new web: http://bdml.stanford.edu/pmwiki
TWiki > RisePrivate Web>StaticModeling? > FrictionAdhesionOptimization > FrictionalAdhesionPaperFigures>AnisotropicIsotropicExample (18 Apr 2006, DanielSantos? )
RisePrivate Web>StaticModeling? > FrictionAdhesionOptimization > FrictionalAdhesionPaperFigures>AnisotropicIsotropicExample (18 Apr 2006, DanielSantos? )
-- DanielSantos? - 18 Apr 2006
- Planar Model with 2 Contact Points, Stride Length symmetric about COM
- Mass = 50 grams
- COM Height = 2cm
- Stride Length = 10cm
- Isotropic Embedded Cone Model (mu, a)
- Mu = 1
- a -> chosen so that over 0 to 180 degrees, some angle is critically stable
- Anisotropic Frictional Adhesion Model (mu, alpha, Fmax)
- Mu = 1
- Alpha = 30 degrees
- Fmax -> chosen so that over 0 to 180 degrees, some angle is critically stable
- GP1.jpg:
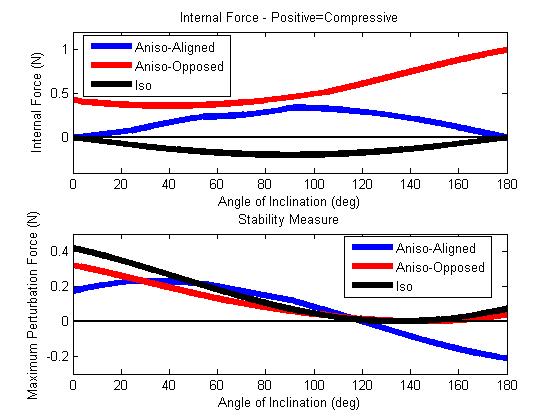
- Anisotropic & Aligned
- Anisotropic & Opposed
- Isotropic
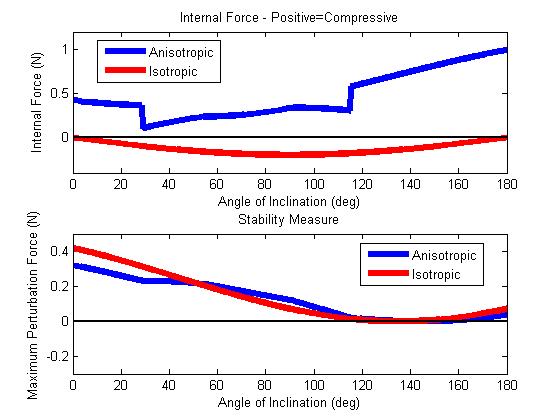
- GP2.jpg:
Ideas, requests, problems regarding TWiki? Send feedback