Sal, Thanks for doing this. It looks great! More comments interspersed below. MarkCutkosky 3-10-05
%ENDCOMMENT%
Outer Spine K:
0.1639
-0.0813
0.2993
-0.0813
0.7256
-0.2778
0.2993
-0.2778
0.8971
Inner Spine K:
0.1421
-0.0204
0.2458
-0.0204
0.1582
-0.0112
0.2458
-0.0112
0.5774
Units:
N / cm
N / cm
N / rad
N / cm
N / cm
N / rad
N / rad
N / rad
N cm / rad
Discussion
This is a break-down of the different characteristics of the SpinyBot toe:
kxx must be very small for -x displacements:
Confirmed: kxx is on the order of 0.15 N / cm, for -x.
kxx must be very large for +x displacements:
I think is maybe overstating things. It needs to be large enough that the robot will not sag away from the wall once the spine is engaged. %ENDCOMMENT%
Undetermined: the experiments are very difficult to perform in the +x direction since the spine is pressed against a scale. However, testing the toe with one's finger shows that +x direction streching is stiff, but qualitative results are not availible
kyy should be moderate.
Confirmed: kyy is much larger for the outer spine. Surprisingly, the kyy for the inner spine is on the same order as kxx, but the value is still moderate.
kxy should be small and non-negative (to prevent retraction of the x-spine during y loading)
The non-negative is an ideal desire... %ENDCOMMENT%
Partial: kxy is quite small, but it is not non-negative. There is one sidenotes about this result. The stiffness matricies are generated by inverted a symmetry-enforced compliance matrix. If we examine the original non-symmetric compliance matrix, we find that for y-axis forces, there is a small positive displacement for the inner spine and a small negative displacement for the outer spine. Thus, it appears that the inner spine is exhibiting the desired behavior.
This is interesting. Also brings up the limitation of a linear constant-stiffness model for this kind of model in which, for example, the +x stiffness is quite different from the -x stiffness. Indeed, a better model is needed. Is there something short of a full numerical simulation that would provide some analytic insight? Same comment applies to the result just below. %ENDCOMMENT%
While a full numerical simulation would be quite valuabe, I think a simpler approach would be to find different stiffness matricies, linearized around a couple different points such as unloaded and loaded under the weight of the robot. The stiffness matricies above are linearized around [-0.5" x, 0.5" y]. Linearizing around [0, 0] and [+0.5" x, 0.5 y] are also points of interest, but it would be very difficult to do so with the current setup. -- SalomonTrujillo - 10 Mar 2005%ENDCOMMENT%
kxtheta should be small and negative
Undetermined: kxtheta is significant, but they also have very large curl components. During symmetry enforcing, much of the information about these terms is lost. This may be due to the buckling flexures and the non-linearities of forces in the x-axis. Nevertheless, a possible failure mode of the spine might be due to spine rotation due to x-axis forces.
kytheta should be small and negative
Confirmed: This result is more important than the kxtheta term since the toes are heavily loaded in the +y direction. The stiffness matricies imply that the spine rotate to dig into the climbing surface.
Methods
The SpinyBot toe's compliance was measured by applying loads to each of the spines and watching the displacement. These loads are generated by pressing the spines of the toe against a scale. The position of the spine is constrained in the direction normal to the scale, but not parallel to the scale. The load on the scale is recorded, as well as the positions of the hard utherane members. The toe is displaced a maximum of 0.1 inches at 0.01-inch increments. The forces and displacements are then linearized. This method is repeated for both spines and for three different loading directions (-x, +y and -x & +theta). These three directions allow us to solve for a non-singular K. Due to errors, the K has a curl component. Thus, symmetry is forced by holding that K = (1/2)(K' + K' transpose).
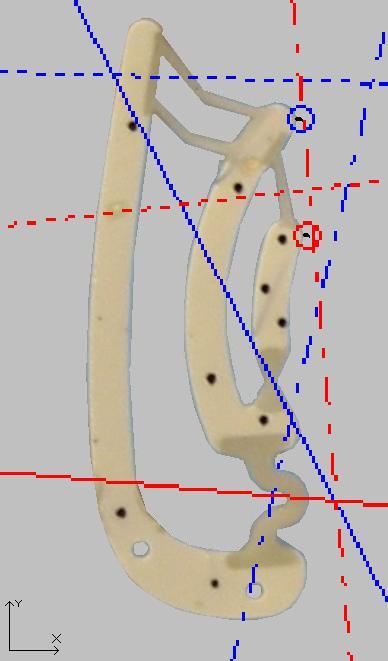
Prinicipal Springs of Spinytoe
I am a little unclear what the lines are... are they the virtual lines of action of equivalent springs for the associated loads? %ENDCOMMENT%
Sorry, I should have put in a better description. Yes, they are the virtual lines of action for the prinicpal springs, i.e. the eigenvectors of the stiffness matricies. Below are the principal stiffnesses, i.e. the eigenvalues. The eigenvector has the x and y spring components, plus a torsional spring component. I represented the torsonial spring component by offseting the line from the spines such that the force produces a torque around the spine and no addition torsonial spring is need. -- SalomonTrujillo - 10 Mar 2005 %ENDCOMMENT%
Outer Spine:
Solid blue: 1.19 N/cm
Dashed blue: 0.54 N/cm
Dotted blue: 0.06 N/cm Inner Spine:
Solid red: 0.6887 N/cm
Dashed red: 0.16 N/cm
Dotted red: 0.03 N/cm
 Rise Web>ClimbingRobot > ClimbingConcepts > SpinedSurfaces > SpinyBot>SpinyBotIIToeComplianceDetails (11 Mar 2005, SalomonTrujillo)
Rise Web>ClimbingRobot > ClimbingConcepts > SpinedSurfaces > SpinyBot>SpinyBotIIToeComplianceDetails (11 Mar 2005, SalomonTrujillo)