new web: http://bdml.stanford.edu/pmwiki
TWiki > Main Web>PerchingProject (05 Nov 2010, MarkCutkosky)
Main Web>PerchingProject (05 Nov 2010, MarkCutkosky)
Robots that Land and Cling on Vertical Surfaces
Private WikiVision for Perching UAV
|
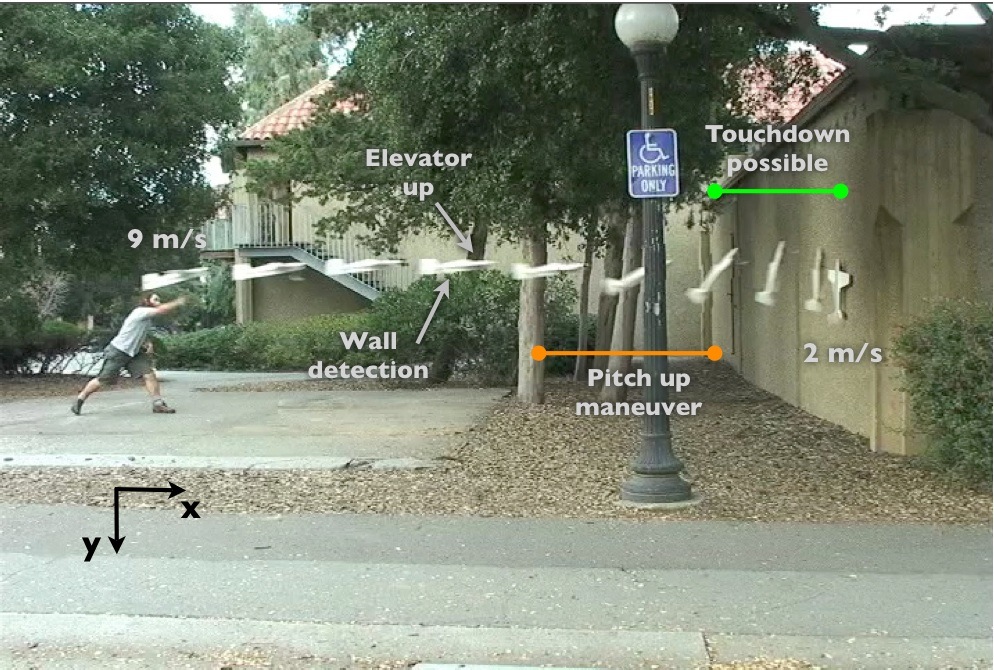
A flock of small, unmanned air vehicles flies quietly into a city, maneuvering among the buildings. They communicate as they search for places to land, not on streets or flat rooftops but on the sides of buildings and under the eaves, where they can cling, bat or insect-like, in safety and obscurity. Upon identifying landing sites, each flier turns toward a wall, executes an intentional stall and, as it begins to fall, attaches itself using feet equipped with miniature spines that engage small asperities on the surface. Using its propeller in combination with its limbs, the flier can creep along the wall and reorient for a better view. With opposed pairs of spines, the flier clings tenaciously to resist gusts of wind and ride out inclement weather. The fliers stay attached for hours or days, consuming little power and emitting no sound as they monitor the area. When finished, they launch themselves with a jump and become airborne again, ready for their next mission. (from Perching Whitepaper)
|
Publications(from PerchingPublications) Alexis Lussier Desbiens, Alan T. Asbeck and Mark R. Cutkosky, "Landing, Perching and Taking Off from Vertical Surfaces," published online before print, International Journal of Robotics Research, Jan. 2011. Alexis Lussier Desbiens, Alan Asbeck and Mark R. Cutkosky, "Hybrid Aerial and Scansorial Robotics", ICRA, May 2010, Anchorage, Alaska (preprint).
|  |
|
VideosICRA_2010: Video overview of the perching project made for ICRA 2010, including both landings and takeoffs MVI_0862.AVI: a 1st rough take-off in Stanford Quad Thrown glider landing and perching Filmed Dec. 2008, Edited June 2009 for UAV'09 (89MB Quicktime)
|
ControlWe are basing our control on the Paparazzi open-source controller. Thus far we have achieved stable hovering with our small acrobatic plane. The next step is controlled lift-off after perching... |
 |
What's New?
- Oct, Nov 2010 ElenaGlassman has a page: ElenaStanfordPage
- 24 Sept 2010 - Perching, Gliding and Jumping are the theme for the ME393 Seminar this fall.
- 29 April 2010 - Discovery News: Aircraft Lands on Side of Wall, Vertically
- 29 April 2010 - AOL News: Stanford Researchers Unveil Fly-on-the-Wall Spy Drone
- 28 April 2010 - Gizmodo: Incredible Perching UAV Lands On And Takes Off From Walls
- 26 April 2010 - Popular Science: Perching Drones Learn How to Land Vertically on Walls
- 26 April 2010 - BotJunkie: Perching UAV Sticks To Walls
- April 2010 - Popular Mechanics: 4 Awesome, Tiny Planes: Micro Air Vehicles Spotlight
Links
- PerchingLinks
- Perching-related SBIR announcement
- DIY Drones is a useful amateur UAV site with discussions and low-cost solutions
- Tim McClain at BYU (1995 Stanford alum) has many interesting solutions for optics in UAVs
- Maximizing Miniature Air Vehicles IEEE Robotics & Automation Magazine, Sept. 2006 -- overview of UAV techniques.
- 2005 Summary paper on Autonomous Vehicle Technologies for Small Fixed-Wing UAVs
- Vision Assisted Indoor Hovering M.S. thesis, N. G. Johnson, 2008.
Ideas, requests, problems regarding TWiki? Send feedback