new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > ClimbingConcepts > ClawConcepts>UnderActuatedFrontLeg (07 May 2004, MarkCutkosky)
Rise Web>ClimbingRobot > ClimbingConcepts > ClawConcepts>UnderActuatedFrontLeg (07 May 2004, MarkCutkosky)
Underactuated front limb concept and prototype
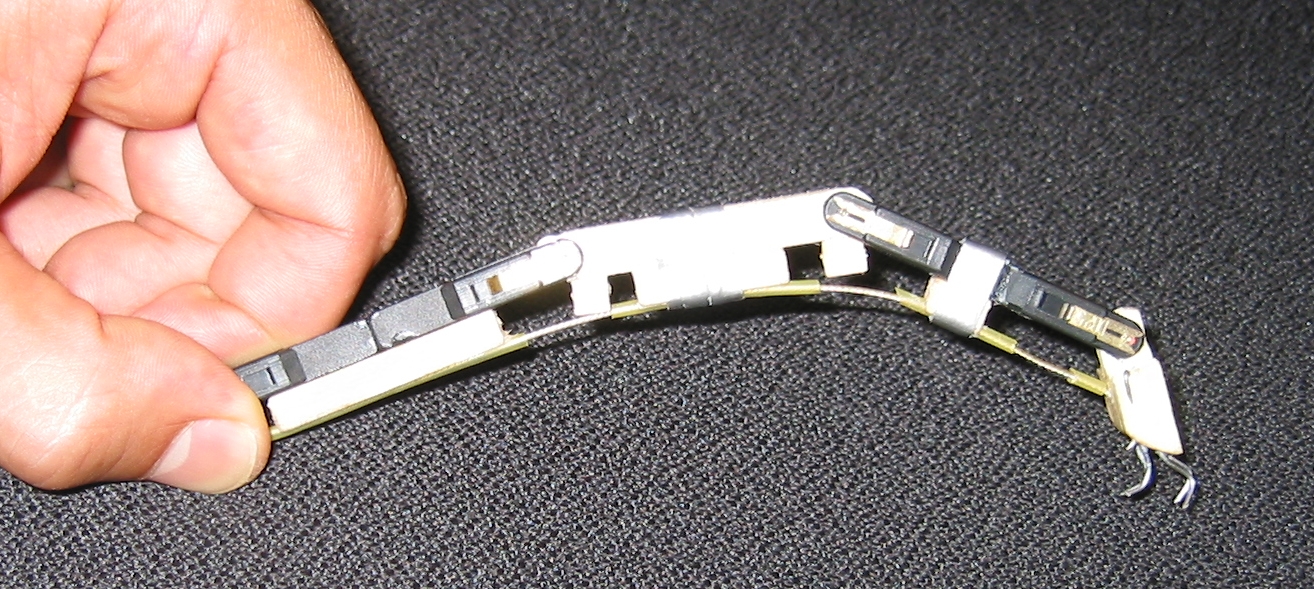
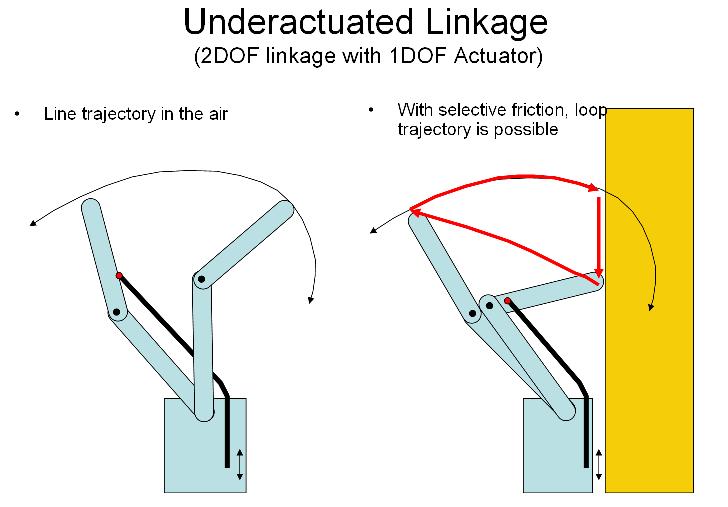
May 6, 2004 SangbaeKimOne big advantage of underactuated leg design is "Adaptive compliance" in stride scale. It doesn't have fixed trajectory in saggital plane but adapts geometry of wall and change its trajectory autometically. A first video of an interesting underactuated front limb and claw by SangbaeKim. This design uses a single cable in a sheath. By controlling the torsional stiffness at each joint, and the distance between the cable centerline and joint at each axis, one can specify the torque distribution. This concept is based on some previous work by S. Hirose and others on underactuated fingers for robot hands.]
Close up photo of mechanism
 More stuff posted in the Climbing Prototypes Docushare folder
-- MarkCutkosky for SangbaeKim? - 28 Jul 2003
More stuff posted in the Climbing Prototypes Docushare folder
-- MarkCutkosky for SangbaeKim? - 28 Jul 2003 - under actuated linkage shematics:
Ideas, requests, problems regarding TWiki? Send feedback