new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>FootDesign>IntegratedToe (22 Aug 2005, AlanAsbeck)
Rise Web>FootDesign>IntegratedToe (22 Aug 2005, AlanAsbeck)
Here are some design ideas for the new integrated sticy/spiny toes. Please make some comments and suggestions.
simple inclusion comments: This is the simplest and most straight forward way of including sticky feet features in the new integrated toe. The lamellae will consist of many tiny strings in this design, rather than ridges, however, because each toe's lamellae will be free to contact the surface independently from the toe next to it.
comments: This is the simplest and most straight forward way of including sticky feet features in the new integrated toe. The lamellae will consist of many tiny strings in this design, rather than ridges, however, because each toe's lamellae will be free to contact the surface independently from the toe next to it.
graded inclusion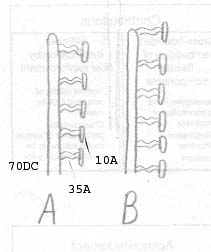 comments: This is a more complicated design for lamellae inclusion that utilizes the range of PU that we have. By putting softer material in a large pad close to the wall, connected to the rigid toe with a semi-soft string, the foot tries to realize the '1000's of strings and pads' idea as well as incorporating the graded elasticity we talked about in the meeting on Friday.
comments: This is a more complicated design for lamellae inclusion that utilizes the range of PU that we have. By putting softer material in a large pad close to the wall, connected to the rigid toe with a semi-soft string, the foot tries to realize the '1000's of strings and pads' idea as well as incorporating the graded elasticity we talked about in the meeting on Friday.
stress concentrations: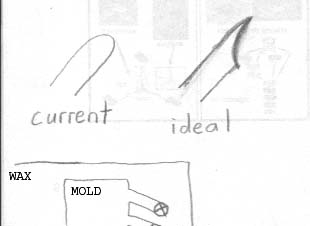 comments: Sangbae brought up this idea from the Gao talk. I have sketched the current profile of a lamellae and the ideal profile of a lamellae (according to Gao) for minimizing local stress concentrations at the edge of the ridge. We could attempt to manufacture lamellae with this kind of tip by inserting silicon rings (1/32" diameter) at the tip end of the molds.
comments: Sangbae brought up this idea from the Gao talk. I have sketched the current profile of a lamellae and the ideal profile of a lamellae (according to Gao) for minimizing local stress concentrations at the edge of the ridge. We could attempt to manufacture lamellae with this kind of tip by inserting silicon rings (1/32" diameter) at the tip end of the molds.
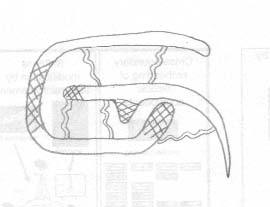 comments: The cross hatched area in the sketch show the stops. They will prevent the small flexures from overextending and causing toes to fail.
comments: The cross hatched area in the sketch show the stops. They will prevent the small flexures from overextending and causing toes to fail.
 -- AaronParness - 06 Apr 2005
-- AaronParness - 06 Apr 2005
- See FootDesign for other foot designs.
Sticky/Spiny Toes
- Lamellae inclusion
- simple inclusion
- graded inclusion
- stress concentrations
- Hard Stops
- Increased Toe Compliance
Lamellae Inclusion
simple inclusion
comments: This is the simplest and most straight forward way of including sticky feet features in the new integrated toe. The lamellae will consist of many tiny strings in this design, rather than ridges, however, because each toe's lamellae will be free to contact the surface independently from the toe next to it.
graded inclusion
comments: This is a more complicated design for lamellae inclusion that utilizes the range of PU that we have. By putting softer material in a large pad close to the wall, connected to the rigid toe with a semi-soft string, the foot tries to realize the '1000's of strings and pads' idea as well as incorporating the graded elasticity we talked about in the meeting on Friday.
stress concentrations:
comments: Sangbae brought up this idea from the Gao talk. I have sketched the current profile of a lamellae and the ideal profile of a lamellae (according to Gao) for minimizing local stress concentrations at the edge of the ridge. We could attempt to manufacture lamellae with this kind of tip by inserting silicon rings (1/32" diameter) at the tip end of the molds.
Hard Stops
comments: The cross hatched area in the sketch show the stops. They will prevent the small flexures from overextending and causing toes to fail.
Increased Toe Compliance
comments: One major problem in the first spiny foot design for the RISE bot was the failure of the sticky surface to adequately come into contact with the wall. The spiny toes were in essence, too rigid and protruded too far from the main portion of the foot. To fix this:- I plan to dimish the offset between the spine and the main foot.
- I also plan on using squiggly connections between the bottom section of hard PU and the middle, spine section. By using squiggly connectors rather than straight connectors, the spiny section of the foot gains greater compliance as well as overall stretch distance. Both of these characteristics are desirable.
- It is also important to note that by including lamellae, the foots effective distance between spine and sticky surface is reduced because of the soft PU's presence.
-- AaronParness - 06 Apr 2005
Ideas, requests, problems regarding TWiki? Send feedback