new web: http://bdml.stanford.edu/pmwiki
TWiki > Seabed Web>SeabedMain>MeetingNotes20090722 (22 Jul 2009, BarrettHeyneman)
Seabed Web>SeabedMain>MeetingNotes20090722 (22 Jul 2009, BarrettHeyneman)
Pre-Meeting posts:
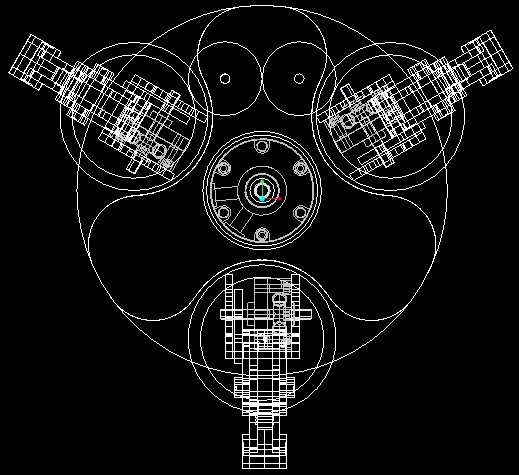
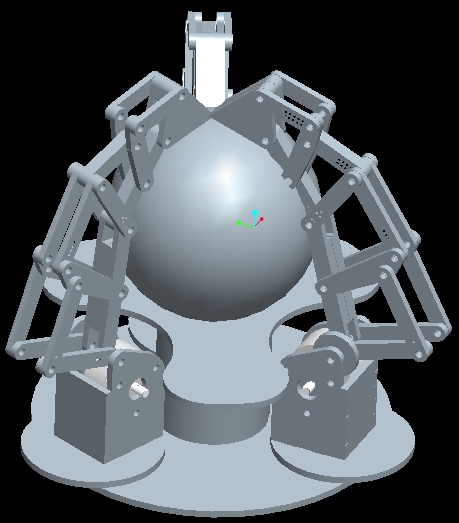
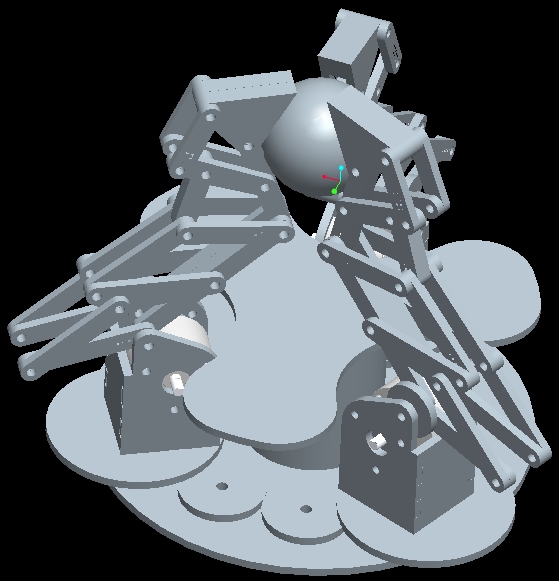
- Working on Base Desgn
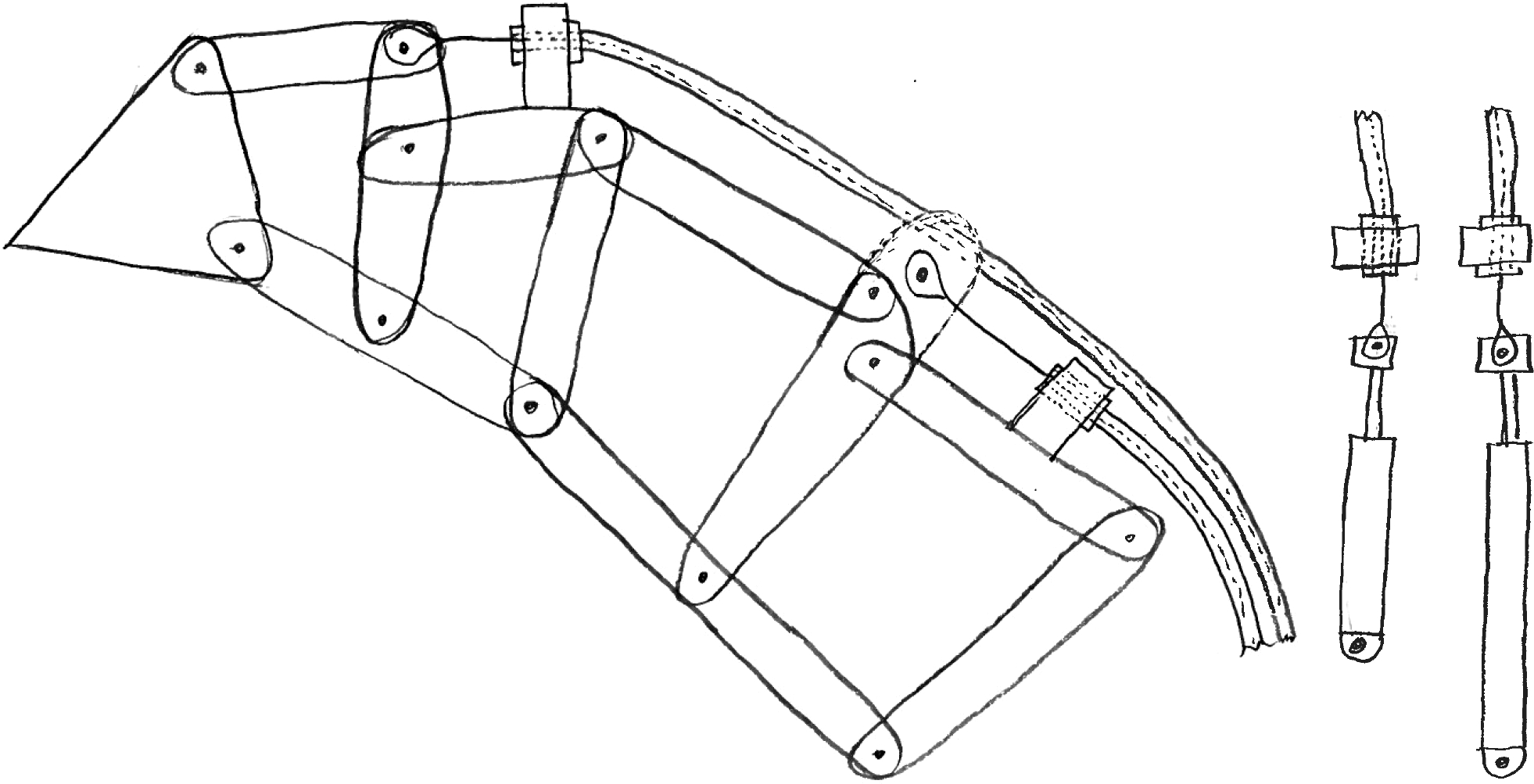
- Solving cable routing/attaching issue
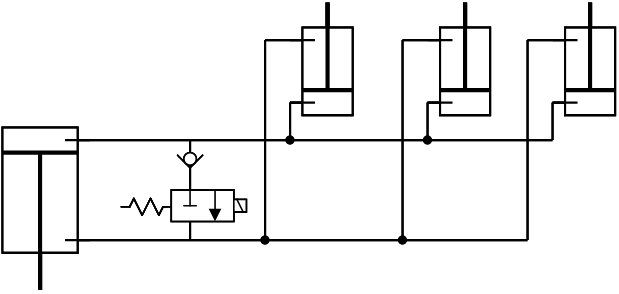
- Hydraulic circuit
- Part Selection
| SMC | Rotary Actuator | 3 | Main Actuator for Finger |
| SMC | Rotary Actuator | 1 | Input to main finger actuators |
| SMC | Tube Fitting | 6 | Hydraulic accessories |
| SMC | Tube Fitting | 2 | Hydraulic accessories |
| SMC | Pneumatic hose | ~20ft | |
| SDP-SI | 20mm Gear | 6 | connects rotary actuator to finger link 4 |
| SDP-SI | 30mm Gear | 2 | guides rotation of 2 fingers on base |
| SDP-SI | 40mm Gear | 2 | guides rotation of 2 fingers on base |
| SDP-SI | Bearing, 4mm bore | 12 | finger housing |
| SDP-SI | 4mm Thrust Bearing | 3 | supports loads for three fingers attached to base |
| Motor | 1 | Orients 2 fingers | |
| Actuated Valve | 1 | for zeroing of rotary actuators | |
| Check Valve | 1 | for zeroing of rotary actuators | |
| SMC? | Short Cylinder | 3 | Adjusting internal forces on second phalanx |
| SMC? | Long Cylinder | 3 | Adjusting internal forces on second phalanx |
| SMC? | Hydraulic actuator | 1 | Input actuator for internal force adjustment |
- Several grasps:
Meeting Notes
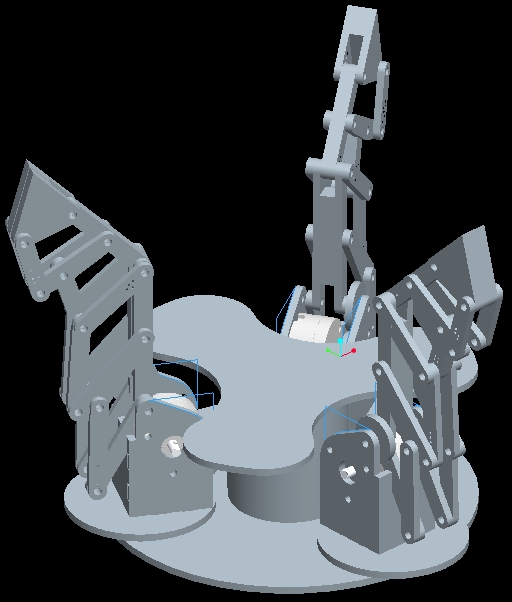
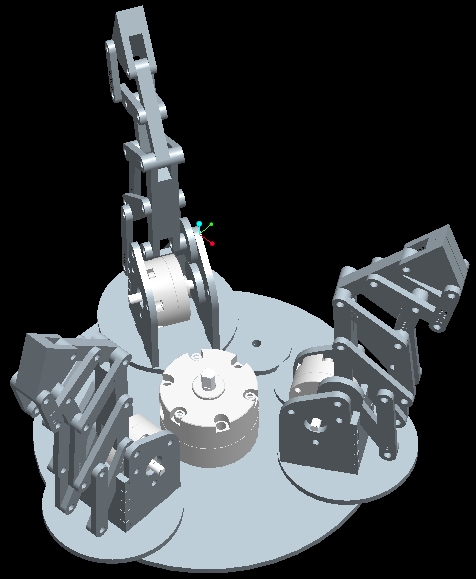
- Dan briefed everyone on current design status
- Palm and finger housing
- Rotary input motor
- Attachment between input shaft and rotary hydraulic master
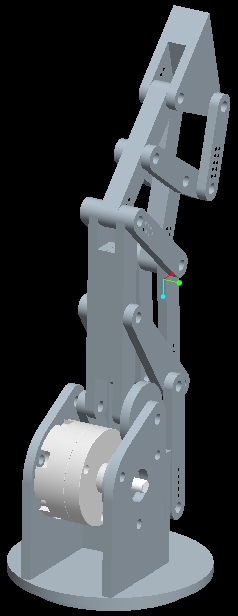
- Cable routing on back of finger to apply internal forces instead of inside finger structure
- Cables tie back to hydraulic slave cylinders in the base, so no hydraulic routing through finger.
- Drawback of vane-type rotary actuators is leakage between two sides of hydraulic system
- Add a valve/check valve for zeroing the position of the fingers and equalizing the hydraulics.
- Should look at exactly what we want to do for the demo
- Determine what the capabilities of the demo hand
- Probably similar to the grasp renderings above
- Sensors in the finger
- One encoder on the gear orienting the fingers
- Need at least 3 position sensors per finger
- placement is flexible
- likely use 4+ per finger for redundancy and perhaps optimizing linearity
- Converting models
- Get a version of the hand/fingers up on basecamp so that energid can look at converting these linkages (might need to do some custom work)
- Notify Jim Bacon - does the work on the Solidworks converter
- Next meeting in 2 weeks, without Roald
Ideas, requests, problems regarding TWiki? Send feedback