new web: http://bdml.stanford.edu/pmwiki
TWiki > Haptics Web>StanfordHaptics > SkinStretch>PortableSkinStretchDesign (23 Jun 2009, MihyeShin)
Haptics Web>StanfordHaptics > SkinStretch>PortableSkinStretchDesign (23 Jun 2009, MihyeShin)
-- JoanSavall - 18 Dec 2007


Current Design Prototype
Latest Prototypes
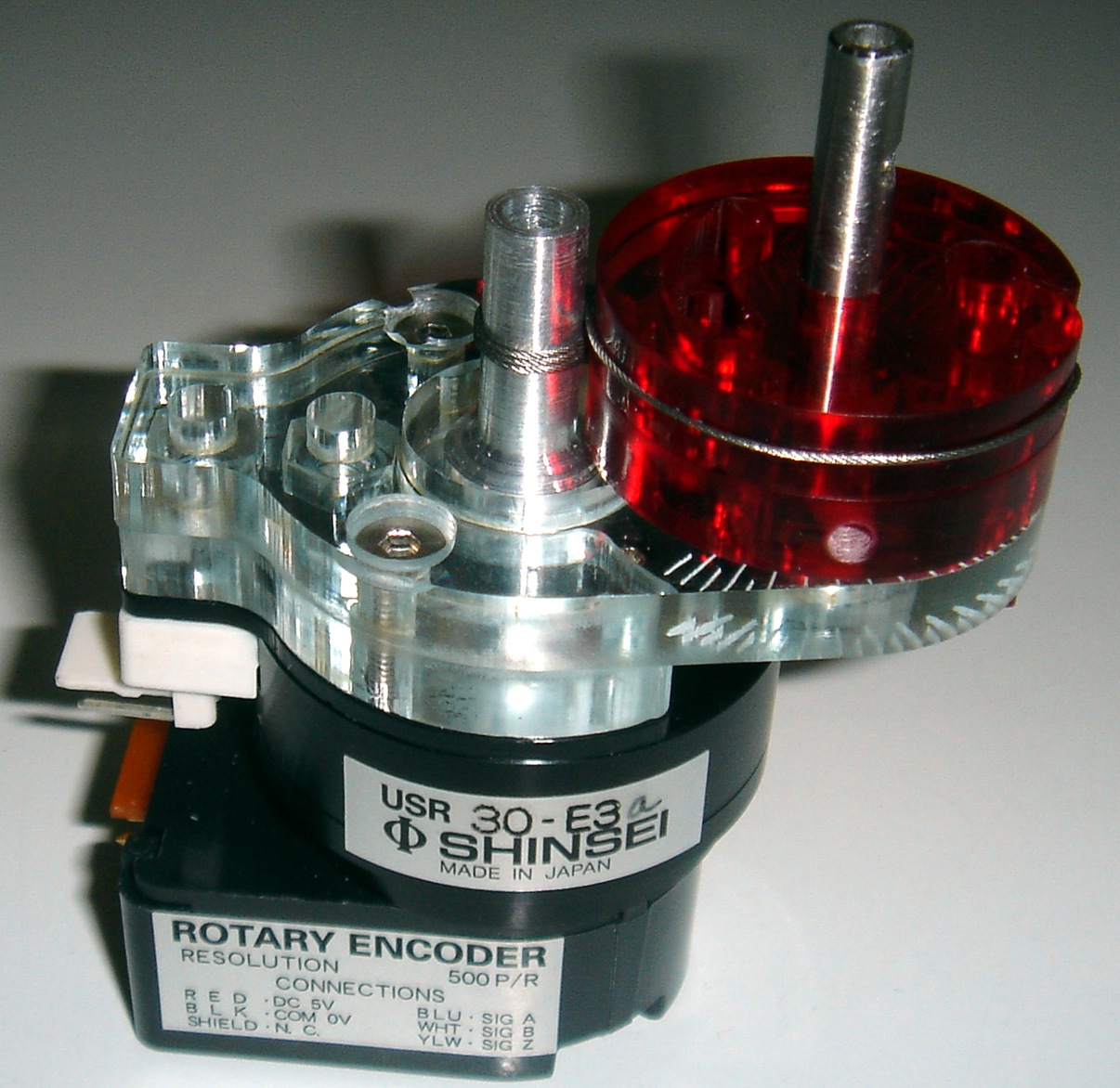
Actuators: Ultrasonic Motors
Ultrasonic motors appear as a very interesting technology for a wearable skin stretch device. Some of the advantages that they present are:- High output torques
- Compact
- Light
- No backdriveable (suited for low power consumption)
- Driving frequency 50kHz
- Rated torque 0.05Nm
- Rated rotational speed 250rpm
- Maximun torque 0.1Nm
- Holding torque 0.1Nm
- Weight (included encoder) 65g
- shinsei_Catalog_E_2005_09.pdf: Shinsei Catalog
Sensors
In order to design a wearable system we need very compact subsystem. Here we have some of very compact rotary sensors that we are considering to add to the final device.- absolutemagneticencoderMA3_USdigital.pdf: Miniature Absolute Magnetic Shaft Encoder
- miniatureencoderomsT_nemicon.pdf: Miniature optical encoder
- E4miniatureencoderUSdigital.pdf: US digital miniature optical encoder
- opticalencoder_AV01-0286EN.pdf: Module optical encoder
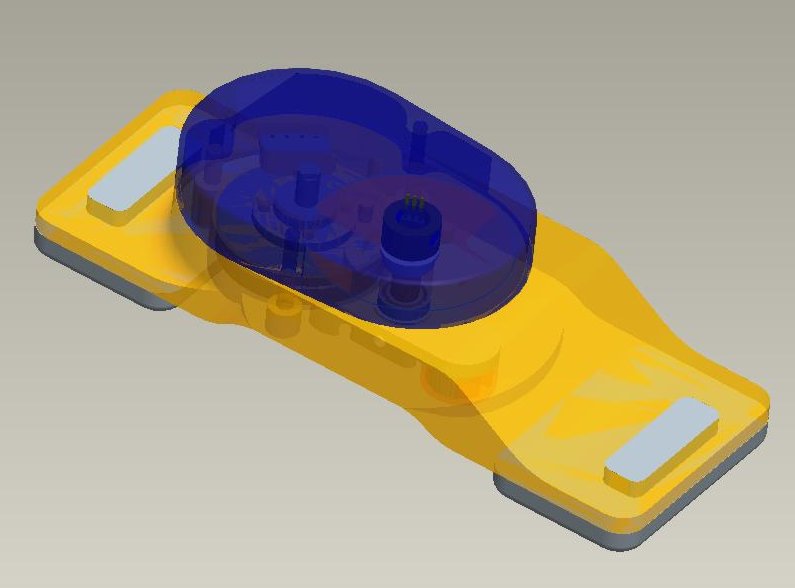
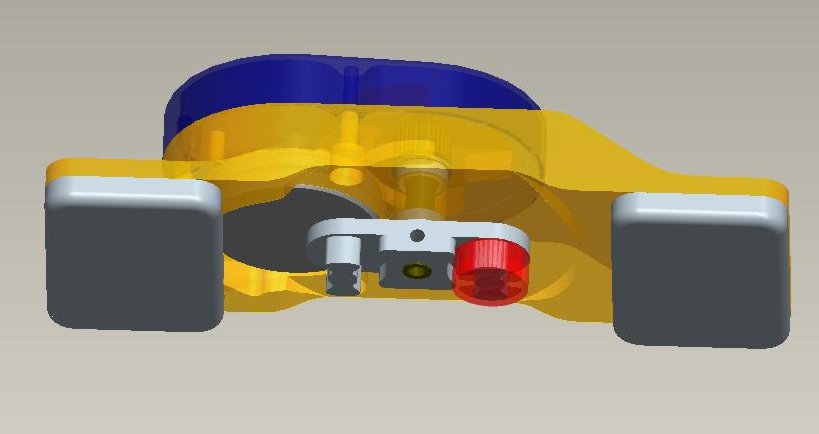
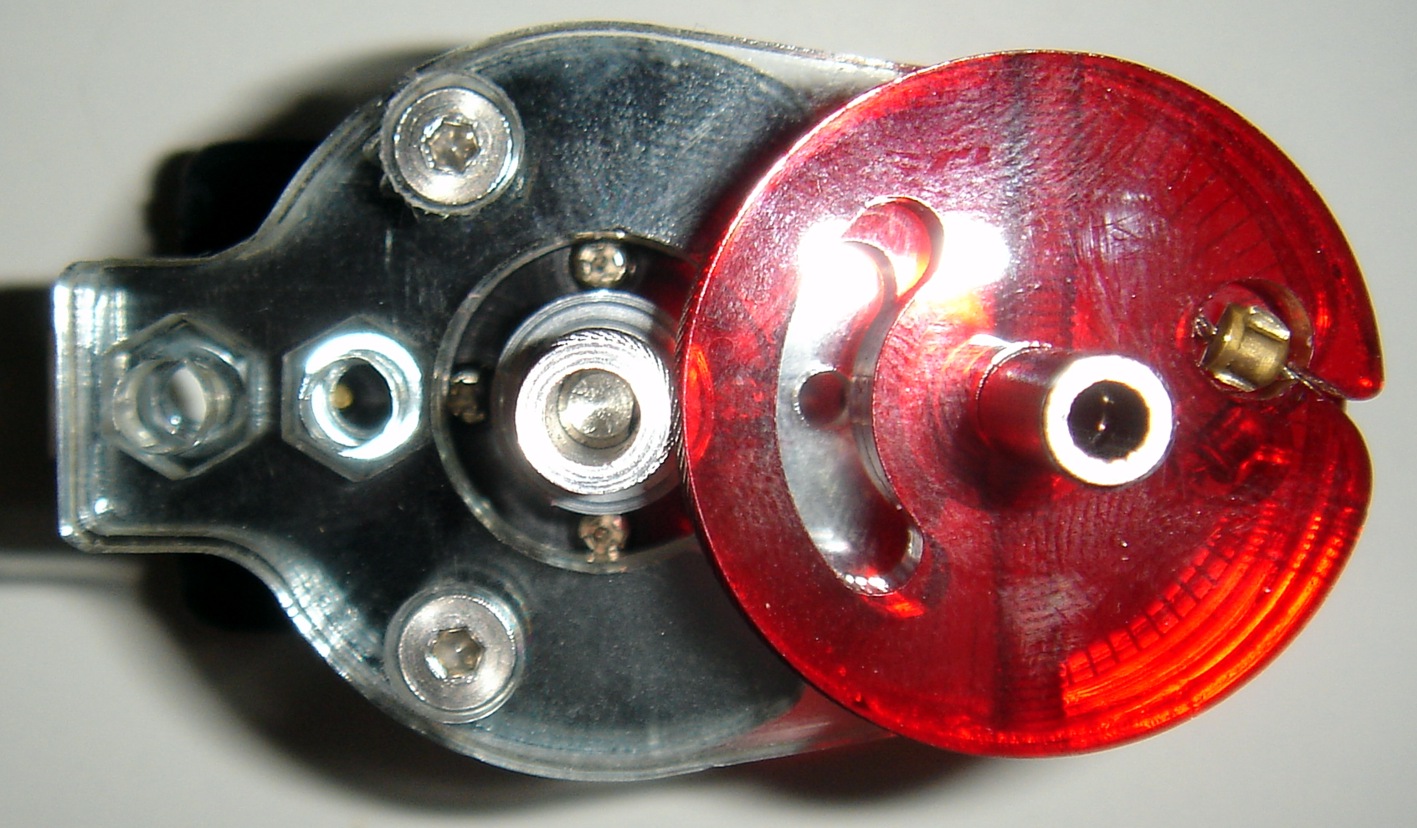
Trasmission
We just assembly a first prototype with an ultrasonic motor, an encoder and a compact cable transmission in order to obtain more output torque and to have a desktop system based in this technology.- The transmission ratio is 5, so the output torque of the system is 0.5Nm.
- The maximum ration angle is around 330deg.
- proto001_01.jpg:
- proto001_02.jpg:

- proto001_03.jpg:

- proto001_04.jpg:
Ideas, requests, problems regarding TWiki? Send feedback