new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>TWikiUsers > JiLee>DanaAndJiExperiments (09 Jul 2004, DanaUng? )
Rise Web>TWikiUsers > JiLee>DanaAndJiExperiments (09 Jul 2004, DanaUng? )
Questions we are trying to answer
Front leg case
- what is the minimum normal force (depends on 'amplitude') that will give me a reasonable amount of upward traction?
- what is 'a reasonable amount' of upward traction?
- what trajectory in terms of attachment/detachment timing gives me the best traction for a given normal force?
- what kinds of adhesion forces can I obtain (pull-away force for detachment)
- if the leg is attached, can I reduce the amplitude (i.e., pulling away from the wall a bit) and have the leg not pop off? (This would be a sign of adhesion.)
- what is the desirable amount of "pull in" force?
Rear leg case
- what trajectory in terms of attachment/detachment timing gives me the best traction for a given normal force?
Lamellae Foot Test with Toes
Phase 1
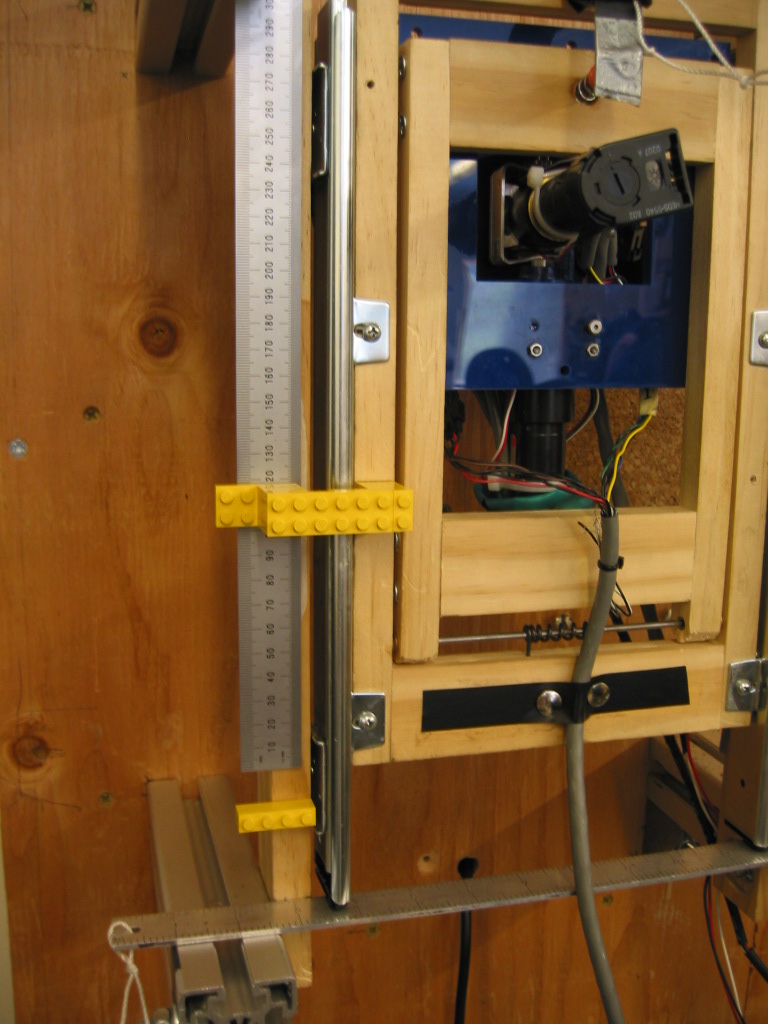
Location: \\Chewie\users\Climbing\TestTrackData\lamellae foot Parameter setting and procedues: PreliminaryTestTrackExperimentv2.doc: preliminary test track experiment 1. Soft Lamellae foot (complete data with accelerometer)- steptest_amplitude(deg): 20 (how far the hip or "wing" angle moves; brings the foot down far enough into the wall that we make good contact)
- calib_offset3(deg): 18 (offset is wing angle at which it starts)
- SoftLamellaeData
- steptest_amplitude(deg): 15 (how far the hip or "wing" angle moves)
- calib_offset3(deg): 23 (offset is wing angle at which it starts)
- HardLamellaeData
Test parameter variables
-- JiLee Jun 28 2004| Set(3 trials each set) | Attachment | Detachment |
|---|---|---|
| A (SETA.dat) | Really Early: time_offset = 1.10 | Early: duration = 1.10 |
| B (SETB.dat) | Nominal: duration = 1.30 | |
| C (SETC.dat) | Late: duration = 1.50 | |
| D (SETD.dat) | Early: time_offset = 1.30 | Early: duration = 0.90 |
| E (SETE.dat) | Nominal: duration = 1.10 | |
| F (SETF.dat) | Late: duration = 1.30 | |
| G (SETG.dat) | Nominal: time_offset = 1.40 | Early: duration = 0.80 |
| H (SETH.dat) | Nominal: duration = 1.00 | |
| I (SETI.dat) | Late: duration = 1.20 | |
| J (SETJ.dat) | Late: time_offset = 1.50 | Early: duration = 0.70 |
| K (SETK.dat) | Nominal: duration = 0.90 | |
| L (SETL.dat) | Late: duration = 1.10 | |
Observations for the Soft Foot
-- DanaUng, JiLee Jun 30 04- what is the minimum normal force (depends on 'amplitude') that will give me a reasonable amount of upward traction?
- what is 'a reasonable amount' of upward traction?
- This requires the analysis of accelerometer data. (still to be done)
- what trajectory in terms of attachment/detachment timing gives me the best traction for a given normal force?
- It appears that sets E, F, H, and K give the best traction - their coresponding attachment and detachment times can be seen in the table above.
- We will do more refined tests on these sets.
- what kinds of adhesion forces can I obtain (pull-away force for detachment)
- The maximum positive z force (out of the page) occurs in data set B (1.838 N) and the minimum occurs in data set K (1.019 N). However, these forces occur when the claw penetrates the cork surface, therefore they are most likely caused by the bouncing of the cork or possibly other reactions. Hardly any adhesion forces were observed.
- if the leg is attached, can I reduce the amplitude (i.e., pulling away from the wall a bit) and have the leg not pop off? (This would be a sign of adhesion.)
- This requires a more specific experiment. However, considering that hardly any adhesion forces could be observed in the data sets we have obtained, possibly no sign of adhesion is to be observed.
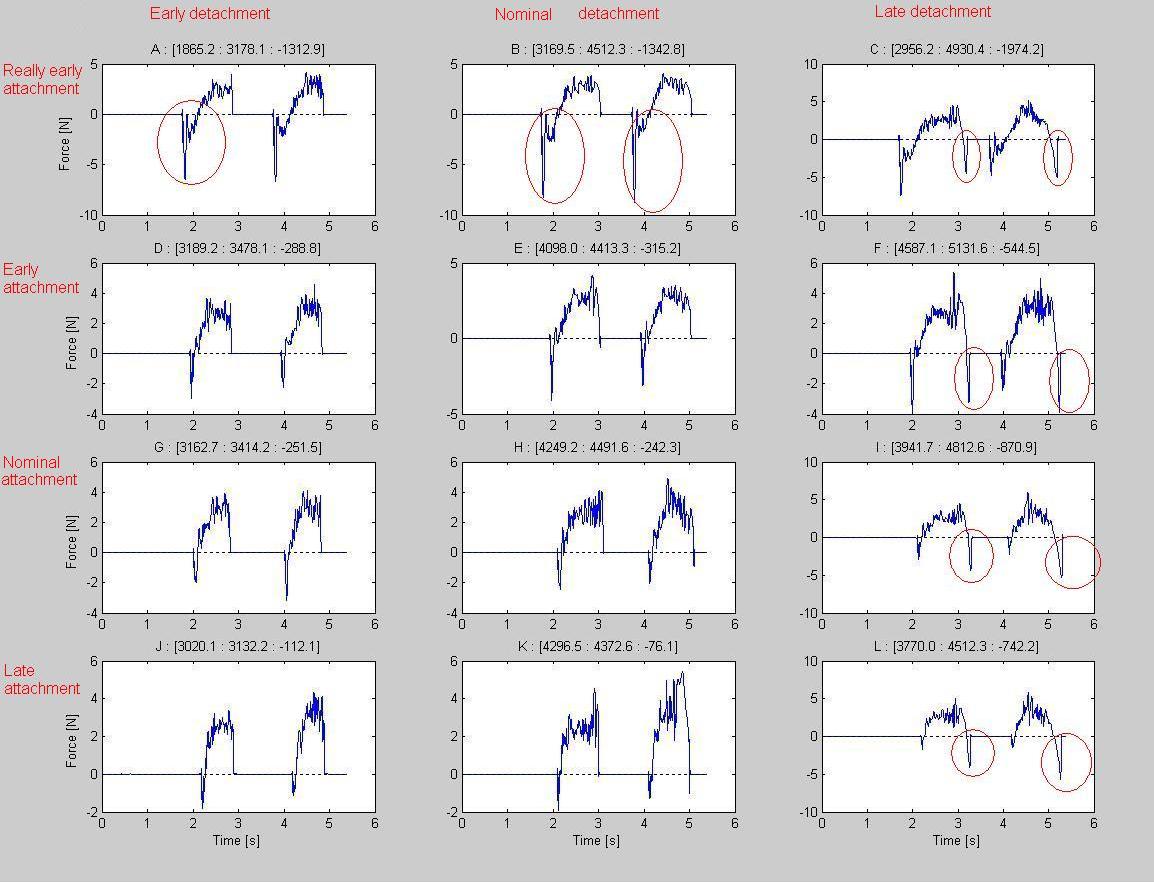
It can be seen from the plotted data that "really early attachment" (data sets A, B, and C) and "late detachment" (C, F, I and L) are undesirable because they result in relatively large negative y forces (downwards). It is worth noting that these huge dips in the Fy curves occur at different points on the curves. Fy
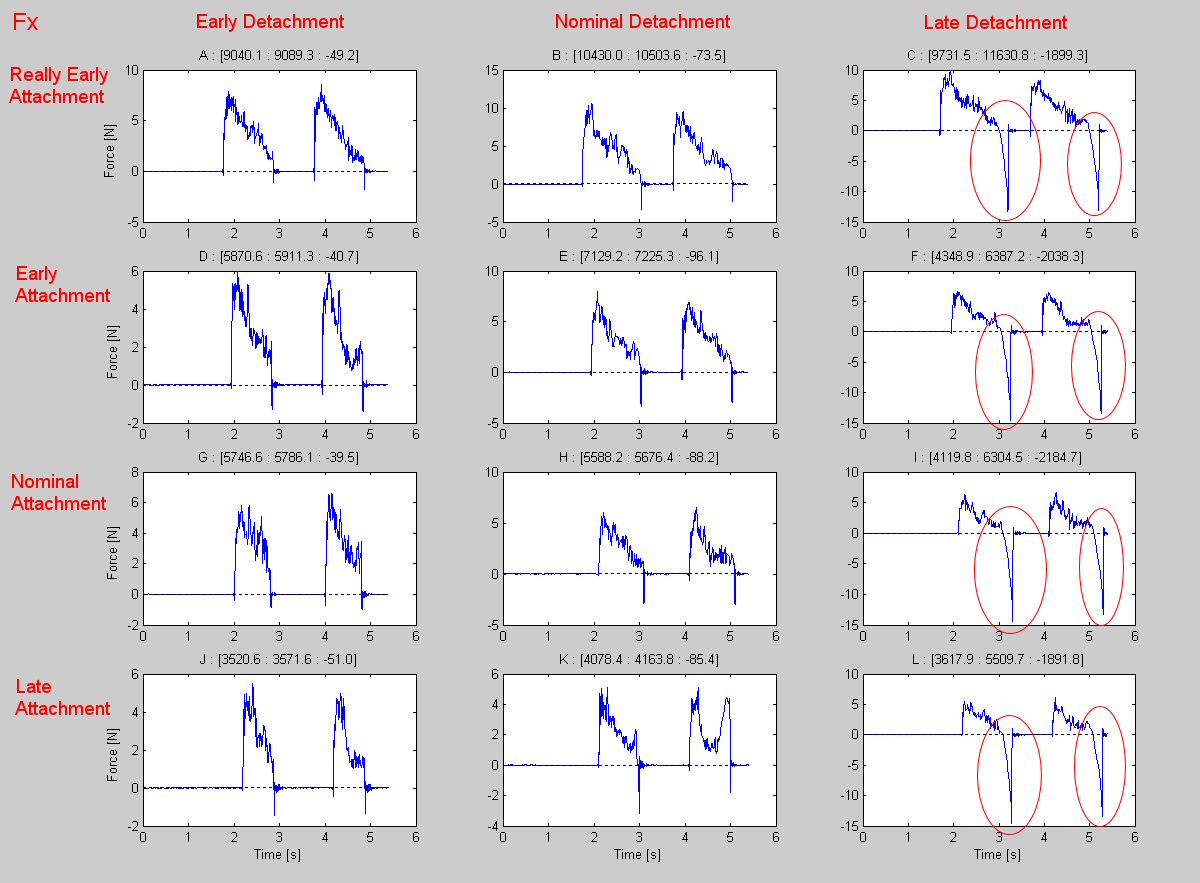
 The data sets for Fx (positive X pointing to the left) also display huge dips at the end of the cycle for late detachment. This seems reasonable because for late detachments after the leg has travelled vertically down, the foot is still engaged into the surface as it rotates counterclockwise to move back up, thereby forced to dig in the negative x direction and also into the surface. This creates a huge negative force spike on the graph.
Fx
The data sets for Fx (positive X pointing to the left) also display huge dips at the end of the cycle for late detachment. This seems reasonable because for late detachments after the leg has travelled vertically down, the foot is still engaged into the surface as it rotates counterclockwise to move back up, thereby forced to dig in the negative x direction and also into the surface. This creates a huge negative force spike on the graph.
Fx
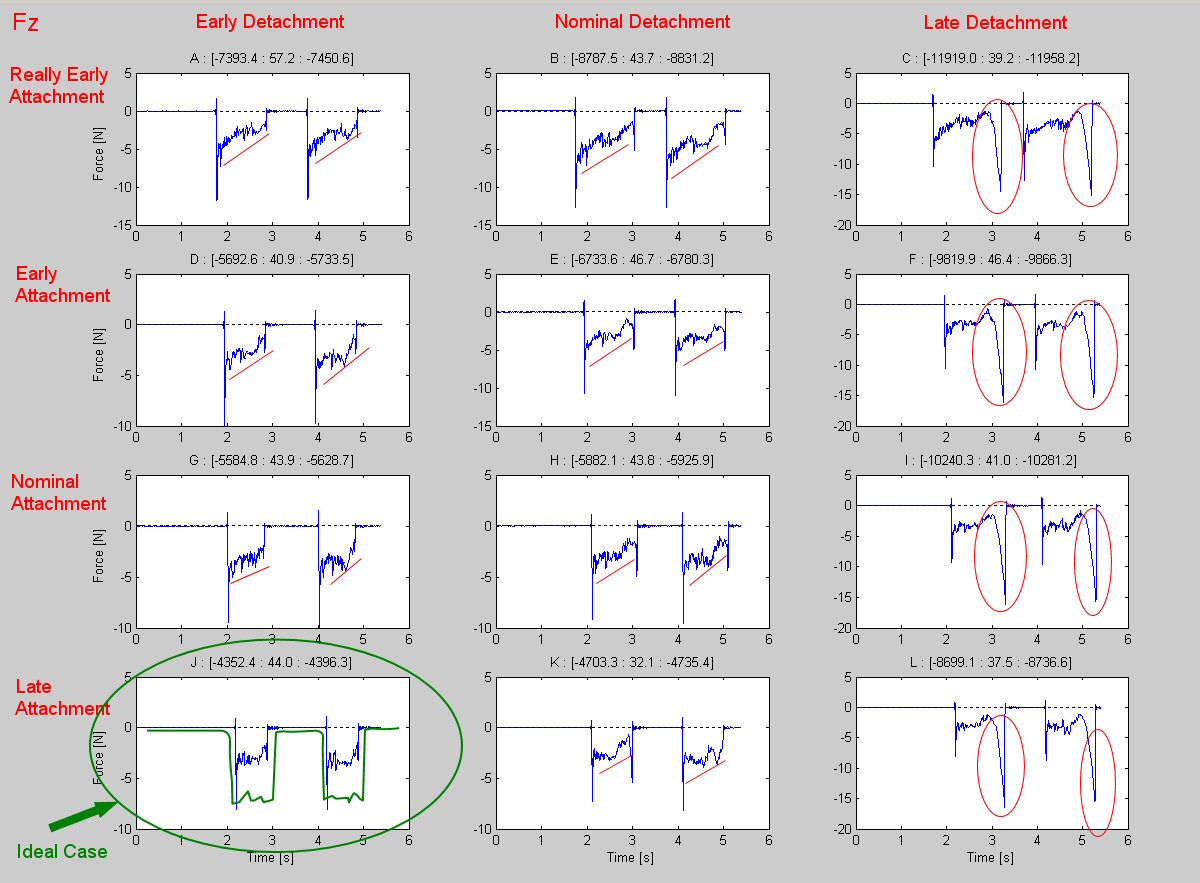
 The initial spikes in the graphs of Fz(positive Z pointing out of the surface) can be attributed to the inertia of foot as it attaches. However, for the late detachments (C, F, I and L), there are additional dips at the end of every cycle. These dips are due to the same reasons as the ones observed in the graphs of Fx where the foot has remained engaged as it went around back to it initial position.
The overall normal force (negative Fz) is not constant during the cycle, but rather decreases, unlike what is to be expected in ideal cases. In ideal cases, the normal force is to be kept constant.
It can be seen that data set J (late attachment and early detachment) keeps a quite constant normal force throughout.
Fz
The initial spikes in the graphs of Fz(positive Z pointing out of the surface) can be attributed to the inertia of foot as it attaches. However, for the late detachments (C, F, I and L), there are additional dips at the end of every cycle. These dips are due to the same reasons as the ones observed in the graphs of Fx where the foot has remained engaged as it went around back to it initial position.
The overall normal force (negative Fz) is not constant during the cycle, but rather decreases, unlike what is to be expected in ideal cases. In ideal cases, the normal force is to be kept constant.
It can be seen that data set J (late attachment and early detachment) keeps a quite constant normal force throughout.
Fz
According to the data, the overall Fx is about 6 to 7 N Fy is about 4 to 5 N Fz is about 5 N Total lateral
 N. The data shows that the total lateral force is greater than the overall normal force.
However, the data on lizards shows that the overall force in y is greater than that in x. Also, it shows that lateral force is greater than normal force.
N. The data shows that the total lateral force is greater than the overall normal force.
However, the data on lizards shows that the overall force in y is greater than that in x. Also, it shows that lateral force is greater than normal force.
Conclusion
- The current trajectory and the foot design result in higher lateral forces than normal forces.
- The lateral force in the X direction is greater than that in the Y direction. Changes in parameters are necessary to make the force in the Y direction greater.
- More refinement of the trajectory may be required for constant normal force - to do this it seems we need to have a varying wing angle rather than a constant one.
- Very careful timing for attachment and detachment is crucial. Otherwise, huge force spikes and dips occur.
- Data sets E, F, H and K show the most upward traction (greatest positive Y force and smallest negative Y force).
What is to be done
- Retests on the data sets
- Test with friction material only without the toes for simpler analysis
- Test with dactyl foot
Phase 2
Retest on set A, B, E, F, H and K
- This test allows us to verify whether the data sets we have obtained are reliable and in turn, will enable us to determine which set of parameters give the most upward traction among these four best sets E, F, H and K (refer to the table above).
- A setup that accurately measures the distance the foot climbs is added.
 1. Soft Lamellae foot retest(complete data with accelerometer)
1. Soft Lamellae foot retest(complete data with accelerometer)
- steptest_amplitude(deg): 20 (how far the hip or "wing" angle moves; brings the foot down far enough into the wall that we make good contact)
- calib_offset3(deg): 18 (offset is wing angle at which it starts)
- SoftLamellaeRetestData
Observation
Lamellae Friction Material Test
Dactyl Foot Test
Questions we are trying to answer
- Given the normal force is the same, how effective is the dactyl foot compared to the lamellae foot?
- What are the attachment and detachment timings that result in the most upward traction?
- what is the desirable amount of "pull-in" force?
Pin Adhesion
We did some pin adhesion tests to find how much adhesion we could get for single pins on cork. This is a very simple experiment, and although it does not control many variables, it gives us a good idea as to the general magnitude of the adhesion force of a single pin. We stuck the pin into the cork at a 45 degree angle and pulled normal to the axis of the pin until the cork broke.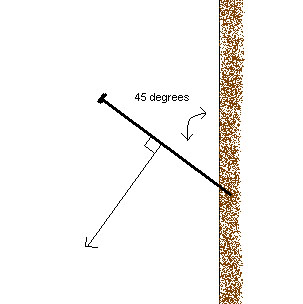
 The data tells us that the maximum adhesion force of the pin is approximately 4N.
The data tells us that the maximum adhesion force of the pin is approximately 4N. 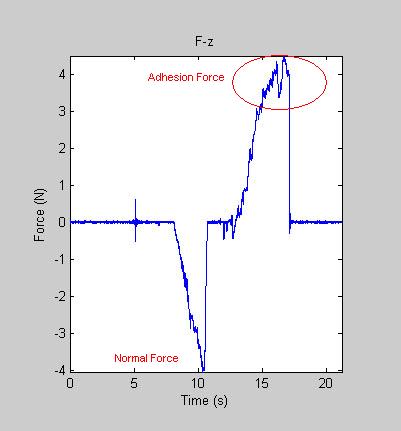
testing math.... See MatlabTrajectoryAnalysis for more about
 vs.
vs.  and
and  vs. trajectories
vs. trajectories Ideas, requests, problems regarding TWiki? Send feedback