new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>TWikiUsers > AlanAsbeck>QuadStateProblems (21 Jul 2006, AlanAsbeck)
Rise Web>TWikiUsers > AlanAsbeck>QuadStateProblems (21 Jul 2006, AlanAsbeck)
Problems with my state-based gait stuff for RiSE. The following was logged using low gains:
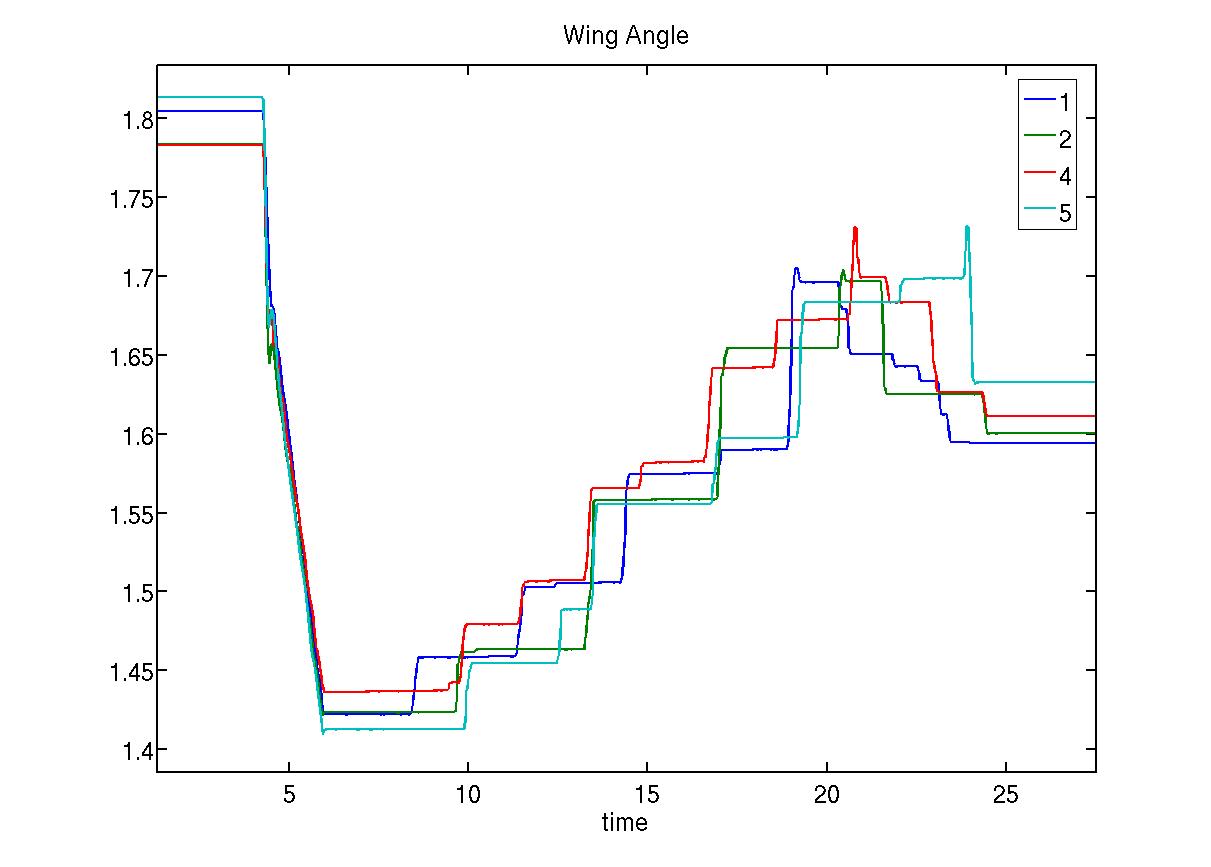
StartupTransition in TransitionClasses.cc. Then, once it finishes the StartupTransition and the wings get to 1.5, the wings are supposed to lift up until they get to a value of 1.7. The wings always correctly do the StartupTransition and get to the initial positions of 1.5. Then, they start oscillating wildly if the gains are set to 10 and 0.5. If the gains are set to 5 and 0.25 like in this trial, they move slowly up, but with very jerky motions, staying still for a long time then moving up a centimeter or so. In the plots below, don't worry about what happens after the legs get to a wing value of 1.7 (after t=18 or so).
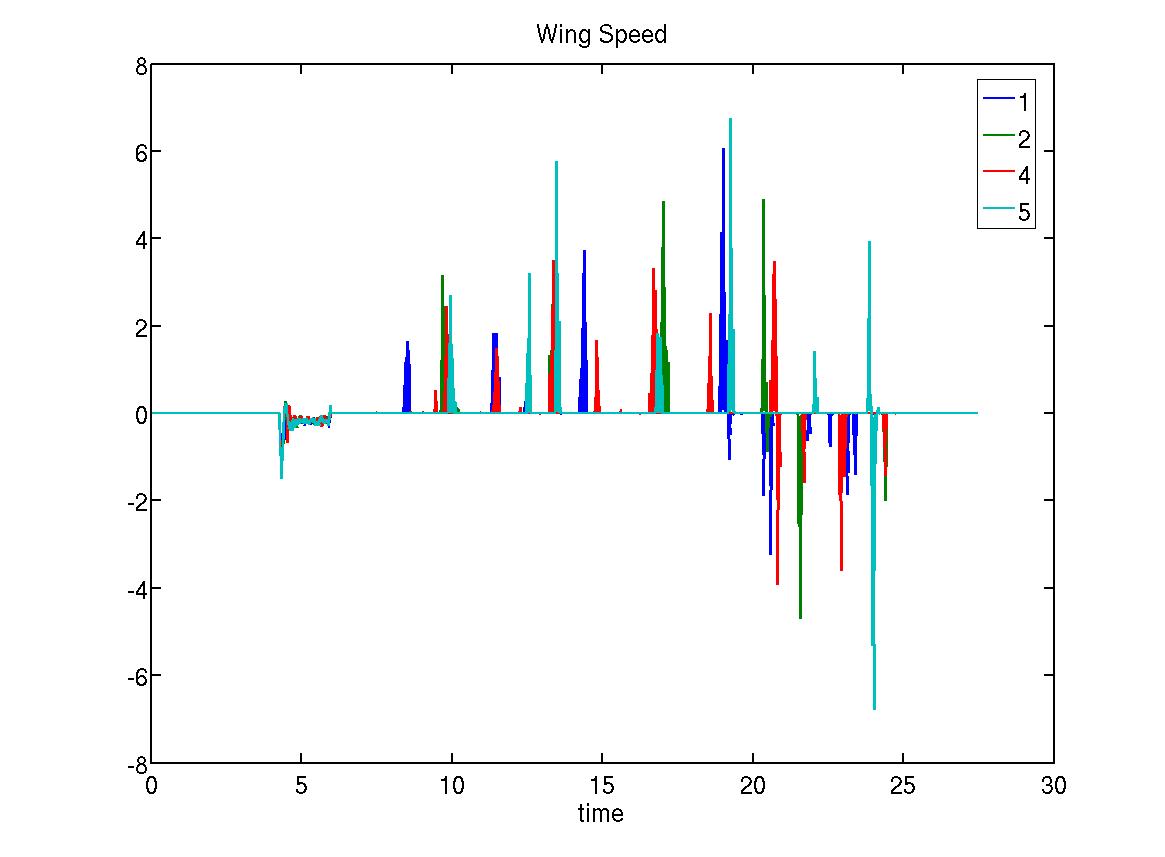
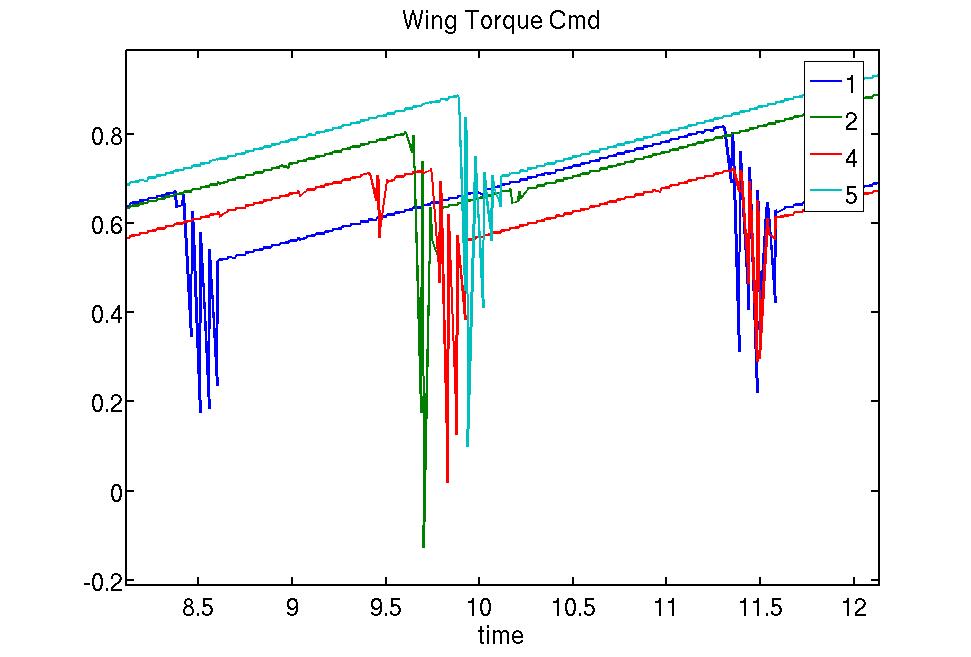
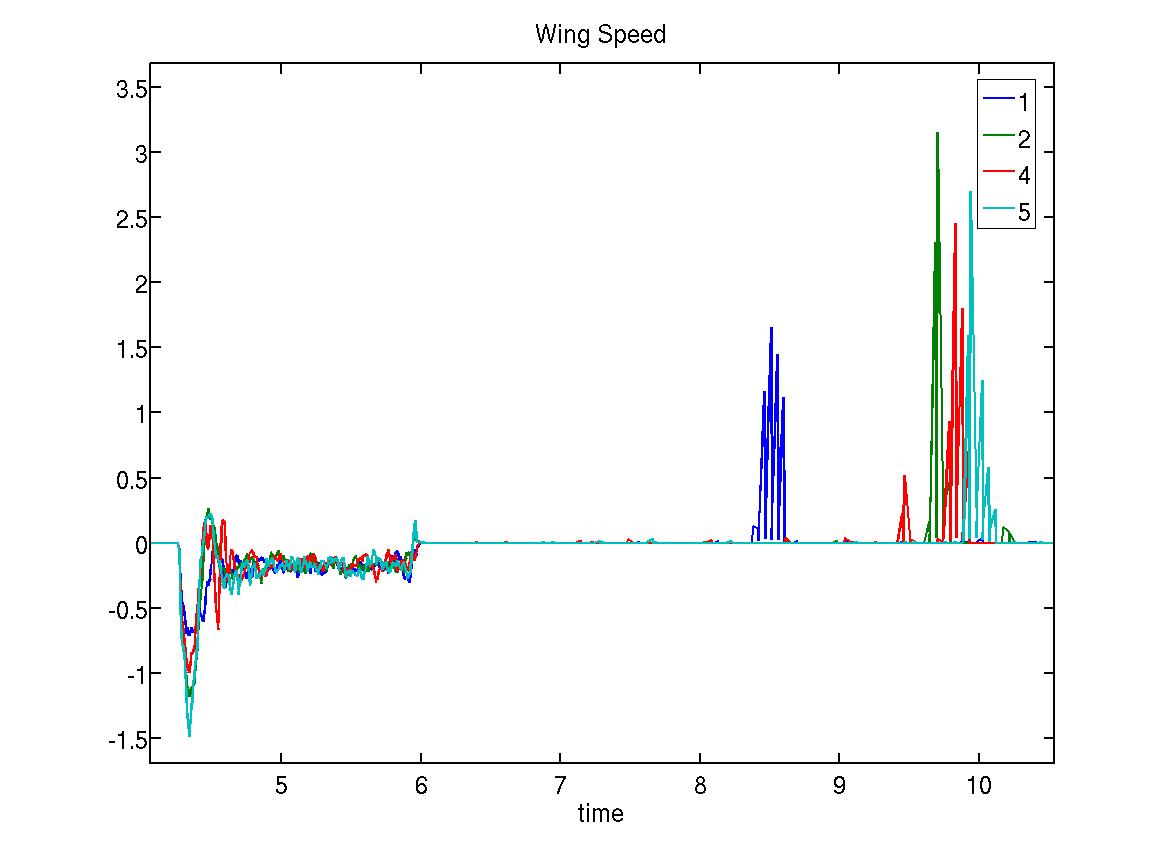
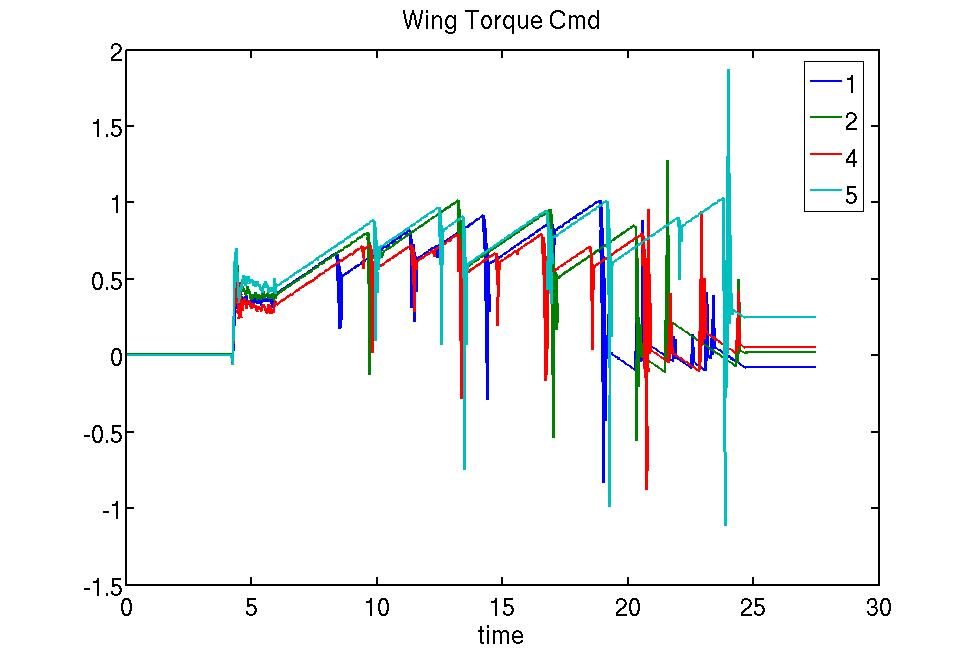
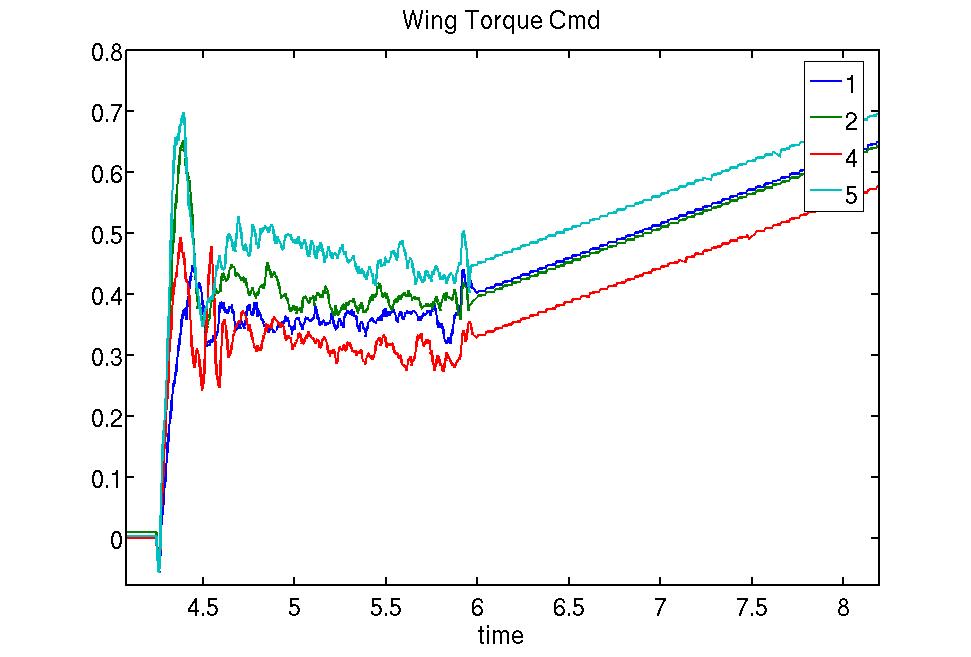
In general, there are several things you should notice in the plots below. During the StartupTransition, the legs' positions change very smoothly, but after that it is quite jerky--the legs stay still for a while then move up a bunch suddenly. Also, during the StartupTransition, the Torque Cmd is quite noisy but after that it increases linearly like one might expect since the leg isn't moving. In general the oscillation problems at higher gains are probably caused by the legs moving large amounts suddenly and overshooting then being commanded back, and so on.
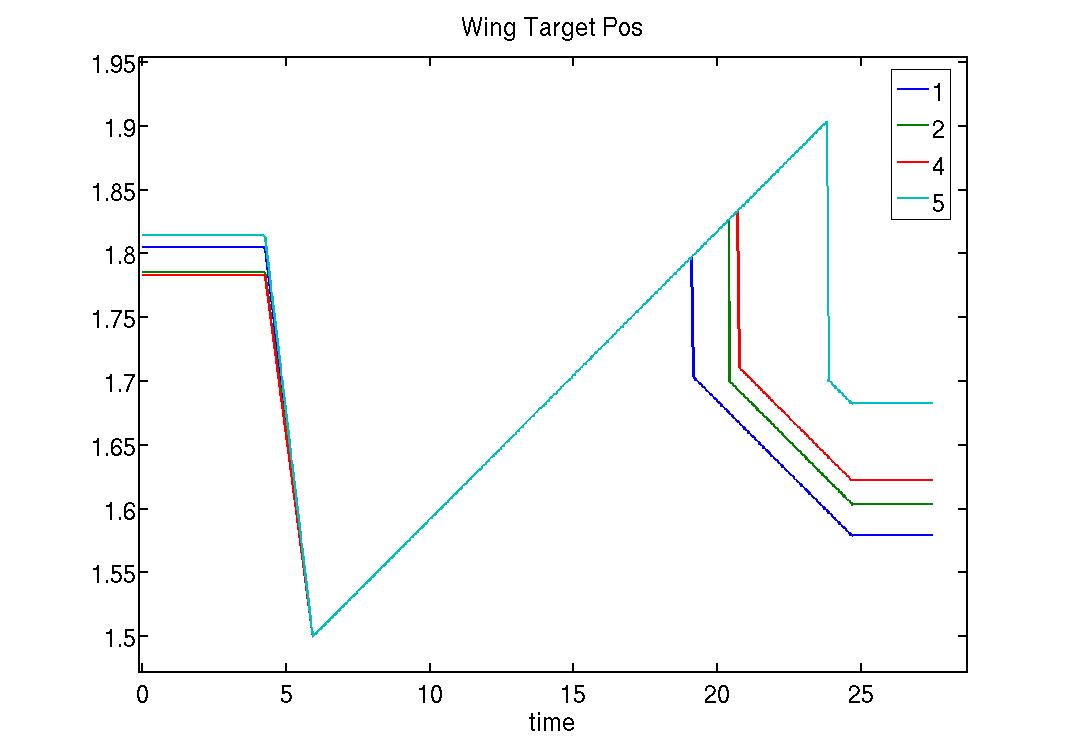
Also, here is how I compute the target position and velocity:
StartupTransition, but jerkily after that.
StartupTransition.
StartupTransition finishes.
StartupTransition..
StartupTransition period and after that.
 -- AlanAsbeck - 21 Jul 2006
-- AlanAsbeck - 21 Jul 2006
p-gains = 5.000000, 0.000000, 0.000000, 5.000000 d-gains = 0.250000, 0.000000, 0.000000, 0.250000If the gains are put to the normal values of kp=10 and kd=0.5, the legs will oscillate violently. For this test, clock->vel == 0.150207 and clockstep had values of 0.000751 about 75% of the time and 0.005406 about 25% of the time (note the factor of 10 difference!). First, an explanation of what I am trying to do here: After Calibration, I make the wings to go initial positions of 1.5. This occurs via the
wing_change = clock->vel * state_velocity * clockstep;
target.pos[i] = wing_change + f->state_target_last[];
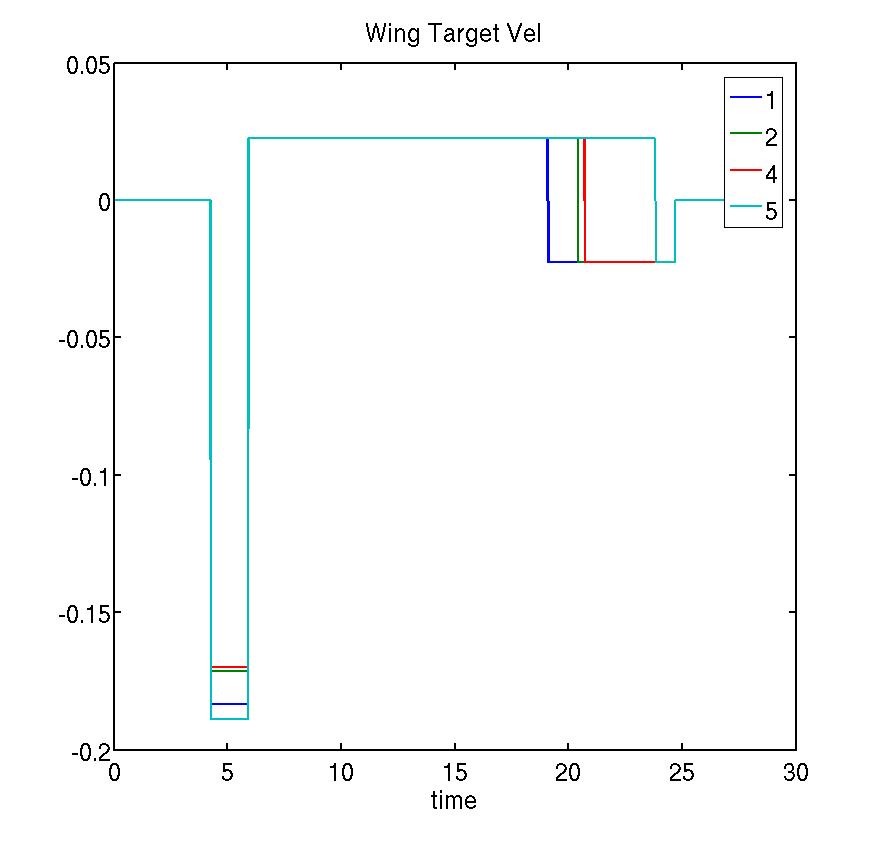
target.vel[WING] = clock->vel * clock->vel * state_velocity;
Description of variables:
clock->vel = speed of global clock, the number on the GUI for the speed
state_velocity = a number I set, related to the speed I want the wing to go. This is a constant.
clockstep = global clock time difference between when updateClock() was called this time and last time.
f->state_target_last[] = last target.pos[i] last time updateClock was called
In summary, every time updateClock() is executed, we move the target position further ahead by wing_change (for the wing). The target velocity is correctly set so that if the leg were continuously moving at the target velocity it would pass through all the target position points at the correct times.
Plots of variables I logged: - Wing Angle:
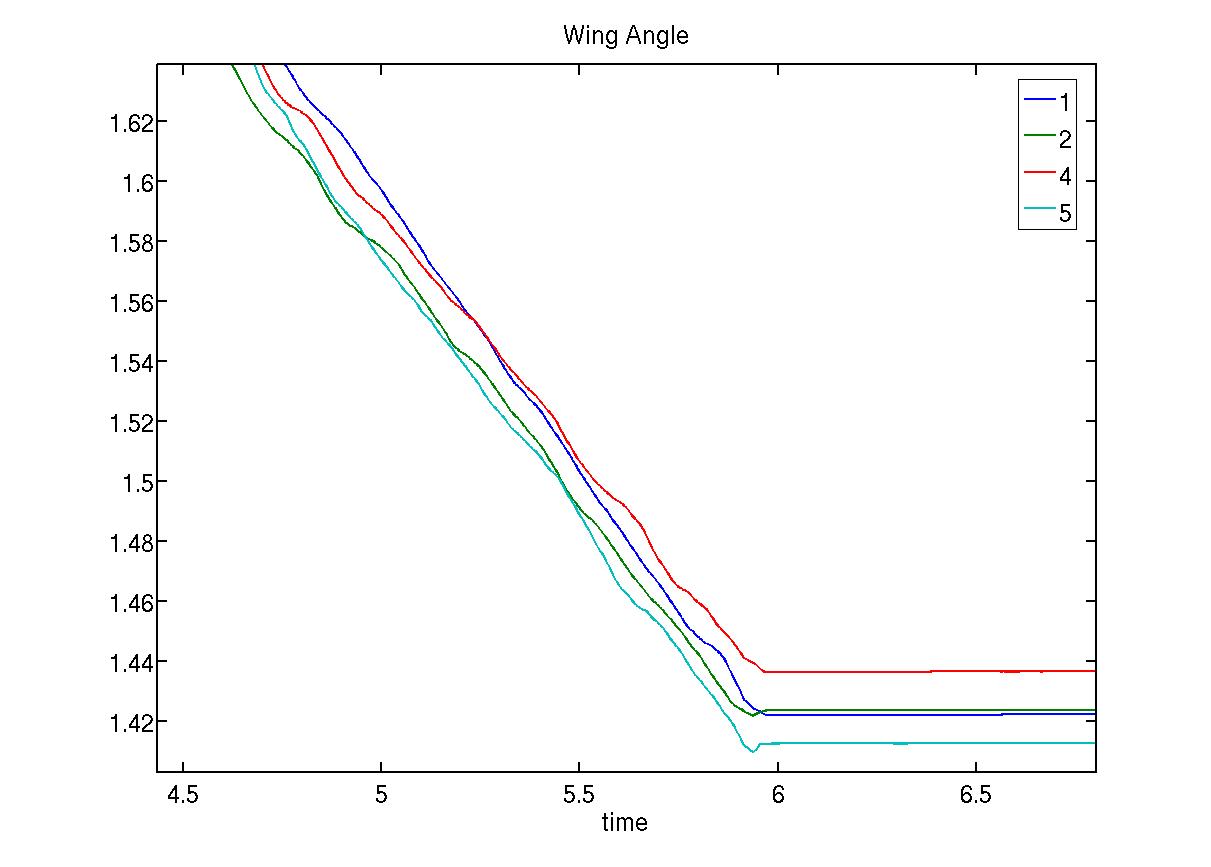
- Wing Angle Zoom:
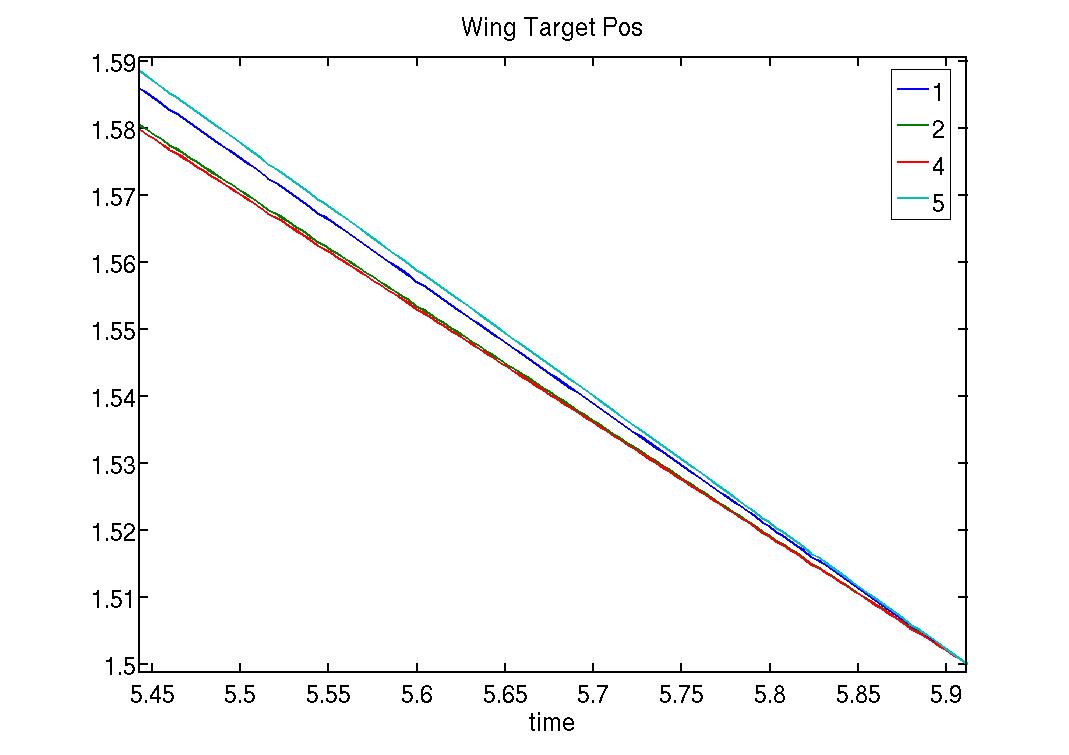
- Target Pos:
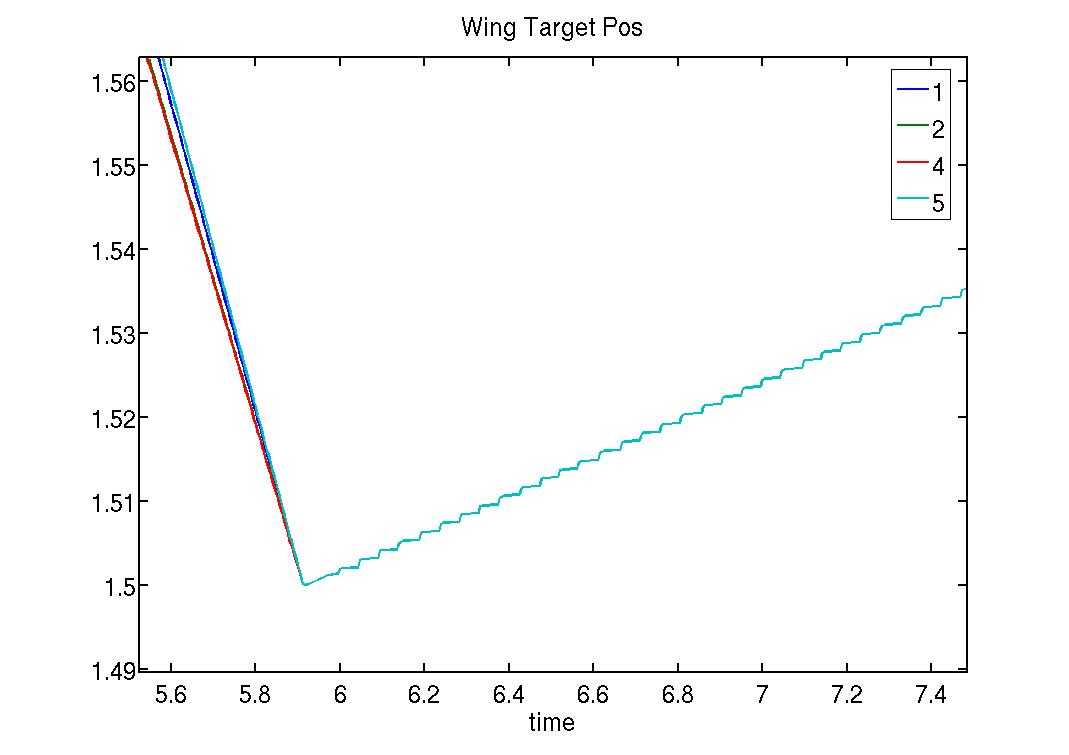
- Target Pos Zoom 1:
- Target Pos Zoom 2:
- Target Vel:
- Wing Speed:
- Wing Speed Zoom:
- Wing Torque Cmd:
- Wing Torque Cmd Zoom 1:
- Wing Torque Cmd Zoom 2:
-- AlanAsbeck - 21 Jul 2006 Ideas, requests, problems regarding TWiki? Send feedback