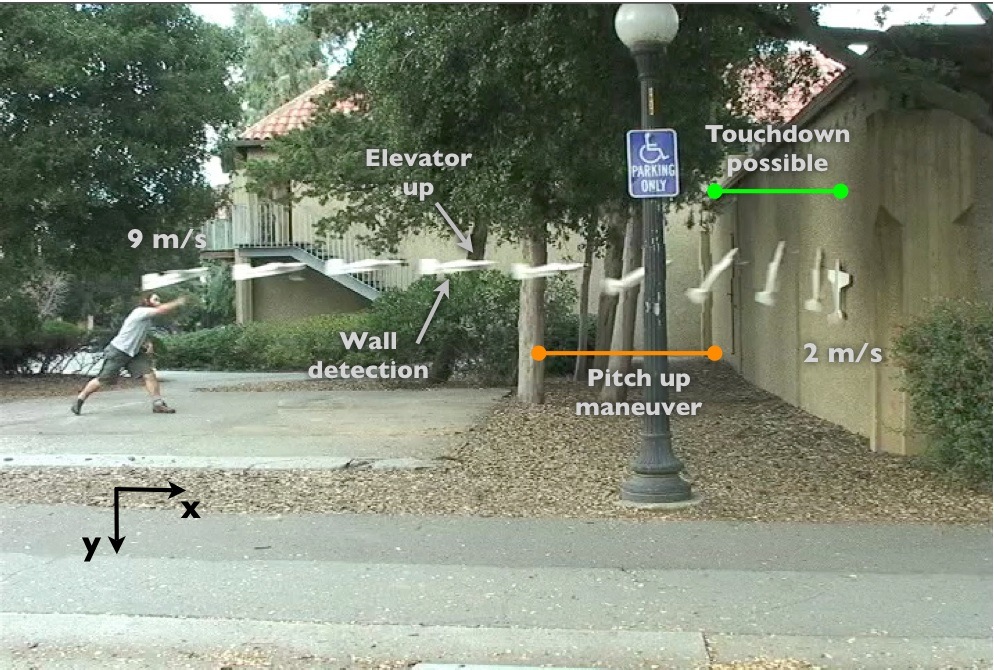
- Foam core glider is thrown at a rough concrete wall. Ultrasonic sensor initiates pitch-up maneuver at ~5m distance. Landing occurs while velocity is partly forward and partly vertical, between 1-3 m/s. Success was achieved for 30/40 throws, albeit under fairly calm conditions. For engaging and gripping the surface, we use a nonlinear suspension and a special adaptation of spiny toes from SpinyBot?
- One of the first image we have of perching. A very basic glider, manually thrown and controlled:
- Hovering with the Paparazzi open-source controller. We have achieved stable hovering with our small acrobatic plane:

5. What's New?
- January 2013 - We have a new project under ARL MAST on perching rotorcraft.
- July2012 - We are interested in systems that can fly, perch and crawl on a wall.
- July 2011 - Landing on the wall using a improved version of the airplane and a laser range finder. Fully autonomous landing with a success rate close to 100% on walls with good asperities.
- 24 Sept 2010 - Perching, Gliding and Jumping are the theme for the ME393 Seminar this fall.
- 29 April 2010 - Discovery News: Aircraft Lands on Side of Wall, Vertically
- 29 April 2010 - AOL News: Stanford Researchers Unveil Fly-on-the-Wall Spy Drone
- 28 April 2010 - Gizmodo: Incredible Perching UAV Lands On And Takes Off From Walls
- 26 April 2010 - Popular Science: Perching Drones Learn How to Land Vertically on Walls
- 26 April 2010 - BotJunkie: Perching UAV Sticks To Walls
- April 2010 - Popular Mechanics: 4 Awesome, Tiny Planes: Micro Air Vehicles Spotlight
- July 2011 - Morgan is working on some ideas for re-orienting the plane and on a cool new jumpglider.
- April 2013 - We are about to publish a paper on Jumpgliding! Here's the video: Efficient Jumpgliding
6. Links
(from PerchingLinks)
- Perching-related SBIR announcement
- DIY Drones is a useful amateur UAV site with discussions and low-cost solutions
- Tim McClain at BYU (1995 Stanford alum) has many interesting solutions for optics in UAVs
- Maximizing Miniature Air Vehicles IEEE Robotics & Automation Magazine, Sept. 2006 -- overview of UAV techniques.
- 2005 Summary paper on Autonomous Vehicle Technologies for Small Fixed-Wing UAVs
- Vision Assisted Indoor Hovering M.S. thesis, N. G. Johnson, 2008.
- Previous work on Perching: http://bdml.stanford.edu/twiki/bin/view/Main/PerchingProject