new web: http://bdml.stanford.edu/pmwiki
TWiki > RisePrivate Web>PrivateRiSE>NewDesignIdeasOct28 (28 Oct 2005, SalomonTrujillo)
RisePrivate Web>PrivateRiSE>NewDesignIdeasOct28 (28 Oct 2005, SalomonTrujillo)
Some Design Ideas for a new climbing platform
Body Design
These slides cover concepts that could be important for a flexible body and discuss methods of body, tail and leg articulation. - From SangbaeKim?- Robot Body Designs
- MVI_6526.AVI: short videoclip of body articulation
- versatile front legs with searching and gripping capability.
- powerful rear legs coupled together for primary thrusting.
- Slides and pics:
- Underactuated rear leg design
- Left-right pinch DOF idea
- Highly underactuated body design.
- Slides:
Foot Actuation
These slides show two possible ideas for generating actuation on the new platform at the foot. Having actuation would increase our ability to climb with spiny feet substantially. Engagement and disengagement problems would become trivial, and the number of toes necessary to climb a given surface would decrease becasue a much higher percentage of toes catch when some normal force (into the wall) is applied. Keeping the number of toes per foot we have now would allow us to climb smoother surfaces because multiple toes would catch and support the robot instead of only one or two as happens now on semi-rough walls. Two ideas are presented: One for an independently controlled cable that would require a small lightweight actuator for each foot and Two, and alternative approach that couples the DOF to the crank motion of the foot, creating normal force at the foot without the use of additional actuators. -- From AaronParnessOther General Body Ideas
- 1-DOF Posture Change Actuator for Running vs. Climbing (body hinge in midline of torso?)
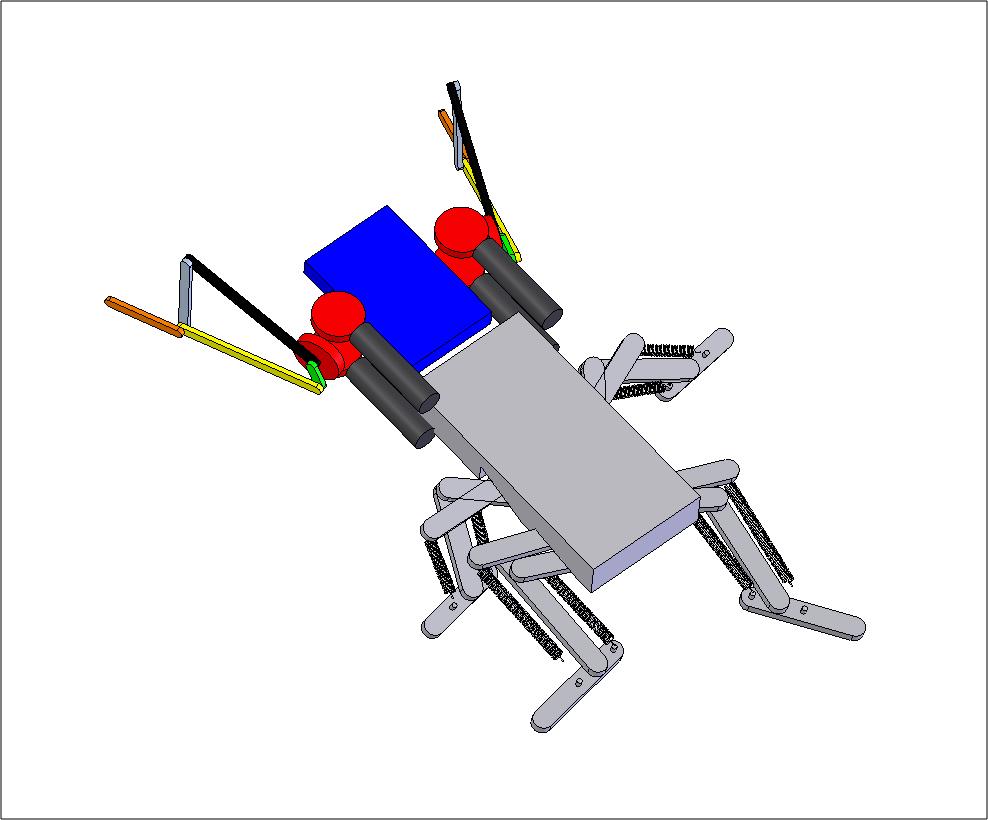
Platform Concept Pics
- Hexapod Concept:
Ideas, requests, problems regarding TWiki? Send feedback