new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>TWikiUsers > JonathanKarpick>RocrSim (15 Aug 2008, JonathanKarpick)
Rise Web>TWikiUsers > JonathanKarpick>RocrSim (15 Aug 2008, JonathanKarpick)
Simulation of Will's ROCR climber over at the University of Utah.
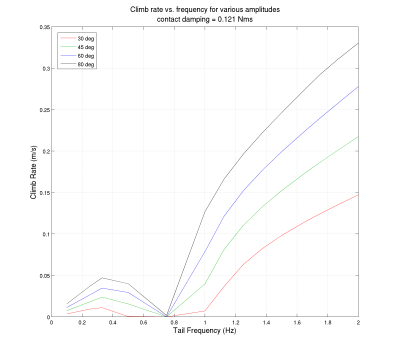
Interesting frequency sweep - 15aug08
Updated ROCR version dactyl sims - 14aug08
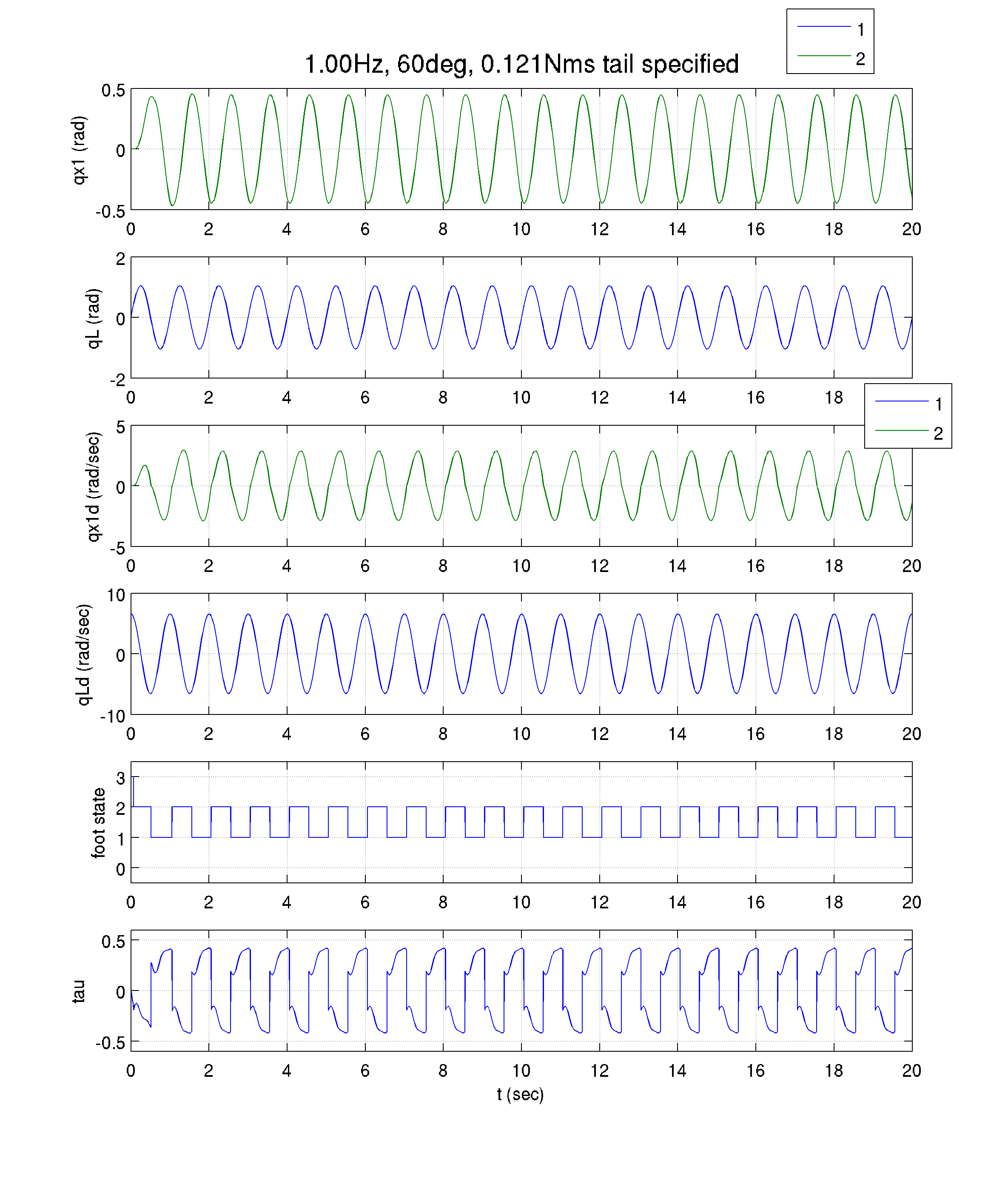
- 1Hz 60deg 0.121b - contact damping adjusted to match experimental climb rate of 0.0786 m/s
- Same run, video at 1/4 speed
Initial dactyl-sims - 13aug08
Notes and movies from 08 August 2008
- ROCR Update - 08aug08
- High contact damping - steady state
- High contact damping - initial settling to steady state
- Low contact damping - steady state
- Low contact damping - no settling from initial to steady state
- Raibert hopper - period 1
- Raibert hopper - period 2
- Raibert hopper - period 3
- Raibert hopper - chaos
Notes and movies for 17 July 2008
- Notes for 17 July 2008 telecon
- ROCR-1.10Hz-75deg-0.9Nm-0.05b-50deg_sw-20.00kp-1.00kd.mp4: ROCR - specified tail trajectory @ 1.1Hz, 75deg amp, switch at 50 deg
- ROCR-spec-tau-0.05b-45--50--44--222-6n.mp4: Results of DIRCOL optimization with n=6
Older stuff
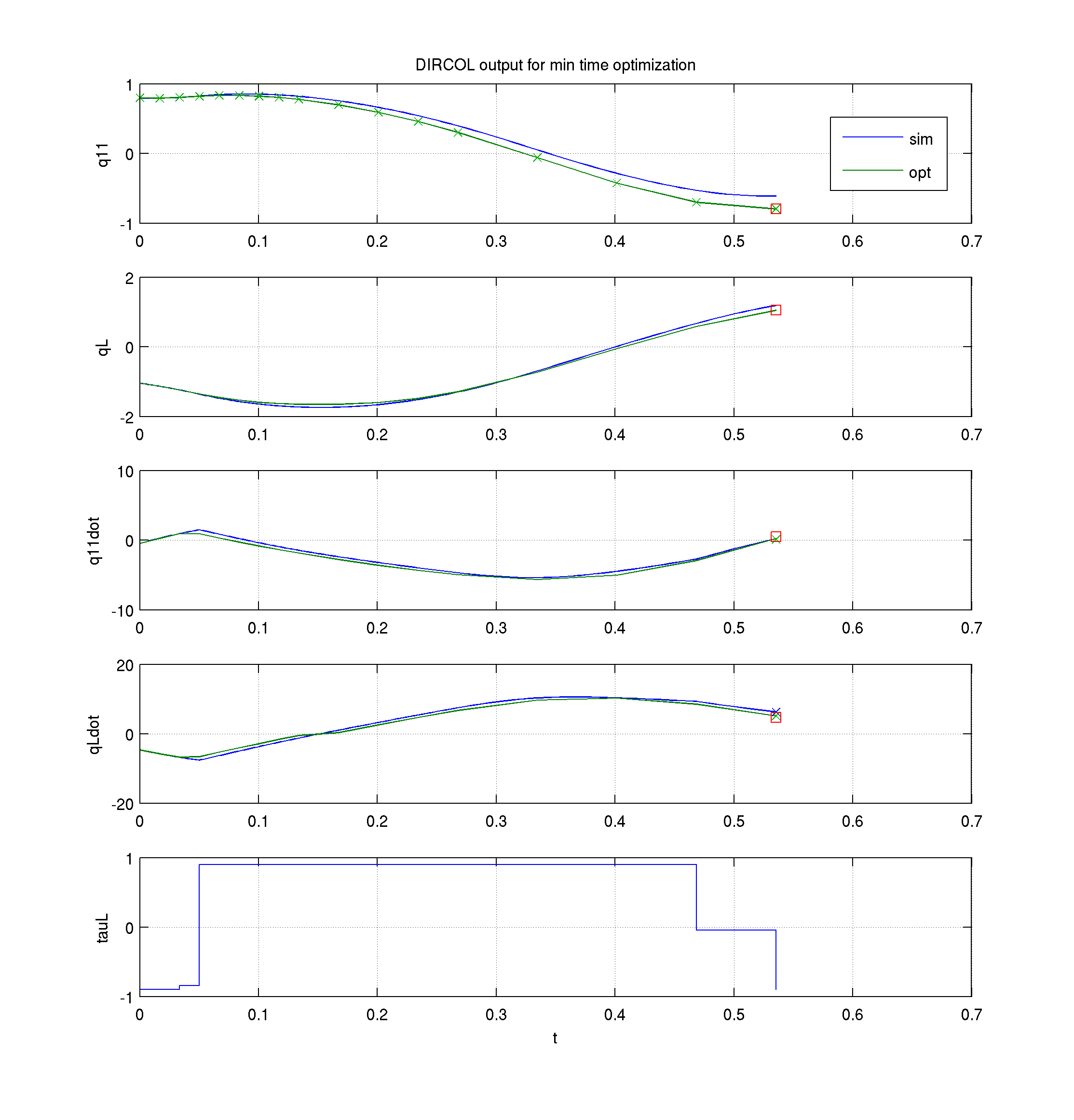
Optimization goodness and weirdness
- ROCR-spec-tau-0.05b.mp4: Specified torque vs. time w/ b=0.05 Nms
- Estimate steady state switching conditions from one of the below runs (for this case, q1=45deg, qL=-60deg, q1dot=-27deg/sec, qLdot=-266deg/sec).
- Run a minimum time optimization with tau_max = 0.9 in DIRCOL
- Use the NEGATIVE of the resulting torque profile in simulation (the negative was a mistake, but it works, and using the torque profile directly from DIRCOL doesn't. That's really weird.)
- The resulting climber has a pretty large basin of attraction for steady state climbing - it may take a while to get to steady state depending on the IC, but it has in my random tests...)
- DIRCOL output:

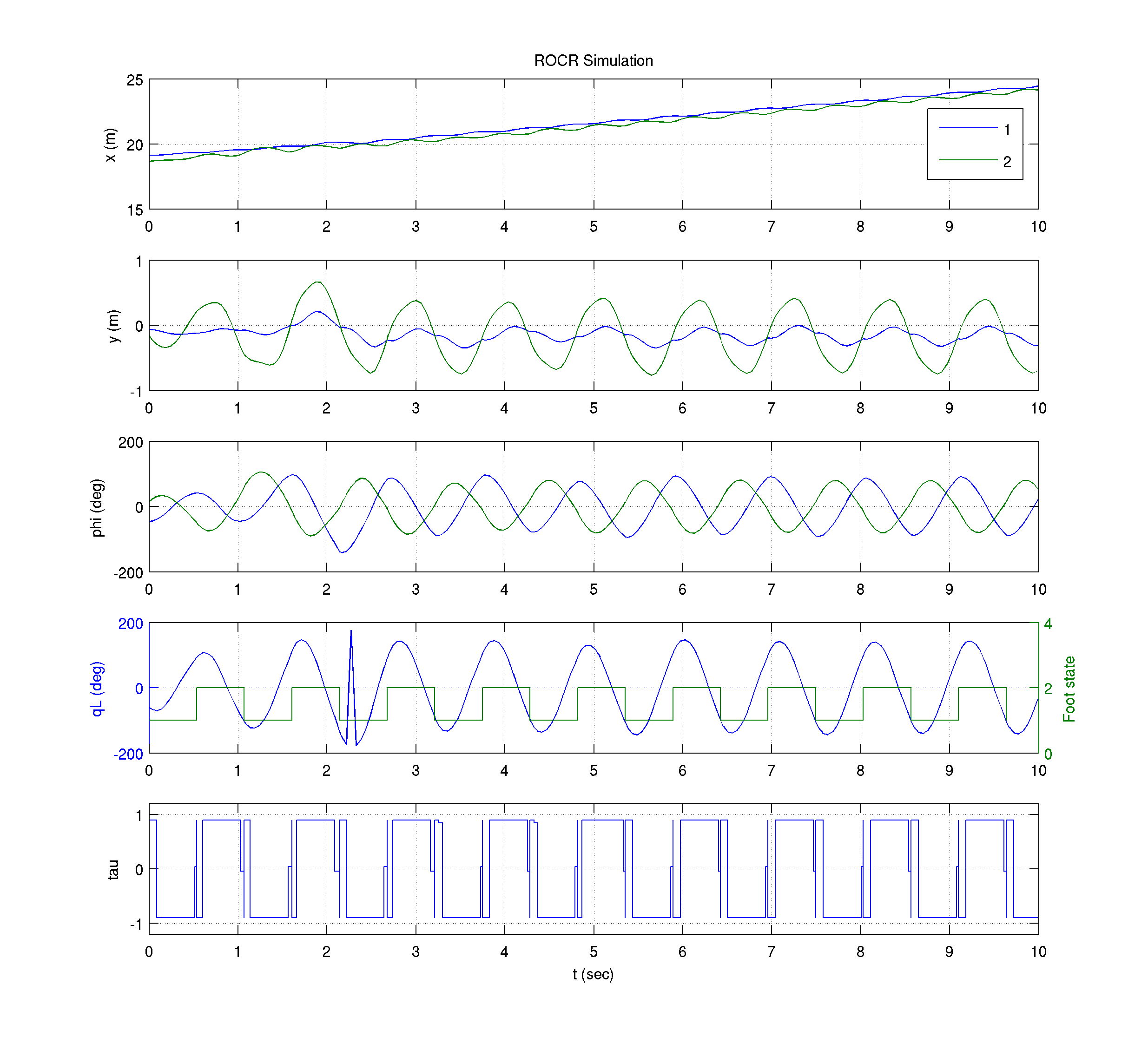
- Simulation time history:
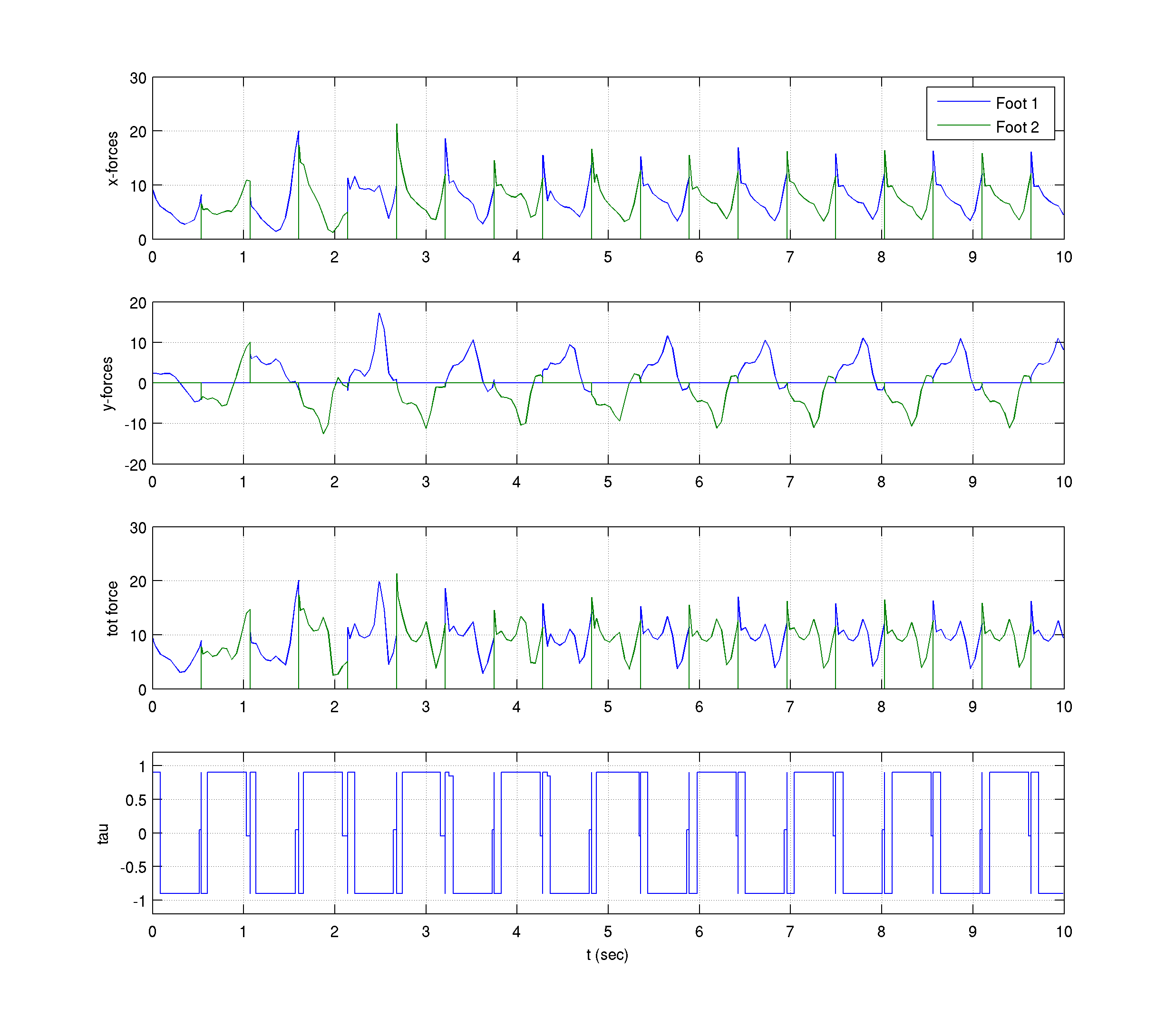
- Simulation wall reaction forces:
AHA!
- ROCR-0.90Hz-75deg-0.9Nm-0.005b-20.00kp-1.00kd.mp4: ROCR: drive tail to 0.90Hz, 75deg amplitude, max 0.9 Nm torque, contact damping of 0.005 Nms/rad, Kp=20, Kd=1 IC: thetB=60deg, qL=45deg
- ROCR-0.90Hz-75deg-0.9Nm-0.0005b-20.00kp-1.00kd.mp4: ROCR: drive tail to 0.90Hz, 75deg amplitude, max 0.9 Nm torque, contact damping of 0.0005 Nms/rad, Kp=20, Kd=1 IC: thetB=60deg, qL=45deg
- ROCR-bang-bang-0.9Nm-90deg-0.005b.mp4: ROCR: "simple" bang-bang control, switch feet at +/-90 deg, max 0.9 Nm torque, contact damping of 0.005 Nms/rad, IC: thetB=60deg, qL=45deg
- ROCR-bang-bang-0.9Nm-80deg-0.005b.mp4: ROCR: "simple" bang-bang control, switch feet at +/-80 deg, max 0.9 Nm torque, contact damping of 0.005 Nms/rad, IC: thetB=60deg, qL=45deg
Fixed tail trajectory ensures switching of hand holds, which makes climbing a bit more sure
- ROCR-0.90Hz-75deg-0.005b-fix.mp4: ROCR: drive tail to 0.90Hz, 75deg amplitude, contact damping of 0.005 Nms/rad, Fixed tail trajectory IC: thetB=60deg, qL=45deg
- ROCR-0.90Hz-75deg-0.01b-fix.mp4: ROCR: drive tail to 0.90Hz, 75deg amplitude, contact damping of 0.01 Nms/rad, Fixed tail trajectory IC: thetB=60deg, qL=45deg - doubling the contact damping : A bit more stable until the end
- ROCR-0.90Hz-75deg-0.02b-fix.mp4: ROCR: drive tail to 0.90Hz, 75deg amplitude, contact damping of 0.02 Nms/rad, Fixed tail trajectory IC: thetB=60deg, qL=45deg - again doubling the contact damping - a little more stable
Very sensitive to controller gains - tracking specified tail trajectory makes for rather iffy climbing
- ROCR-0.75Hz-60deg-350.0Nm-0.005b-70.00kp-1.00kd.mp4: ROCR: drive tail to 0.75Hz, 60deg amplitude, max 350 Nm torque, contact damping of 0.005 Nms/rad, Kp=70, Kd=1 IC: thetB=60deg, qL=45deg
A "simple" bang-bang controller, where the maximum torque is always applied to the tail motor, in the direction so that the acceleration of the main body is always up the climbing surface. The feet switch when the main body is with 15 degrees of +/- 90 degrees
- ROCR-bang-bang-10.0Nm-90deg-0.005b.mp4: ROCR: "simple" bang-bang control, switch feet at +/-90 deg, max 10 Nm torque, contact damping of 0.005 Nms/rad, IC: thetB=60deg, qL=45deg
- ROCR-bang-bang-1.0Nm-90deg-0.005b.mp4: ROCR: "simple" bang-bang control, switch feet at +/-90 deg, max 1 Nm torque, contact damping of 0.005 Nms/rad, IC: thetB=60deg, qL=45deg
Older stuff - likely mistakes in simulation:
- oops.mp4: Wrong way!!
- static3.mp4: "Static" climbing with thetBmax = 70deg
- static2.mp4: "Static" climbing with thetBmax = 90deg
Servo gains a bit too high on these: Kp=12.5 Nm/rad : Kd = 0.4 Nms/rad
- ROCR-75Hz-60deg-0p9Nm-5e-4b.mp4: ROCR: drive tail to 0.75Hz, 60deg amplitude, max 0.9 Nm torque, contact damping of 0.0005 Nms/rad, IC: thetB=45deg, qL=45deg - Interesting behavior at 10 seconds!!
- ROCR-75Hz-60deg-0p9Nm-5e-3b.mp4: ROCR: drive tail to 0.75Hz, 60deg amplitude, max 0.9 Nm torque, contact damping of 0.005 Nms/rad, IC: thetB=45deg, qL=45deg
- ROCR-75Hz-60deg-0p9Nm-1e-3b.mp4: ROCR: drive tail to 0.75Hz, 60deg amplitude, max 0.9 Nm torque, contact damping of 0.001 Nms/rad, IC: thetB=45deg, qL=45deg
- ROCR-75Hz-60deg-0p9Nm-2e-3b.mp4: ROCR: drive tail to 0.75Hz, 60deg amplitude, max 0.9 Nm torque, contact damping of 0.002 Nms/rad, IC: thetB=45deg, qL=45deg
Testing out lower servo gains:
If the gains are too low, you don't get enough torque, and ROCR can't climb. Too much, and you tend to end up in the pump-up state, where ROCR starts spinning out of control.- ROCR-75Hz-60deg-0p9Nm-5e-4b-5p0kd-0p27kd.mp4: ROCR: drive tail to 0.75Hz, 60deg amplitude, max 0.9 Nm torque, contact damping of 0.0005 Nms/rad, Kp=5.0, Kd=0.27 IC: thetB=45deg, qL=45deg
- ROCR-0.75Hz-60deg-0.9Nm-0.0005b-7.00kd-0.27kd.mp4: ROCR: drive tail to 0.75Hz, 60deg amplitude, max 0.9 Nm torque, contact damping of 0.0005 Nms/rad, Kp=7.0, Kd=0.27 IC: thetB=45deg, qL=45deg
- ROCR-0.75Hz-60deg-0.9Nm-0.0005b-5.00kp-0.27kd.mp4: ROCR: drive tail to 0.75Hz, 60deg amplitude, max 0.9 Nm torque, contact damping of 0.0005 Nms/rad, Kp=5.0, Kd=0.27 IC: thetB=45deg, qL=45deg - I like the struggle to get to the next grasp in the middle here.
- ROCR-0.75Hz-60deg-0.9Nm-0.0005b-5.25kp-0.27kd.mp4: ROCR: drive tail to 0.75Hz, 60deg amplitude, max 0.9 Nm torque, contact damping of 0.0005 Nms/rad, Kp=5.25, Kd=0.27 IC: thetB=45deg, qL=45deg
Ideas, requests, problems regarding TWiki? Send feedback