new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > StickyBot > StickyBotIII > SB3Electrical>SB3HallEffectMounting (28 Jun 2010, SalomonTrujillo)
Rise Web>ClimbingRobot > StickyBot > StickyBotIII > SB3Electrical>SB3HallEffectMounting (28 Jun 2010, SalomonTrujillo)
The hall effect sensors are mounted out on the various limbs and thus we must run wires back to the sensor board. The problem lies in providing strain relief since these sensors move. We tried several mounting techniques before settling on this one which seems to work well.
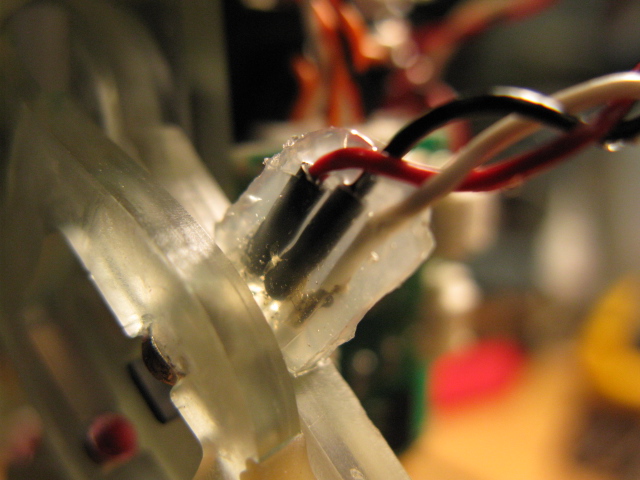
Each limb has three holes for the leads of the sensor. On one side, there is a recess for the sensor. On the other side, three grooves for the leads. We use a small drop of superglue to hold the sensor in the recess. Then the leads are folded over and pressed into the grooves (they won't stay initially) and a small pair of needle-nose pliers are used to crease the fold in the wire (be careful, you don't want to seriously weaken the wire, but the crease will weaken it some.) After the leads are in place, put some small bends in the leads to jog the leads to the midpoint of the limb.
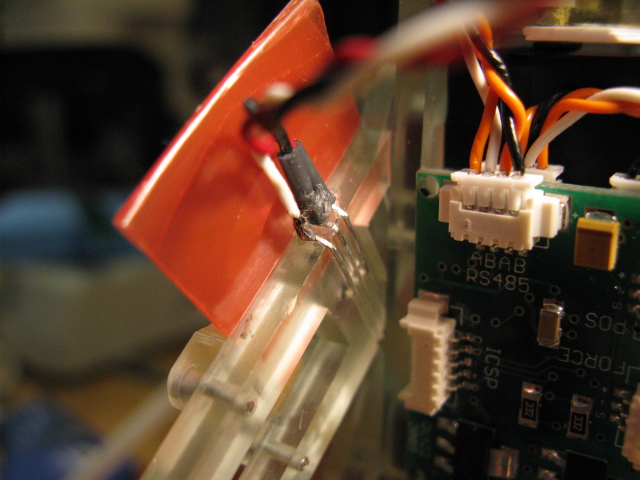
Solder three wires to the sensor's leads. Since space is restricted, we suggest placing shrink tube on the center wire, but leaving the other two free.
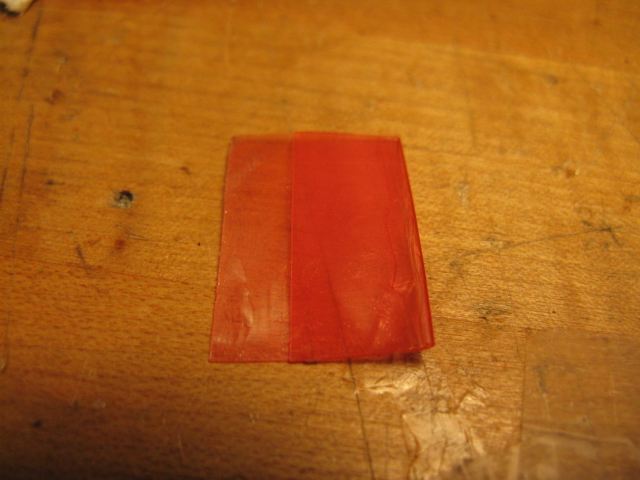
At this point, we need two pieces of red tape to form the side of the hot glue mold. Fold over the red tape, but leave a bit of sticky material exposed.
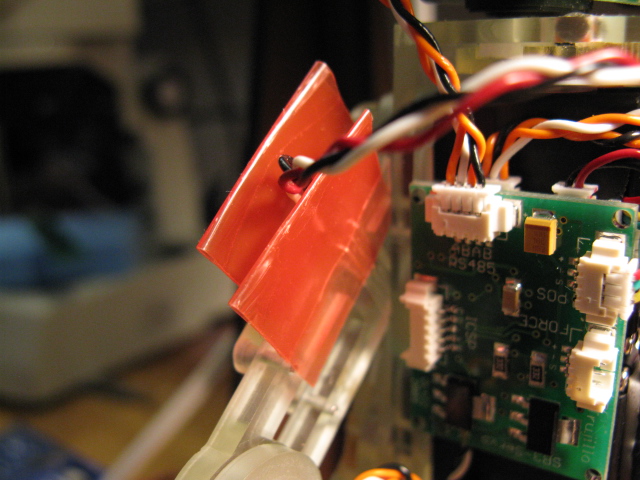
Place one piece of red tape on each side of the leads.
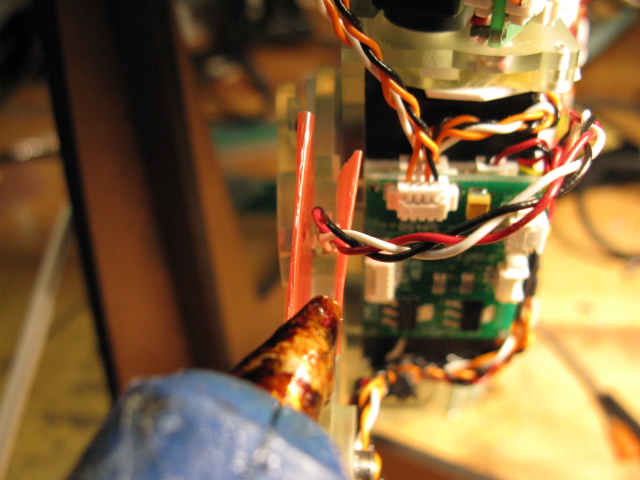
Separate the two flaps and generously squirt hot glue into our mold.
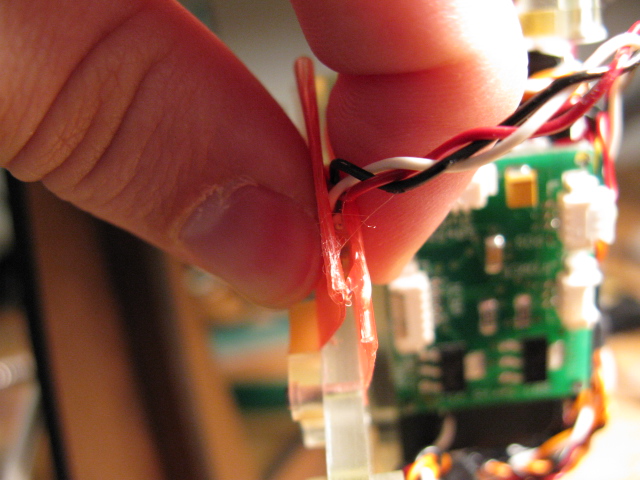
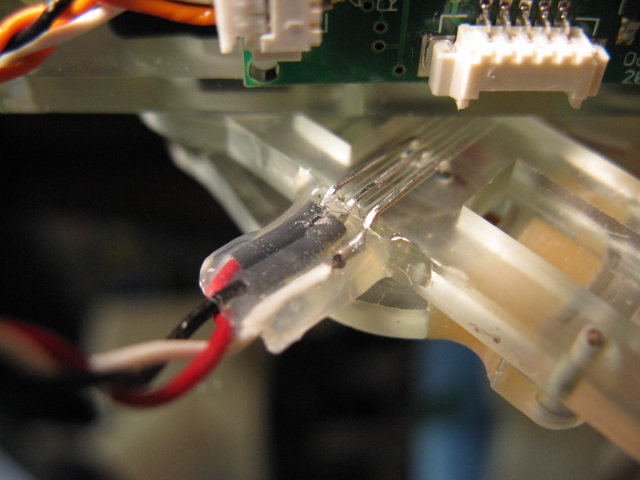
ALLOW A BIT OF COOLING FIRST! Once the glue reaches a warm temperature (as hot as you can comfortable stand) squeeze the two flaps together. Make sure to bias yourself in one direction in case the wires have to clear a particular surface on the robot when the joint moves.
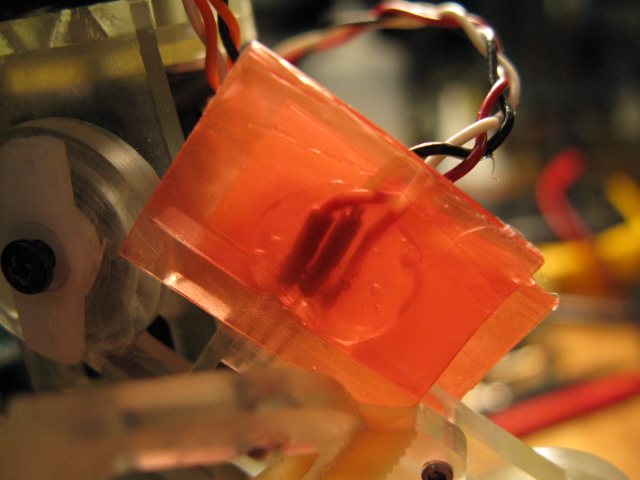
After you feel the glue cool and harden, this is what you should see.
Peel off the tape.
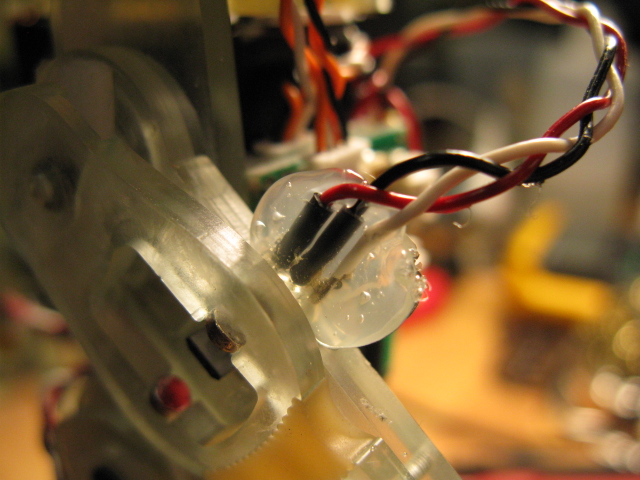
Trim the excess glue off.
Use an old soldering tip to give the wire relief a small fillet where it meets the limb.
This technique as worked fairly well where others have resulted in broken wires. I expect these will also break over time, so please feel free to try to figure out a better system.
-- SalomonTrujillo - 28 Jun 2010
Wire Relief for Hall Effects
We are essentially creating wire relief using hot glue.Each limb has three holes for the leads of the sensor. On one side, there is a recess for the sensor. On the other side, three grooves for the leads. We use a small drop of superglue to hold the sensor in the recess. Then the leads are folded over and pressed into the grooves (they won't stay initially) and a small pair of needle-nose pliers are used to crease the fold in the wire (be careful, you don't want to seriously weaken the wire, but the crease will weaken it some.) After the leads are in place, put some small bends in the leads to jog the leads to the midpoint of the limb.
Solder three wires to the sensor's leads. Since space is restricted, we suggest placing shrink tube on the center wire, but leaving the other two free.
At this point, we need two pieces of red tape to form the side of the hot glue mold. Fold over the red tape, but leave a bit of sticky material exposed.
Place one piece of red tape on each side of the leads.
Separate the two flaps and generously squirt hot glue into our mold.
ALLOW A BIT OF COOLING FIRST! Once the glue reaches a warm temperature (as hot as you can comfortable stand) squeeze the two flaps together. Make sure to bias yourself in one direction in case the wires have to clear a particular surface on the robot when the joint moves.
After you feel the glue cool and harden, this is what you should see.
Peel off the tape.
Trim the excess glue off.
Use an old soldering tip to give the wire relief a small fillet where it meets the limb.
This technique as worked fairly well where others have resulted in broken wires. I expect these will also break over time, so please feel free to try to figure out a better system.
-- SalomonTrujillo - 28 Jun 2010
Ideas, requests, problems regarding TWiki? Send feedback