new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > ProjectManagement > MeetingNotes>FootDesignIdeas (25 Jul 2003, WillP? )
Rise Web>ClimbingRobot > ProjectManagement > MeetingNotes>FootDesignIdeas (25 Jul 2003, WillP? )
Foot Design Ideas Meeting (07/15/2003)
Moto's biology summary presentation for McGill? visit: http://www-cdr.stanford.edu/~motohat/presentation/montrealideation01.ppt Also see the robot foot design webpage: http://www-cdr.stanford.edu/~wil/robotFeet.htmlCategorization and characterization of Biological Inspiration
| Adhesion Mechanisms | Claws | Dry Adhesion | Wet Adhesion | Skin Friction |
|---|---|---|---|---|
| Range of Animals | Bear ~500kg Cats ~5kg Squirrel Birds Lizards Insects ~1g |
Jumping Spiders < 1g Gecko ~20g |
Mollusks 5g Insects Tree frogs 20g |
Human Squirrel |
| Capabilities/Limitations | Wide weight range No smooth, hard surfaces |
Mid-range work on smooth surface |
Light animals Usually hard, smooth surfaces |
Smooth surface Hug/grasp/dynamic |
| Method | Penetrate Hook onto surface features |
Fine hair local structural compliance (fingers) |
oil, mucus, waxy/greasy large surface area capillary action |
friction normal force (fan/wings) contact area |
| Maintenance | Sharpen | Clean | Supply | Abrasion resistance? Skin regrowth? |
| To find out | Claw geometry |
How much fluid required per weight? surface area/weight (will a small amount of wet adhesion help here?) thickness of thin film viscosity |
Friction coefficient | |
| Strategy | Engage, pull inward | Shearing disengage by peeling Local compliance |
soft feet to keep film thin (local compliance) |
Find geometry to climb convex/concave suction |
Idea generation
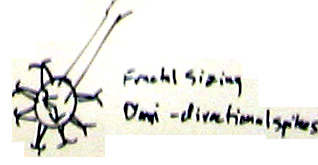
JonathanClark- Fractal sized claw ends (omni-directional spikes)
- Bear claw (if central sticky pad slips, bear claw snaps shut)
- Graduated claw size for various rough terrain
- Breakable blades; as blades get dull they break away to expose new blade
- Helical claw (corkscrew)
- Spring aided impact to engage claw, replacement claw storage on each footstep: "Nail gun approach"
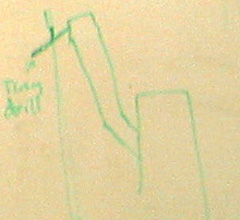
- Drill into surface
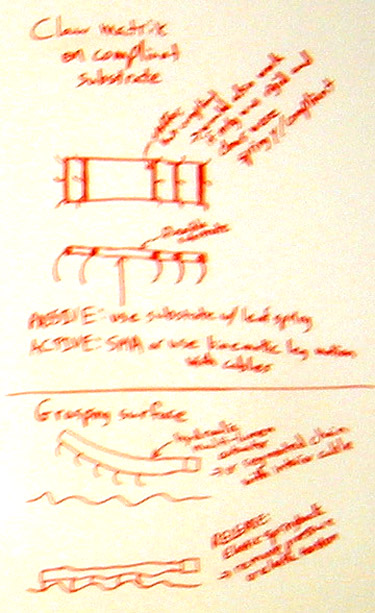
- Claw matrix on compliant substrate
- Grasping surface (hydraulic multi-lumen actuator or a series of links with interior cable); elastic retraction
- Compliant substrate for gecko hair to be a sort of "memory foam" (i.e. not strong elastic springback, generally holds shape it is pressed into; like space-age mattress or foam ear plugs)
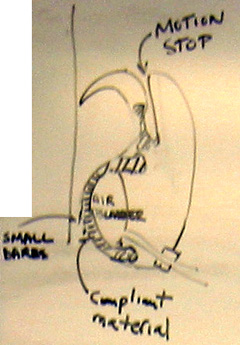
- Compliant air bladder with small mounted barbs (SDM version of "cat claw")
- Dry Adhesion tripod (compliant tripod, then local compliance on each toe)
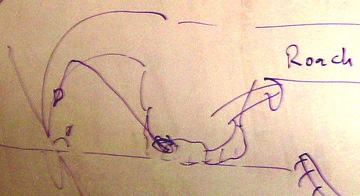
- While looking at cockroaches, noted redistributed direction of leg forces
- Cockroach foot: actuated tarsus w/ claws; springy pads farther up (similar to cockroach euplantulae)
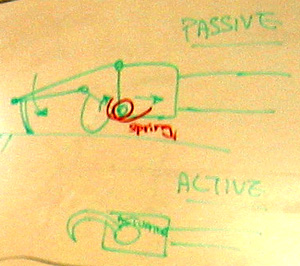
- While playing with Will's prototype of springy foot:
- PASSIVE engagement scraped away the substrate (claws leave grooves as they slide along surface), leaving smaller surface anomalies to grab onto
- ACTIVE engagement left the surface as is; leaving larger surface anomalies to grab onto; a potential argument for active engagement?
- Hydraulic reservoir to provide compliance for vertical-sliding claws
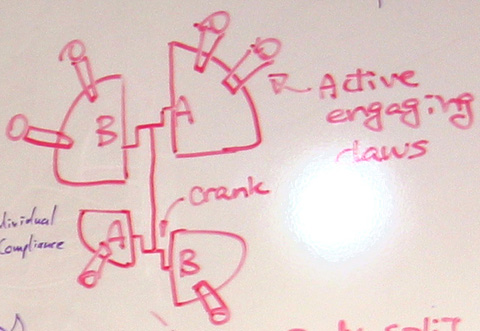
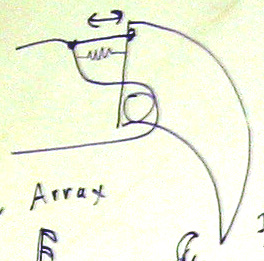
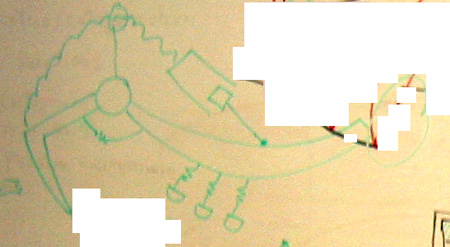
- Inter-connecting crank mechanisms between two feet with active engaging claws
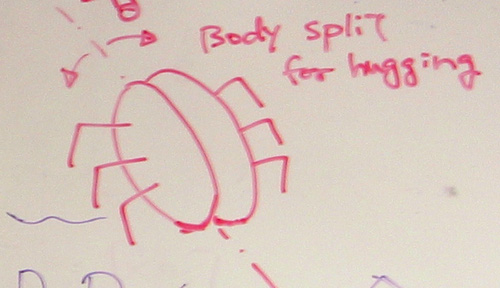
- Longitudinal body split for hugging
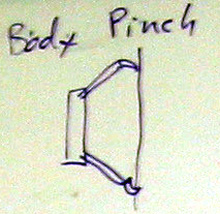
- Foot-pinch vs. body pinch
- Self-sharpening layered claw (harder central material, softer material wears away gradually)
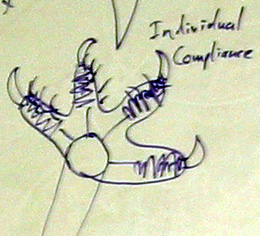
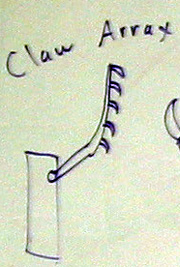
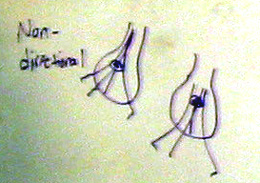
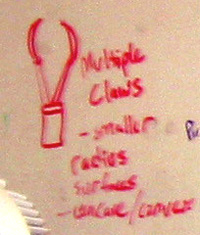
- Claw array: unidirectional claw matrix vs. individual compliance of claws at various angles (radial array) to provide stability and to engage surface anomalies not lying along the climbing direction
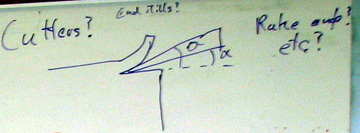
- Cutter technology: rake angles for end mills (angles affect if cutter bites into material or bounces away)
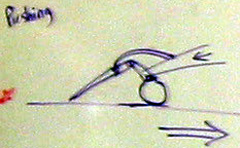
- Claw for pushing
- Bladder with some adhesion, radially arrayed claws that extend if it slips
- longitudinally split body to hug surface to climb (moto):
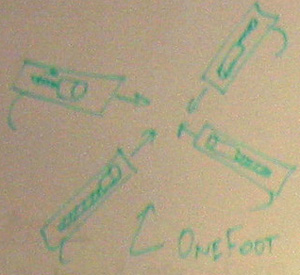
- alternating feet (moto):
- passive sprung clawed foot (dan):
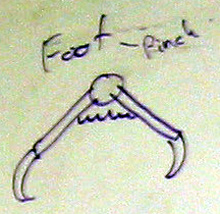
- pinch wall with opposed claws (dan):
- hinged claw (dan):
- foot with toes that have individual compliance (dan):
- claw array (dan):
- bladder with radial claws (Trey):
- Self-sharpening layered claw (harder center) (Dan):

- Claw for pushing (Trey):
- graspingClaw.jpg:
- Cutter technology: rake angles for end mills (dan):
- plant back of foot and then engage surface w/ toe (jonathan):
- Compliant substrate for gecko hair (Sangbae):
- active/passive claw matrix:
- claw with graduated sizes of claws (jonathan):
- bear trap with sticky tongue? (jonathan):
- briar/velcro type attachment (jonathan):
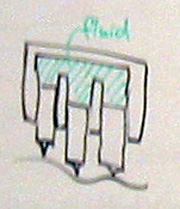
- claws w/ fluid reservoir to equalize pressure (sea:
- plant back of foot & engage surface w/ toe (sean):
- radially sprung toes (sean):
- drill into wall to gain foot holds (miguel):
- passive and active claw engagement (moto+?):
- complant pad with small barbs on edges (will):
Ideas, requests, problems regarding TWiki? Send feedback