new web: http://bdml.stanford.edu/pmwiki
TWiki > Haptics Web>StanfordHaptics > SkinStretchAndFriction>ProposedExperimentProtocalAndDetails (14 Dec 2004, WillP? )
Haptics Web>StanfordHaptics > SkinStretchAndFriction>ProposedExperimentProtocalAndDetails (14 Dec 2004, WillP? )
Though the objective of our project is to enhance the realism of virtual interactions by adding the sensations of skin stretch and friction to our current setup that is capable of rendering contact force and location, as a first step we were curious how these additional sensations would be interpretted. Since many researchers have investigated the effects of adding simulated friction to virtual interactions with great success, we're interested to see how the addition of skin stretch will influence a user's perception of friction.
We have proposed to use the paradigm of magnitude estimation to investigate the influence of skin stretch on the perception of friction. In addition to skin stetch, we will also provide subjects with visual information on an LCD monitor. The visual information will be a dot array (texture) with varying dot size and spacing. Subjects will be given two pieces of sand paper at the beginning of the test to help them interpret the suggested link between the dot size and spacing, where fine grit sand paper (600 grit) will be shown to have much lower friction than the course (220 grit) sandpaper.
The texture images will be something like this:
Of course, it is possible that slip may occur between the contact element and the user's fingerpad. Since the sensation of slipping could alter the user's perception of friction, shear forces (transmitted through the contact element) will be kept well below the static coulomb friction threshold (NOTE, FOR EXPERIMENT: When conducting the experiment, we will need to make sure subjects wash and dry their hands before testing, and take breaks to prevent perspiration from forming on their fingerpad which could possibly lead to slipping).
Fricton Model
The perception of friction in haptics can be quite tricky. Owing to its non-linearity, friction is rarely included in haptic displays. Sometimes while using haptic displays, users feel that friction is interfering with the perception rather than aiding it. Hence while conducting experiments, the friction model should be kept as simple as possible.
Due to it's simple numerical calculations and effectiveness, Karnopp friction model was implemented for this experiment. Similar to the Coloumb model, the Karnopp model also considers friction to be dependant on velocity. When the velocity goes below a threshold velocity (value set by us), the object goes into stuck phase. In the stuck phase, a virtual spring is created such that the contact display is pulled towards the the resting position of the spring. The diagram below shows an instance in the stuck phase
Stuck Phase:
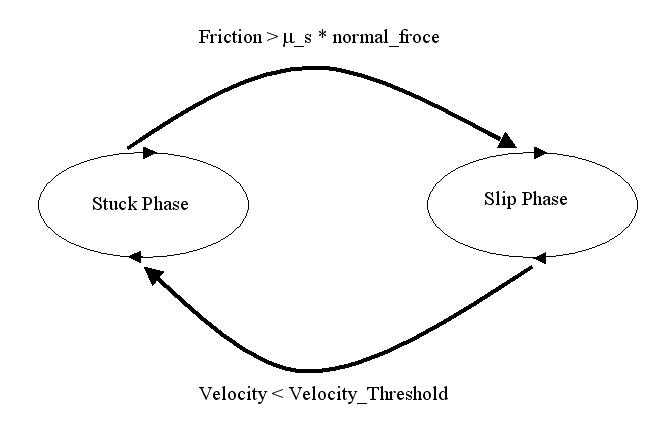
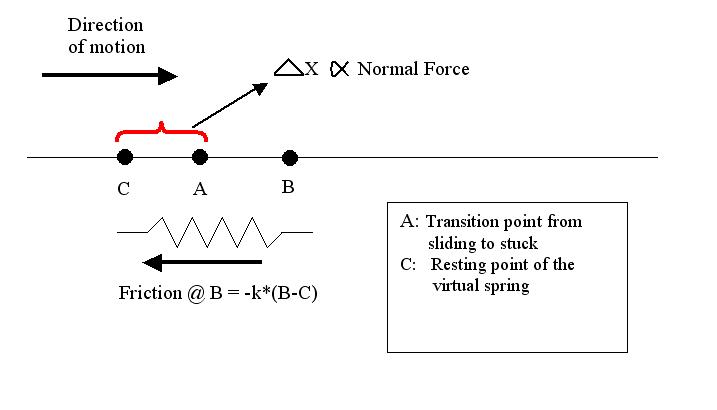 When this friction force(-k*(B-C)) becomes greater than the static friction force( mu_s*normal_force), the object goes into sliding phase. The state machine implemented for the karnopp friction model is shown below.
When this friction force(-k*(B-C)) becomes greater than the static friction force( mu_s*normal_force), the object goes into sliding phase. The state machine implemented for the karnopp friction model is shown below.
State Machine:
 A typical friction curve for a karnopp friciton model is below (For mu_s=0.30 and mu_k=0.20 )
Skin Stretch Model:
Previous experiments with the contact location display focused solely on displaying the position of contacts and no shear forces were imparted by the device's contact element. However, one of the strong cues you receive when gliding your finger over a surface in addition to the finger level frictional forces experienced is skin stretch in the opposing direction of motion. And we wondered how the addition of skin stretch affect the perception of friction and the realism of the virtual interaction?
As a starting point for driving the virtual simulation, we are using a very basic model for skin stretch. The amount that the contact display stretches the skin depends on the friction force being felt by the user. The motion of the contact element is the computed friction force (Karnopp friction model, described above) divided by the estimated skin stiffness. This approximation is in agreement with previous observations by Nahvi and Hollerbach.
skin_stretch = friction force / k_finger_stiffness
A typical friction curve for a karnopp friciton model is below (For mu_s=0.30 and mu_k=0.20 )
Skin Stretch Model:
Previous experiments with the contact location display focused solely on displaying the position of contacts and no shear forces were imparted by the device's contact element. However, one of the strong cues you receive when gliding your finger over a surface in addition to the finger level frictional forces experienced is skin stretch in the opposing direction of motion. And we wondered how the addition of skin stretch affect the perception of friction and the realism of the virtual interaction?
As a starting point for driving the virtual simulation, we are using a very basic model for skin stretch. The amount that the contact display stretches the skin depends on the friction force being felt by the user. The motion of the contact element is the computed friction force (Karnopp friction model, described above) divided by the estimated skin stiffness. This approximation is in agreement with previous observations by Nahvi and Hollerbach.
skin_stretch = friction force / k_finger_stiffness
This equation describes the motion of the contact element. Note that k_finger_stiffness refers to the shear stiffness of the fingerpad along the length of the finger. However, one must also pay attention to the static coefficient of friction between the contact element and the user's fingerpad. If the motion of the contact element induces shear force due to shearing of the fingerpad that exceeds mu_skin-contactElement * Normal_Force, actual slip between the contact element and fingerpad will occur. Here, the addition of "real slip" can greatly enhance the perceived realism of simulated friction. We will have test conditions that isolate cases with skin stretch from those where both skin stretch and slip occur.
For the setup, we have used a rounded wooden block shaped so that a finger can be easily rested on it. The wooden block is relatively smooth, to keep sliding forces relatively small, yet "sticky" enough to provide small amounts of skin stretch.
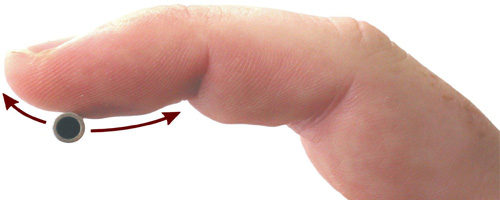
The picture below shows the idea of skin stretch (just replace the roller with a block of wood). The roller/wooden block moves back and forth based on the friction forces and virtual skin stiffness.
| fine texture = low friction | course texture = high friction | |
 |  |
Due to it's simple numerical calculations and effectiveness, Karnopp friction model was implemented for this experiment. Similar to the Coloumb model, the Karnopp model also considers friction to be dependant on velocity. When the velocity goes below a threshold velocity (value set by us), the object goes into stuck phase. In the stuck phase, a virtual spring is created such that the contact display is pulled towards the the resting position of the spring. The diagram below shows an instance in the stuck phase
Stuck Phase:
When this friction force(-k*(B-C)) becomes greater than the static friction force( mu_s*normal_force), the object goes into sliding phase. The state machine implemented for the karnopp friction model is shown below.
State Machine:
A typical friction curve for a karnopp friciton model is below (For mu_s=0.30 and mu_k=0.20 )
Skin Stretch Model:
Previous experiments with the contact location display focused solely on displaying the position of contacts and no shear forces were imparted by the device's contact element. However, one of the strong cues you receive when gliding your finger over a surface in addition to the finger level frictional forces experienced is skin stretch in the opposing direction of motion. And we wondered how the addition of skin stretch affect the perception of friction and the realism of the virtual interaction?
As a starting point for driving the virtual simulation, we are using a very basic model for skin stretch. The amount that the contact display stretches the skin depends on the friction force being felt by the user. The motion of the contact element is the computed friction force (Karnopp friction model, described above) divided by the estimated skin stiffness. This approximation is in agreement with previous observations by Nahvi and Hollerbach.
skin_stretch = friction force / k_finger_stiffness This equation describes the motion of the contact element. Note that k_finger_stiffness refers to the shear stiffness of the fingerpad along the length of the finger. However, one must also pay attention to the static coefficient of friction between the contact element and the user's fingerpad. If the motion of the contact element induces shear force due to shearing of the fingerpad that exceeds mu_skin-contactElement * Normal_Force, actual slip between the contact element and fingerpad will occur. Here, the addition of "real slip" can greatly enhance the perceived realism of simulated friction. We will have test conditions that isolate cases with skin stretch from those where both skin stretch and slip occur.
For the setup, we have used a rounded wooden block shaped so that a finger can be easily rested on it. The wooden block is relatively smooth, to keep sliding forces relatively small, yet "sticky" enough to provide small amounts of skin stretch.
The picture below shows the idea of skin stretch (just replace the roller with a block of wood). The roller/wooden block moves back and forth based on the friction forces and virtual skin stiffness.
Setting up the demo
-- WillP? - 24 Nov 2004 -- SureshSainath? - 11 Dec 2004Ideas, requests, problems regarding TWiki? Send feedback