new web: http://bdml.stanford.edu/pmwiki
TWiki > Main Web>PerchingProject>JumpingDesign (30 Oct 2010, MarkCutkosky)
Main Web>PerchingProject>JumpingDesign (30 Oct 2010, MarkCutkosky)
Planning sessions
Review Jumping Mechanisms
BioinspirationOverview of jumping (from University of Bath, The Centre for Biomimetic and Natural Technologies; creators of Jollbot and Glumper, see below) Leg Design and Jumping Technique for Humans, other Vertebrates and Insects
- Thighs mass is about 20% in human and bushbabies, while lower legs and feet represents about 12%. In the locus, the femora are 14% of body mass, while the tibiae and tarsi are only 3%.
- Weight: 70kg for humans, 0.3kg for bushbabies and 2g for the locust.
- Leg segment 450mm for humans, 66mm for bushbabies, 25mm for locust.
- BowLeg Hopper is using a carbon spring and a free rotating hip to hop stably around...
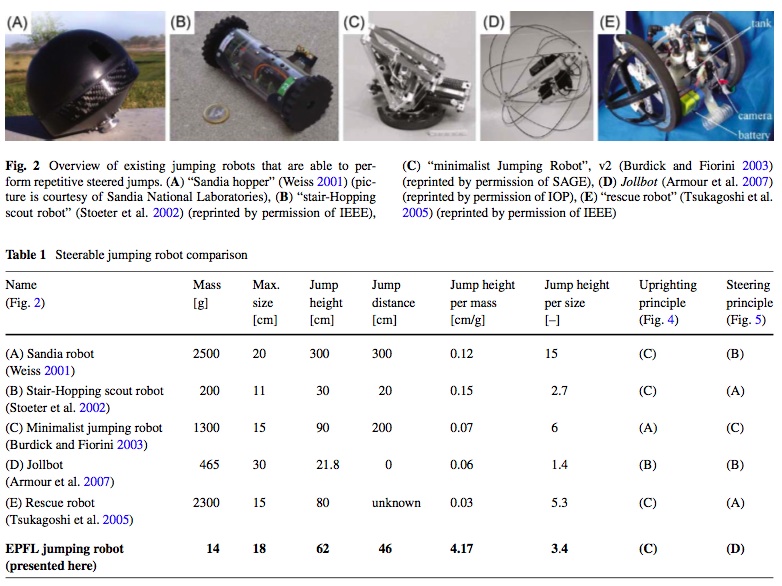
- Kovač, Mirko, Manuel Schlegel, Jean-Christophe Zufferey, and Dario Floreano. "Steerable miniature jumping robot." Autonomous Robots (December 2009).
-
- Minimalist Jumping robot
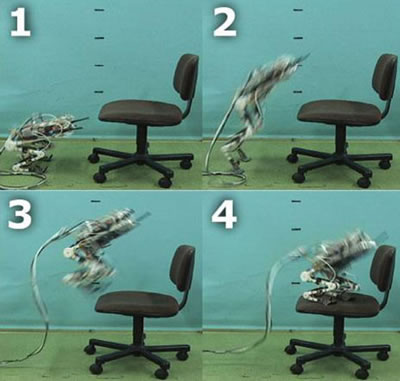
- MOWGLI
- 3kg
- height (standing straight): .9m
- jumping height: .5m
-
- Precision Urban Hopper
- fuel: methyl acetylene-propadiene gas
- 6.5 pounds
- jumping height: >25 feet (~7.62m)
-
 (https://share.sandia.gov/news/resources/news_releases/sandia-hopping-robots-to-bolster-troop-capabilities/)
(https://share.sandia.gov/news/resources/news_releases/sandia-hopping-robots-to-bolster-troop-capabilities/)
- 7g robot
- jumping height: 1.4m
- height: 5 cm
- torsion spring
- launch angle = 75 degrees from the horizontal
- launch velocity (with 3g payload) = roughly 4.2 m/s (1 m/s at the top)
- at 10g (3g payload), jump height = 1m
-

- (http://lis.epfl.ch/index.html?content=research/projects/SelfDeployingMicroglider/)
- Deformable body jumping robot
- spring steel
-
 (http://www.ritsumei.ac.jp/se/~hirai/research/softrobot-e.html):
(http://www.ritsumei.ac.jp/se/~hirai/research/softrobot-e.html):
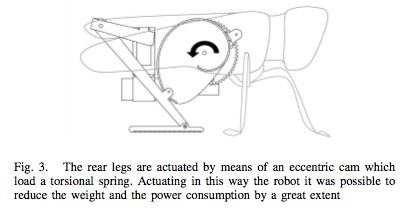
- "Grillo" Mini Robot
- 4 legs, passive fore-legs, sprig-actuated rear-legs
- mass: 15g
- height: 5cm
- launch speed: 1.6 m/s
- launch angle: 45 degrees
- landing impact energy is stored in the rear-leg springs
- spring-cam-motor mechanism (image from Design_and_Development_of_the_Long-Jumping_Grillo_Mini_Robot.pdf)
- .2W DC motor, torsion spring
-
- Glumper (glider/jumper)
- Article there, but can't download it...
- Picture of it
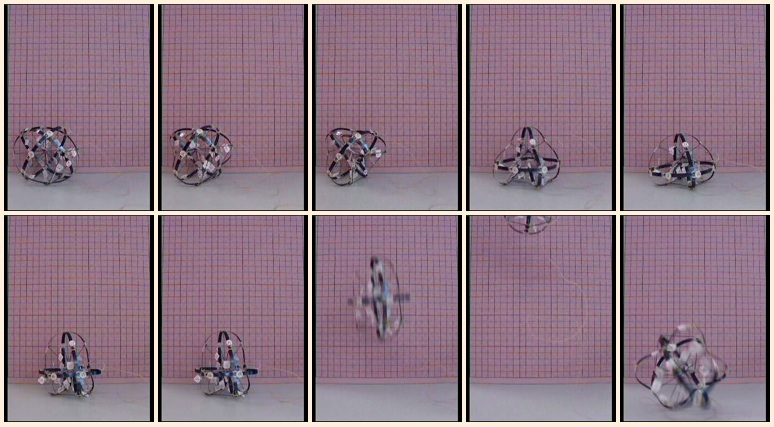
- mass: 375g
- height: .5m
- jumping height: 1.17m
- torsion springs
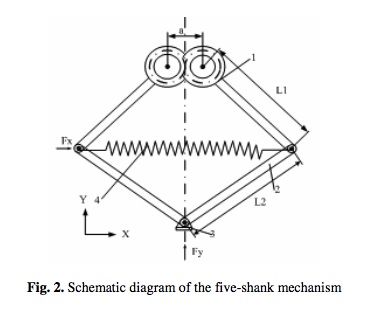
- Wheeling-hopping Combination Scout Robot
- 1.2kg
- jumping height: 15cm
- motor/spring-based
- 5-shank hopping mechanism:
-
- A_Wheeling-Hopping_Combination_Scout_Robot.pdf
{kind=link}
{kind=link}
Functions
1 = desirable*, but not a priority2 = more desirable upgrade from most basic jumping/takeoff (and maybe helpful to jumping), but not necessarily necessary
5 = very probably going to be crucial to successful basic jumping/takeoff
*largely driven by what we want to build, so these are definitely up for discussion Mass
| Low relative mass of the foot | (5) | Energy lost = (mass of foot)/(total mass) x 100% (in [Alexander 1995] they say that thighs mass is about 20% in human and bushbabies, while lower legs and feet represents about 12%. In the locus, the femora are 14% of body mass, while the tibiae and tarsi are only 3% |
| Low overall mass of the jumping system | (5) | Ideally around 75g (absolute max of 100g, assuming the plane's mass is 400g -- any heavier and it won't fly) |
| Able to carry payload | (1) | A small camera would be awesome |
| Efficiently convert potential energy to kinetic energy | (5) | "frogbot" (see second generation robot in "Minimalist Jumping Robot for Celestial Exploration") achieves 70% efficiency using the six-bar mechanism |
| No slippage during jump | (5) | Minimized slippage contributes to efficiency |
| Able to vary the takeoff angle | (4) | (So we can manually change/preset launch angle) |
| Able to vary the point of application of the force (on the plane) | (4) | (without altering takeoff angle) |
| Active control of the energy/force release | (2) | |
| Load and unload the mechanism (without jumping) | (1) | |
| Store energy | (5) | If we assume 100% conversion efficiency, we need to store 5.08 to 13.14 joules of energy (see June 30th on Julia's blog for calculation details). At 70% efficiency (achieved by "frogbot"), this corresponds to 7.26 to 18.77 joules. Springs or possibly SMA are probably our best bet. Pneumatics require heavy compressors. |
| Minimize airplane drag during takeoff | (3) | Drag force becomes more significant than the force of gravity at velocities just under 4 m/s |
| Minimize roll and yaw motion during jumping | (4) | |
| Perform multiple jumps | (5) | |
| Quickly loads the mechanism | (3) | <30seconds |
| Control the area traversed by the airplane during takeoff (clear off obstacles) | (1) |
| Low drag of the mechanism during flight | (4) | |
| Collapsable during flight | (4) | |
| Ability to perform acrobatics | (1) | similar to above function (collapsable during flight) |
| Able to land and favor takeoff | (4) | |
| Load the jumping mechanism on landing | (3) | (at least absorb landing impact -- maybe for perching...) |
| Reducing redundancy | (3) | (minimize mass!) |
| Aesthetics / cool factor | (4) | |
| Other capabilities (mobility on the ground, perching, etc) | (2) |
| Being able to takeoff from various surface type (soft, hard, smooth, rough, uneven, grass, etc) | (1) | |
| Land and takeoff from incline surfaces | (1) | related to ability to change takeoff angle -- see "Jump" table above |
Concepts
Jumping Mechanism Brainstorm (July 2, 2010)
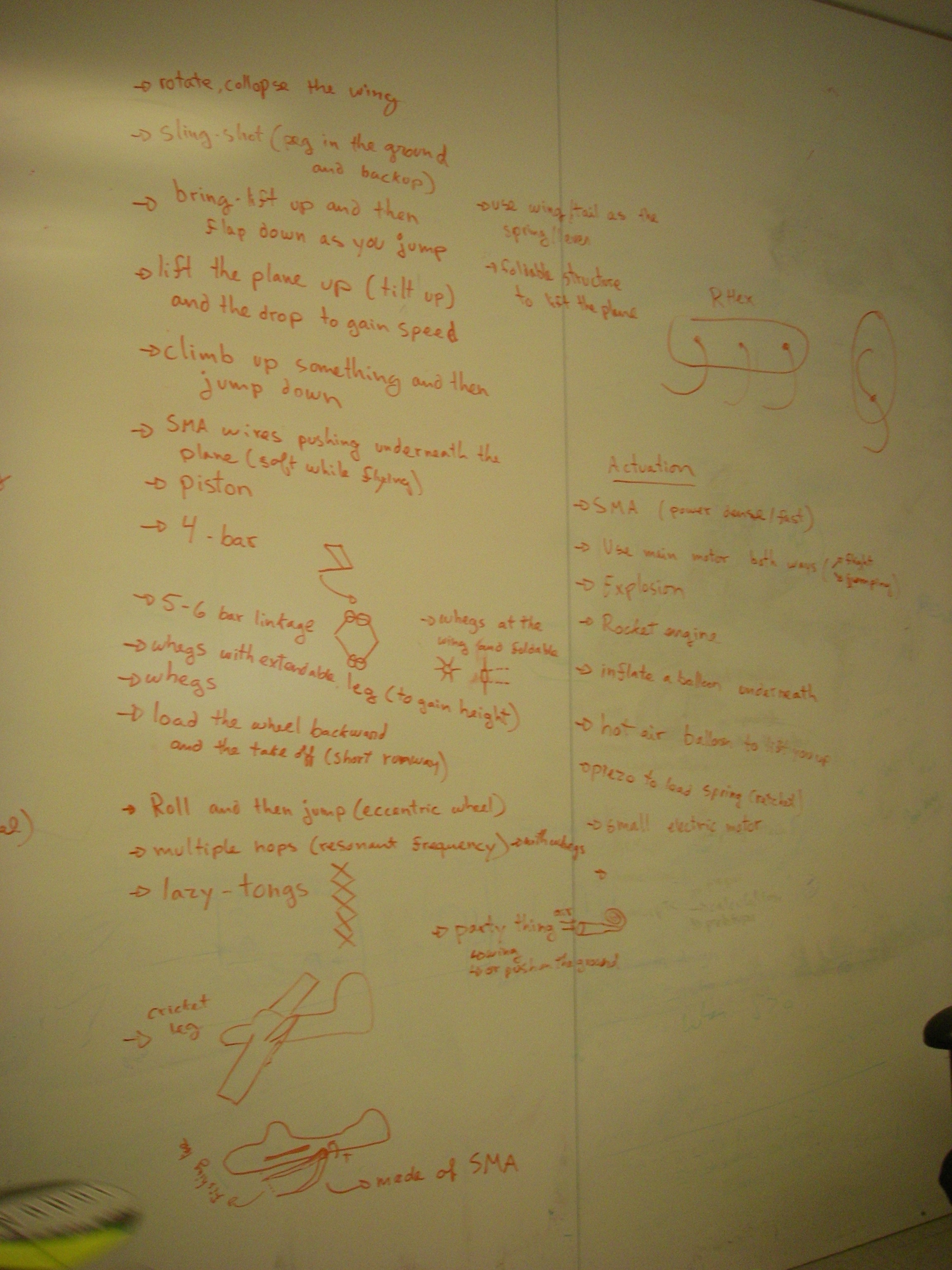
- Rotate, collapse the wing
- Slingshot (peg in the ground and back up)
- Lift up and then flap down as you jump
- Lift the plane up (tilt up) and drop to gain speed
- Climp up something and then jump down
- SMA wires pushing underneat the plane (soft while flying)
- Piston
- 4 bar linkage
- 5-6 bar linkage
- Whegs with extendable legs (to increase height)
- Load the wheel backward and then take off (short runway)
- Roll and then jump (eccentric wheel)
- Multiple hops (resonant frequency), with whegs
- Lazy-tongs
- Cricket leg
- Party thing (blow air into flat, curled paper tube and it unrolls into a cylindrical tube)
- Use wing/tail as the spring/lever
- Foldable structure to lift the plane
- Curve carbon fiber spring
- Cam-loaded spring
- Compression spring
- Bi-stable mechanism (snap-fast) with a spring in series
- Wait for the wind/reorient to face the wind
- Store compressed air in the wing
- Balloon (conical shape)
- SMA (power-dense, fast)
- Use main motor for flight and for jumping
- Explosion
- Rocket engine
- Inflate a balloon underneat
- Hot air balloon to lift you up
- Piezo to load spring (ratchet)
- Small electric motor
Preliminary Design
Detailed design/Fabrication/Prototype
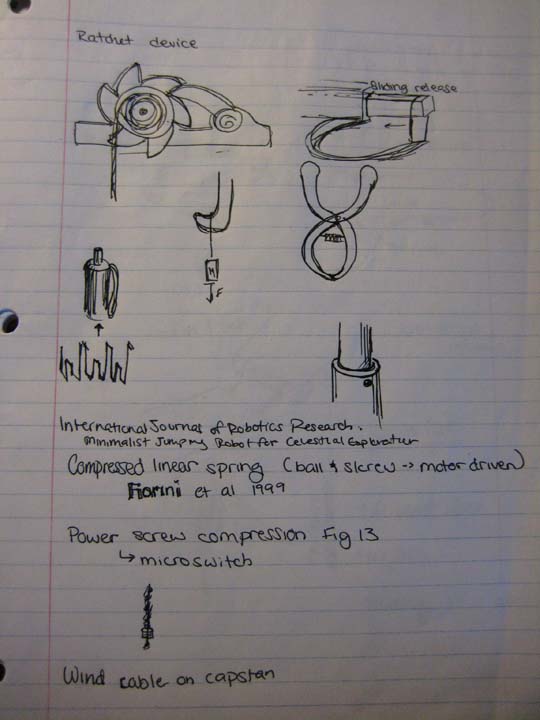
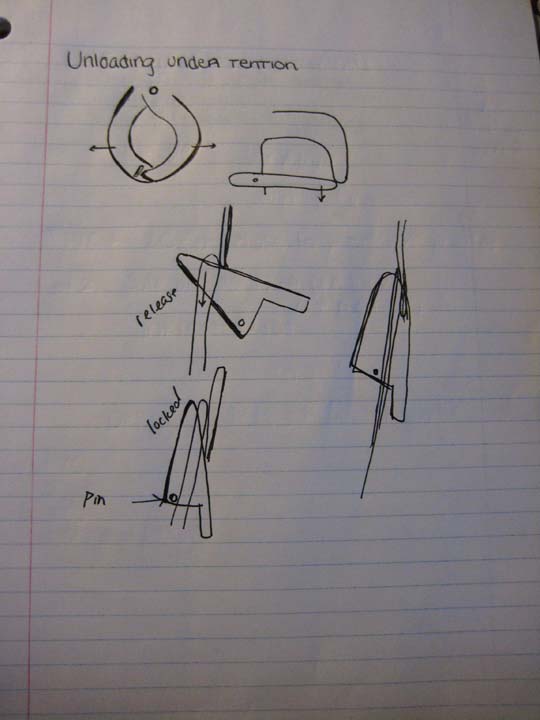
Release Mechanism
Design Requirements:- Release while in tention
- Quick release
- No premature trigger (locking)
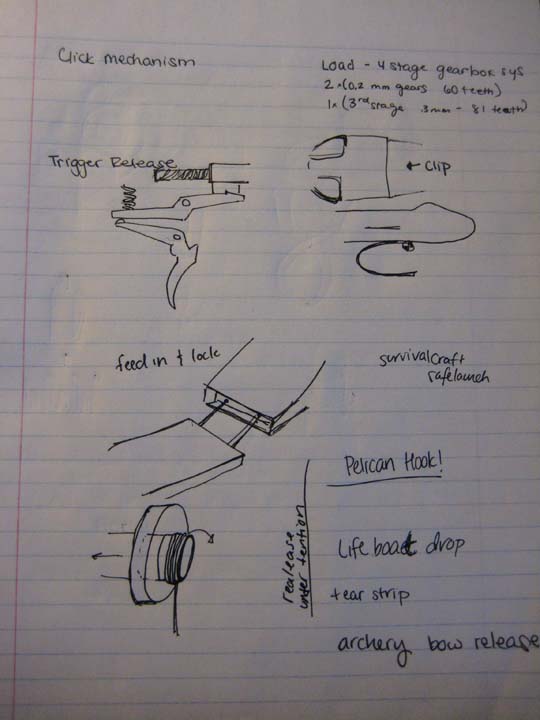
 Pelican Hook
Pelican Hook


Ideas, requests, problems regarding TWiki? Send feedback