new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > ProjectManagement > FootSensingAndActuation>ElectrostaticSensor (02 Aug 2004, VirgilioMattoli? )
Rise Web>ClimbingRobot > ProjectManagement > FootSensingAndActuation>ElectrostaticSensor (02 Aug 2004, VirgilioMattoli? )
Electrostatic Sensor
-- VirgilioMattoli? - 02 Jul 2004 I've put together a simple sensor and programmed a PIC microcontroller to investigate the efficacy of this technology for foot proximity and touchdown sensing. Here is a picture of the experimental setup with the microcontroller connected to the sensor chip. The sensor chip, as shown, is connected to an array sensor as well as single electrostatic sensing elements and a pressure sensor.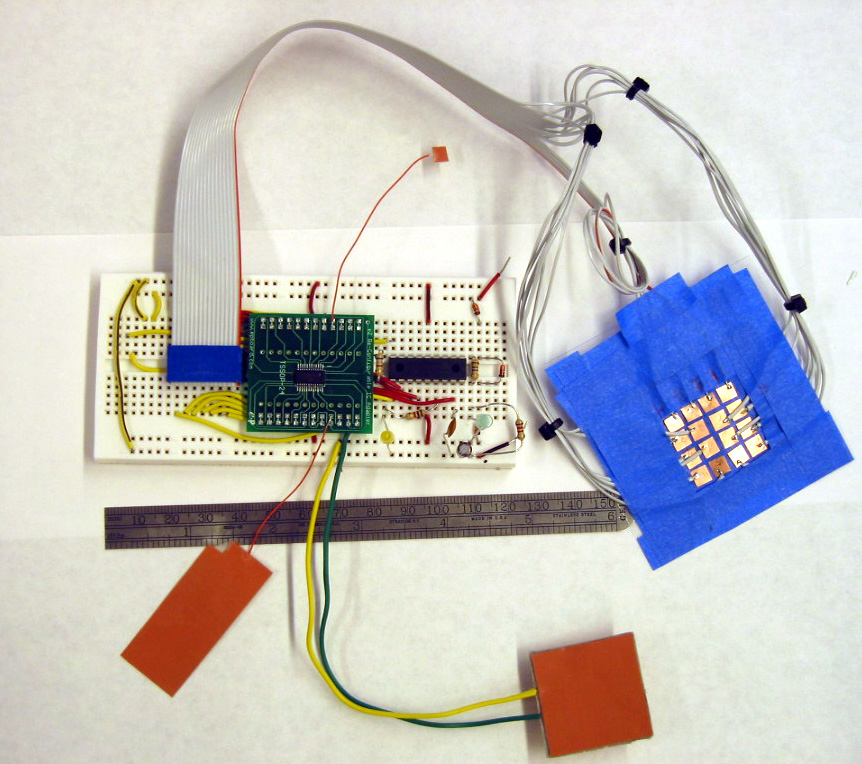 Fig. 1
An array of 16, 4 X 4 mm2 sensor is realised in order to perform test of conditioning Chip and electronics setup. Results of preliminary test on the array of sensor was reported in the following figure. The signal are obtained touching each sensor of array with a finger. Results show that the experimental setup work well. Cross coupling showed in the figure is due mainly to the fact that touching a sensor in the array also the near sensors are influenced by finger.
Fig. 1
An array of 16, 4 X 4 mm2 sensor is realised in order to perform test of conditioning Chip and electronics setup. Results of preliminary test on the array of sensor was reported in the following figure. The signal are obtained touching each sensor of array with a finger. Results show that the experimental setup work well. Cross coupling showed in the figure is due mainly to the fact that touching a sensor in the array also the near sensors are influenced by finger.
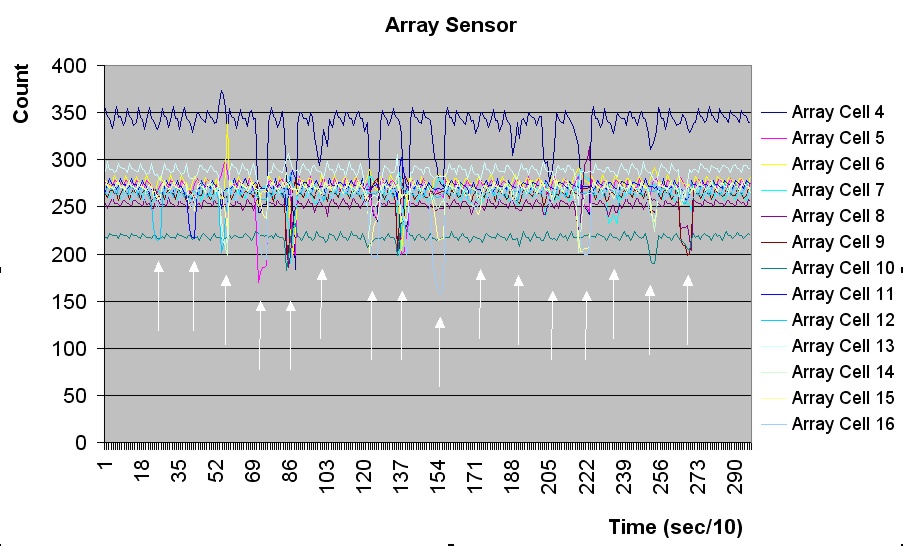 Fig. 2
With this setup I've investigated the effect produced by different type of materials on the electrostatic sensors.
Two type of sensor are used for the tests: both realised with a sheet of cooper coated with insulating material (the same used for flex circuit realization) but different in dimensions:
- The big one is 46 X 20 mm2
- The small one is 5 X 5 mm2
Also a pressure sensor composed by two sheet of copper separated by an insulating foam are preliminary investigated. But from the tests results that the foam used is too thick an rigid to obtain good sensitivity.
Before to evaluate the effect of different substrate on the sensor a cross correlation test is performed.
In Fig. 3 the results of cross correlation test are reported.
The correlation is not negligible.
Fig. 2
With this setup I've investigated the effect produced by different type of materials on the electrostatic sensors.
Two type of sensor are used for the tests: both realised with a sheet of cooper coated with insulating material (the same used for flex circuit realization) but different in dimensions:
- The big one is 46 X 20 mm2
- The small one is 5 X 5 mm2
Also a pressure sensor composed by two sheet of copper separated by an insulating foam are preliminary investigated. But from the tests results that the foam used is too thick an rigid to obtain good sensitivity.
Before to evaluate the effect of different substrate on the sensor a cross correlation test is performed.
In Fig. 3 the results of cross correlation test are reported.
The correlation is not negligible.
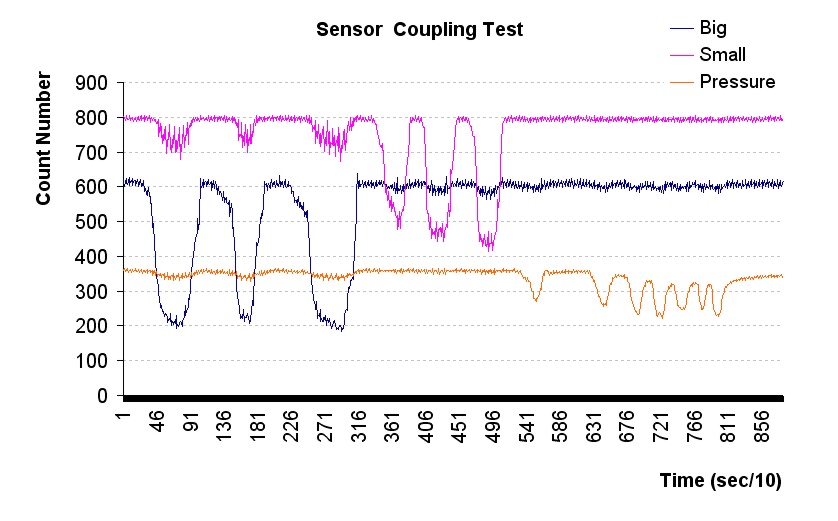 Fig. 3
Test on materials are performed using:
- finger
- metal
- wood
Results of comparative sensitivity material test are reported in Fig. 2
Fig. 3
Test on materials are performed using:
- finger
- metal
- wood
Results of comparative sensitivity material test are reported in Fig. 2
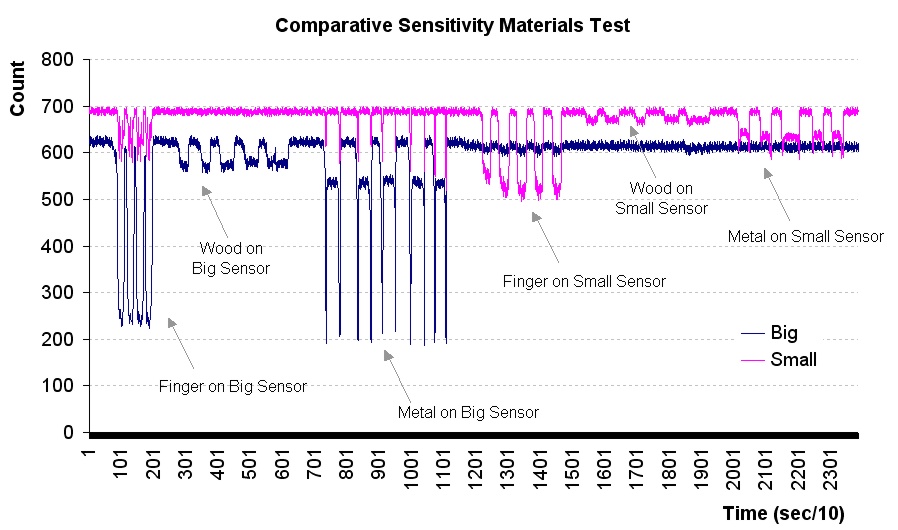 Fig. 4
Variation of signal is very good by using finger (high % of water in the human body), in both sensor.
Variation of signal is good using metal as substrate in the big sensor and acceptable in the small.
In the case of wood the results are just acceptable with the big sensor and not acceptable using the small one (in this case the signal variation is in the order of electrical noise).
CONCLUSIONS:
Because only the small sensor is suitable for the embedding in a foot robot (for dimensions, and because typically materials to detect have a dielectric constant comparable with wood (and not comparable with metal or human body) the use of electrostatic sensor seems to be not the first choice for contact foot detection!
Fig. 4
Variation of signal is very good by using finger (high % of water in the human body), in both sensor.
Variation of signal is good using metal as substrate in the big sensor and acceptable in the small.
In the case of wood the results are just acceptable with the big sensor and not acceptable using the small one (in this case the signal variation is in the order of electrical noise).
CONCLUSIONS:
Because only the small sensor is suitable for the embedding in a foot robot (for dimensions, and because typically materials to detect have a dielectric constant comparable with wood (and not comparable with metal or human body) the use of electrostatic sensor seems to be not the first choice for contact foot detection! Ideas, requests, problems regarding TWiki? Send feedback