new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > LegDesign>LegPlatformDevelopment (23 Jan 2011, MarkCutkosky)
Rise Web>ClimbingRobot > LegDesign>LegPlatformDevelopment (23 Jan 2011, MarkCutkosky)
-- MarkCutkosky - 01 Aug 2003 -- MarkCutkosky - 14 Aug 2003: Added Anchors for Inchworm, Four-bar concepts, Lego Guy and Lego Guy Plus in the text below
MarkCutkosky April 8, 2006 -- Creating a new page for ArticulatedBodyDesigns MarkCutkosky May 27, 2004 Adding a new page, after the April site visit, for FootLegDevelopmentPlan
I am currently experimenting with simple platforms and legs for a climbing robot. The ideas being examined are:
MarkCutkosky April 8, 2006 -- Creating a new page for ArticulatedBodyDesigns MarkCutkosky May 27, 2004 Adding a new page, after the April site visit, for FootLegDevelopmentPlan
Older stuff...
-- AdamPrickett? - 30 Jun 2003I am currently experimenting with simple platforms and legs for a climbing robot. The ideas being examined are:
- center of gravity very close to wall
- simple mechanisms with claws, friction, pins
- center of gravity near front contact points (to minimize pitching moment)
- a fan to provide addition normal force for contact points
- a rubber belt drive at the rear of the platform for additional stability and friction on smooth surfaces
- a simple mechanism to achieve Gecko-like limb movements with as few d.o.f. as possible
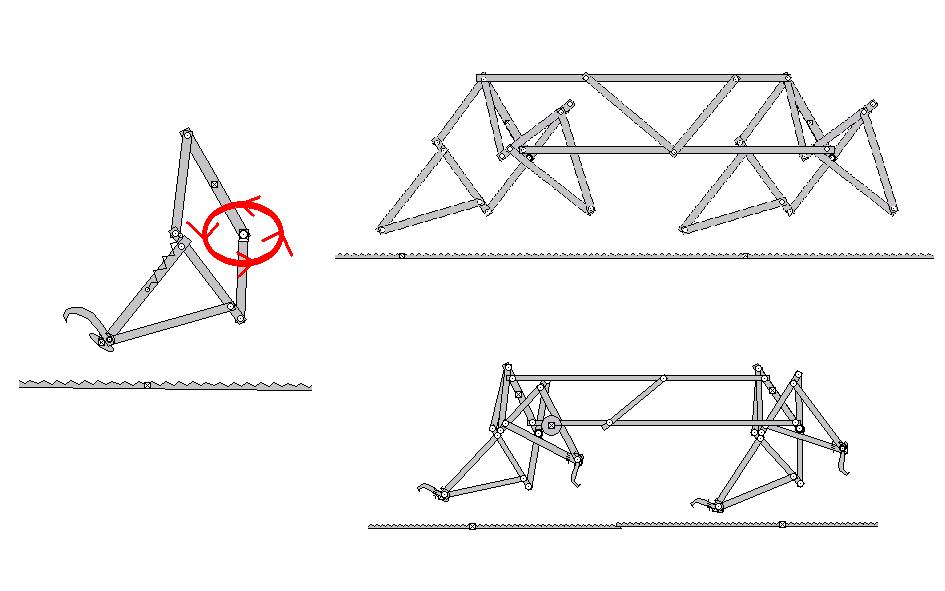
- 4-Bar Lego Walker:
- FourBar.mov: Here I explored the 4-bar linkage idea with Legos (linkage is the same as the simulations below)
- Working Model simulations of 4-Bar leg design:
- 4BarFoot2.avi: Single leg with spring-activated foot
- 4BarBot4.avi: 4-legged robot without feet
- 4BarFoot.avi: 4-legged robot with spring-actuated feet
- zip file with Power point presentation and embedded movies showing various explorations of 4-bar and pantograph mechanisms and Working Model planar robot simulations that employ them. (Download this .zip file and unzip into a single folder.)
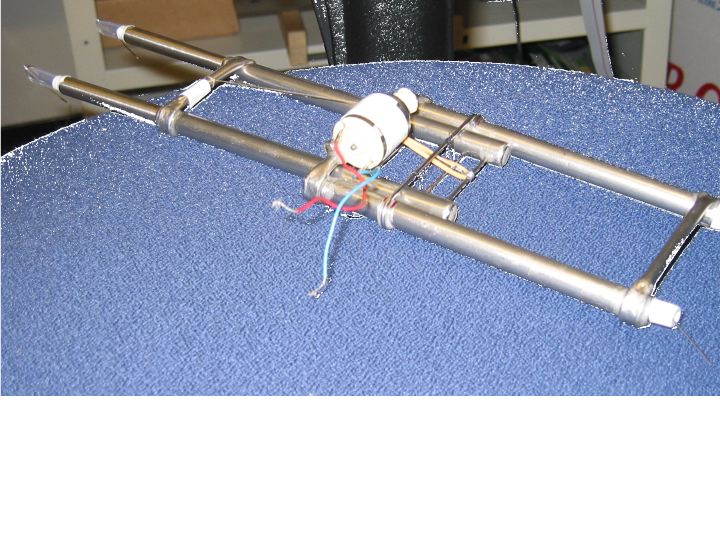
- Inchworm-Made to explore simple climbing mechanism:
 #LegoGuy
#LegoGuy
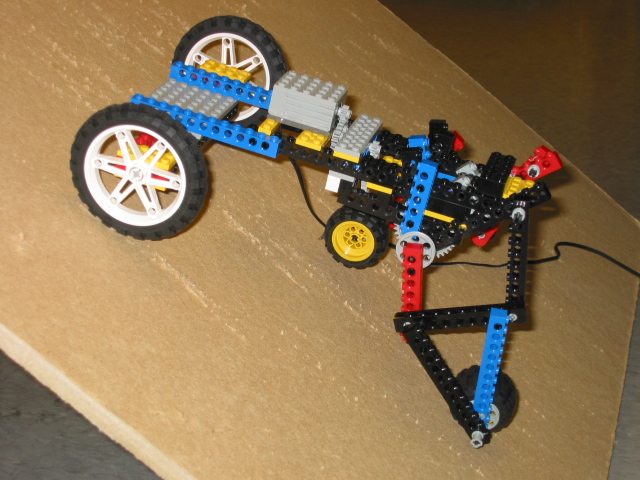
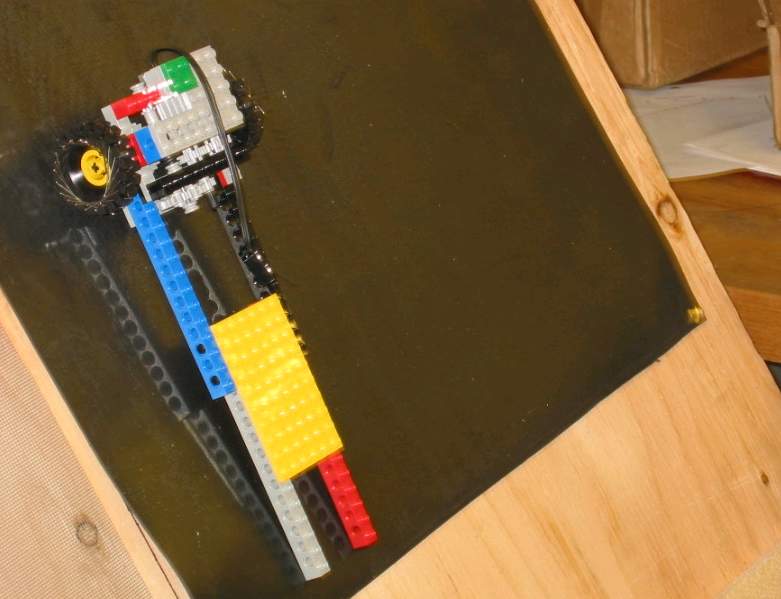
- Lego guy with spiked wheels climbs 60 degree slope:

- MVI_2377.AVI: Movie of Lego Guy on 60 degree slope of paper, rubber, cork
- A few observations that I have made so far: Because each wheel has so many pins, if a pin fails to hold on one side there is only a short delay before another pin is driven toward the surface. Even if multiple pins fail to gain purchase in the material, the other wheel and rear contacts of the robot keep him from sliding or rotating significantly. Some ideas I will be exploring next include increasing the diameter of the spiked wheels for greater ground clearance, adding a rear tread to the robot, making the front axle and motor/transmission free to flex relative to the body of the robot, changing the angle of the pins relative to the wheel, changing the length of the pins, and placing rotating spiked wheels on separate limbs for negotiating obstacles. I'm fairly sure that with this design (as soon as I try slightly larger wheels) the transition between horizontal motion and vertical will be easy, and a transition from vertical over a cliff to horizontal may even be possible (if there is a concave region behind the front wheels so that the robot's center of mass can be raised above and slightly over the cliff edge before the rear of the robot breaks contact with the cliff face). Fingers crossed!
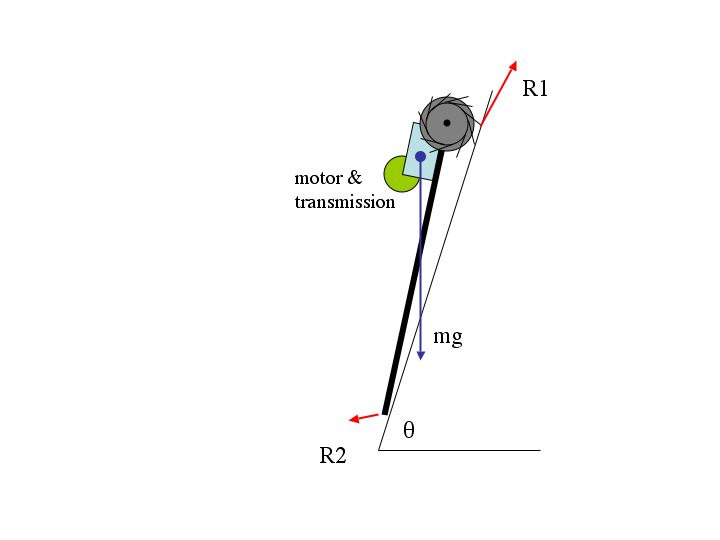
- Force diagram for Lego guy showing why it works surprisingly well on nearly vertical surfaces. Front wheel with pins pulls upward and slightly inward; rear "limb" drags lightly. Center of mass is near front contact.
 #LegoGuyPlus
#LegoGuyPlus
- Lego guy with added propeller for better traction:
- MVI_2391.AVI: Lego Guy Plus (with fan) on 75 degree slope (cork) Way cool! -- this is now the closest functional equivalent we have to PartridgeThrust -- MarkCutkosky - 13 Aug 2003
- Latest prototype of Lego Guy. Real fan, claw wheels:
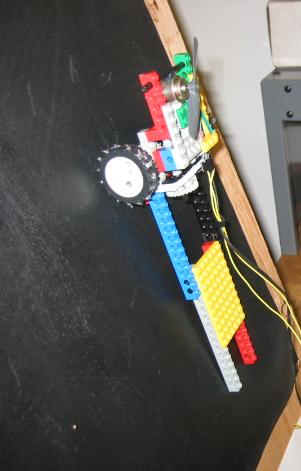
- MVI_2474.AVI: Lastest footage of Lego Guy Plus
- the climbing Docushare folder
- the RobotPlatform pages
- the IndependentSprawl page by SangbaeKim
Ideas, requests, problems regarding TWiki? Send feedback