new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>TWikiUsers > KarlinBark>KarlinJournal (15 Jun 2009, PeteShull)
Rise Web>TWikiUsers > KarlinBark>KarlinJournal (15 Jun 2009, PeteShull)
Sept 7
Completed a perception experiment on myself to test the different end effectors-- Used benchtop device to keep the contact points the same
- Tested Fixed and Free configurations of the end effectors
- Stimulus always started from zero and moved to a random position at a semi-random speed and I used the knob to report what position I thought the end effector was at. Prior to the experiment, I moved the device within a range of motion that was comfortable to me, and also a range in which slip did not occur.
- I tweaked the experiment a little so that the user has more control over positioning the knob (reduced gain), I included markings to help the user as well.
- With the markings, as expected- the variation appeared to be a little smaller than in previous studies
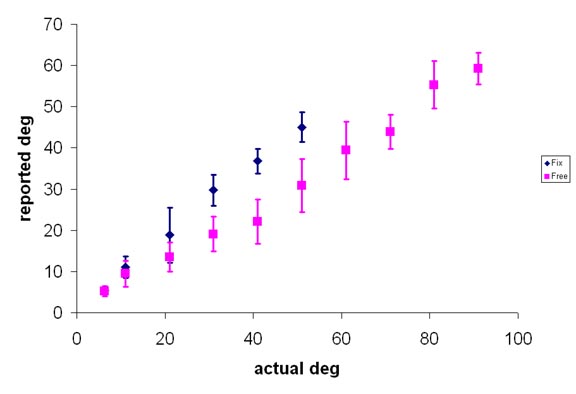
- Perceived Degrees vs. Actual Degrees- you can see there's not too much that's interesting here. The Freely rotating end effector has a larger range of motion which is shown here, but I don't think it necessary translate to increased number of points that can be perceived.
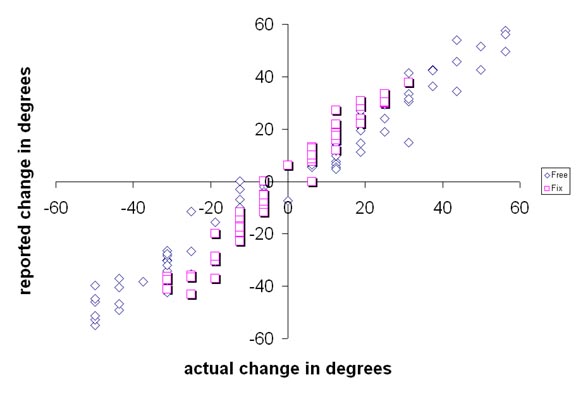
- Though the reported degrees varied, the relative change in stimuli, compared to the previous stimulus, was always perceived correctly. For example, if stimulus 1 was 8 degrees and stimulus 2 was 15 degrees, I correctly reported a higher number for stimulus 2, even though the absolute measurement was off. The change in stimulus was always detected correctly.
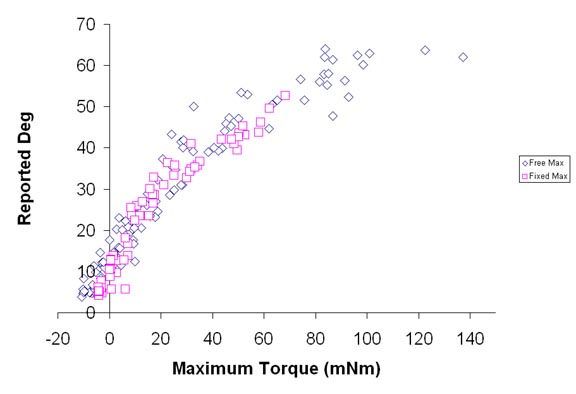
- With the benchtop, I was able to measure the torques applied during the experiment. Here is a plot of reported degrees versus maximum torque applied. You can see there is a nice relationship between the two. I think there is an exponential decay simply because I am too familiar with the experiment and skin stretch itself. I knew that the torque would decrease over time, so if a stimulus felt strong, I knew it was the maximum, even if it was smaller in magnitude compared to earlier in the trials.
May 11
I ran some perception experiments on myself- I tried Jason's idea of moving the end effector in a random trajectory before settling upon the desired location, then trying to figure out where it was. With the benchtop device, I found that I would start to loose circulation in my arm (!!) and the task became quite uncomfortable after 10 minutes or so. Also, the issue of moving my arm slightly during the experiment was a factor again- I would get tired, try to re-adjust my arm, then move the "zero" location, which ruined my sense of calibration. So- I thought, maybe I could try to use the portable device for this...and- with the portable device, the main issue is that the end effector is still not what I want it to be, and the motor heats up quite a bit. The heat emanating from the motor can be felt on the arm and it gets pretty hot. I think there needs to be a metallic barrier or something between the motor and the arm. the accuracy of the hall effect sensor and overall robustness of the device are also small issues.May 8
Ok- so I tried the very slow detection threshold test with Jason, and there was one very key observation.- Jason's detection threshold was much lower than mine...mine was around 10 degrees, and Jason's was around ~5 degrees...maybe less.
- the main (suspected) cause of this discrepancy? Hair.
- Jason noted that he could feel the hair on his skin tugging, and that was what set off his sense that "something" had changed. This makes sense of course because we're extremely sensitive to our hair movement...we can feel small changes, or feel if wind has blown over our hair.
- the main (suspected) cause of this discrepancy? Hair.
May 7
whoops- didn't update for awhile- Portable device was built with SDM- it's pretty neat
- end effector needs work- the "compliant" material is too stiff and the manufacturing process with silicone isn't working that well. I tried putting less compliant material in the gaps, and it was still too stiff.
- the tolerances for the end effector should be a little wider too to decrease the friction. Possibly different material?
- detection threshold tests
- velocity is a huge factor and it is extremely difficult to decouple static perception and dynamic perception.
- I tried applying skin stretch at extremely low speeds to see what the detection threshold was- i would estimate that at low speeds( ~0.25 deg/sec), there is mainly a static perception, which for me is probably somewhere between 10 and 20 degrees depending on how hard on concentrate. That's a large range, but sometimes I would sense the stretch at 12 degrees, and other times, not until it reached 18 or so. The instant I increase the velocity to something along the lines of ~1 deg/sec, the displacement at which I notice my skin is being stretched is around 3 degrees or so. This is most likely more of a dynamic sense. At fast speeds, the end effector only needs to rotate 0.5 degrees for me to notice any change. So the question is, how does this matter? In a realistic application, I would never apply stretch at a speed of 0.25 deg/sec...it's just too slow. However, if we're interested in finding out what the static detection threshold is, this may be the only way to determine that. Does 10 degrees "feel" different from zero? Maybe not. Again, this brings up the question of what effect does velocity have on perception, and more importantly, can we utilize a human subject's ability to integrate to use velocity to communicate information? Because the problem with velocity is that we could rotate the skin 1 degree very quickly and a subject would most likely know that some event occurred and that their skin was displaced a small amount...but after 5 seconds or so, they may forget that the end effector has moved at all due to the fact that the static detection threshold has not been crossed.
- velocity is a huge factor and it is extremely difficult to decouple static perception and dynamic perception.
March 30-April 5
- Finished collecting data for the new journal paper
- 5 subjects total, 1 female, 4 males
- I found that to test subjects in this particular "perception" experiment, it was very difficult to instruct them on what they should do. Early experiments had instructions that were too vague and confusing for the subjects to follow. Instead of reporting an absolute position, a few subjects were reporting "relative" positions, in guessing how much the stimulus moved in reference to the previous stimulus. This is also a valid use of skin stretch- in fact, I found subjects were quite good in determining how far the stimulus had moved (when the stimulus moved at a constant speed). This could be an interesting experiment in the future, where if you vary the speed, you test how well subjects can determine how much the stimulus has rotated (this is close to the propriotion experiment)
- Subjects in general are able to distinguish the 5 different points- however there is clearly a "dead zone" near 0 degrees of stretch in which it is more difficult to tell where the stimulus is.
- The results appear to support the fact that a non-linear mapping was used, though it indicates that an even stronger non-linear mapping would've been more appropriate.
- Though the goal is to somehow compare skin stretch to vibration feedback...in this case, I think it's very difficult to make a fair comparison. In Jason's experiments, he asked his subjects to report their perceived magnitude. While I started out asking my subjects to report a similar number, because of the directional component of skin stretch, subjects would get confused in terms of reporting a perceived magnitude. I asked my subjects to report a position- if they felt the stimulus deviated counterclockwise from the zero position, it was negative degrees, and clockwise was positive degrees- this resulted in much more consistent data.
- Though the results were more consistent when reporting perceived position, there were still some errors in detecting the direction correctly- Most of this was due to the subject's "forgetting" which was was negative. But still, it appears that when subjects are not in control of the stimulus, as they were in the proprioception experiment, it becomes much more difficult to detect direction.
- Worked on finalizing a new end effector design with Joan
- ...there are some ideas in the works
- figuring out a good way to allow the end effector to conform to the curvature of the arm is more challenging...
Things to do...short term
- Finish writing up results for journal submission
- SDM new end effector parts
- Magnitude Perception tests!
March 23-29
- Worked on constructing a prototype of the portable skin stretch device (see Haptics.PortableSkinStretchDesign)
- Surprisingly, the prototype works very well!
- To be able to move your arm while receiving skin stretch feedback was a completely new experience, and it was just so much nicer to not be locked to a table (i.e. using the benchtop device).
- In addition, it was nice to control the skin stretch using the desired position slider in Labview and actually feel it move on the arm. There's something about being able to control the stretch and feeling it.
- Again- it was evident that with skin stretch you just really get a sense of movement (velocity). I don't know how well you can detect what the velocity is, but I think it will be important to use the fact that humans are good at integrating to utilize skin stretch fully. There is still a clear "dead-zone" near 0 degrees of stretch in which it's hard to notice much, but once the rotation passes that mark, it's just very clear when the tactors are moving and when they are not.
- I still think we need compliant end effectors- it's not that when the end effector is rigid that the sensation is bad- it's just that eliminating that "pinching" from the extra shear would make the device feel nicer
- Try to minimize the surface area of the straps
- The angle/height of the constraint/supporting "blocks" is quite important to get right to fit on various arms. Perhaps they should be adjustable or have springs...
- Keeping the surface in which stretch is applied "open" or free of physical constraints makes it feel much closer to the benchtop device- much more than I anticipated. I thought the straps/constraints would have a greater effect in changing the perception from the earlier strain experiments, but in the strain experiments- the constraints were surrounding the end effector. In this case, the constraints are only on 2 sides.
- Found that there was a "minimum speed adjuster" on the ultrasonic motor driver...for some reason this potentiometer is labeled clearly on the online datasheet, but not on the datasheet the company provided us with... :<
- this solves one of the anticipated problems in using the ultrasonic motor to provide skin stretch, using it to apply slow rates of skin stretch. In particular, when tracking the position of an arm and feeding back the position of the arm using skin stretch feedback.
- implemented a crude proportional velocity controller using non-real time Labview and was able to apply skin stretch proportional to a 'tracker' very slowly. Unfortunately, now the opposite problem exists, where if the desired position is changing rapidly, there are some strange vibrations that occur in the motor that did not appear previously. This could possibly be fixed with a better controller- again, all I did was apply a proportional gain to control velocity. However, I don't think this will be a big issue with Jason's experiments because he is expecting to apply skin stretch at slow rates.
- EDIT: Reduced the maximum speed as well, to give motor finer velocity resolution and that helped reduce the "vibrations"
Things to do...short term
- Now that spring break is over- get more subjects to finish up the anticipated journal publication for IEEE haptics
- Discovered that it's best to ask subjects to guess the 'position' of the end effector as it applies skin stretch rather than the absolute magnitude. Because I also want to know their ability to sense the direction, when I asked for a magnitude rating I asked them to write a negative number if the tactor rotated negative degrees and write a positive number for positive degrees. However, this instruction appeared to be confusing to test subjects. The experiment is of course complicated by the fact that in between each stimulus, it is moving randomly to either the min, max, or zero stretch positions. The subjects tended to give me a relative magnitude and would give a negative number if they felt the tactor moving counterclockwise, regardless of the ending position. (i.e. tactor 'starts' at 45 degrees of stretch and moves to 30 degrees- subjects report a negative magnitude because they felt it move in the negative direction- though the rating itself is related to the absolute magnitude perception)
- Update the portable device- (In 310 speak- build FPII)
- Complete magnitude perception tests to help determine whether or not the end effector should be compliant.
Ideas, requests, problems regarding TWiki? Send feedback