new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > ClimbingRobotPeople > AndrewSummerUpdates>GrabFoot (15 Jul 2006, AndrewWong? )
Rise Web>ClimbingRobot > ClimbingRobotPeople > AndrewSummerUpdates>GrabFoot (15 Jul 2006, AndrewWong? )
Here's another grabfoot concept inspired by S. Hirose and Y. Umetani, The development of soft gripper for the versatile robot hand, Mechanism and Machine Theory, Vol. 13, pp. 351-358, 1978. or http://www-robot.mes.titech.ac.jp/robot/snake/sg/sg_e.html
This mechanism is controlled by a series of smaller and smaller pulleys.
Found via "A Force-Isotropic Underactuated Finger"
A bit of explanation: this idea was inspired by the human hand, and is a 1 dof finger that distributes force equally between segments while lying flat upon a surface. Each segment possesses its own pull cable, and somewhere beyond the ankle all of these pull cables are joined by a differential such that the tension distributed to each segment is equal.
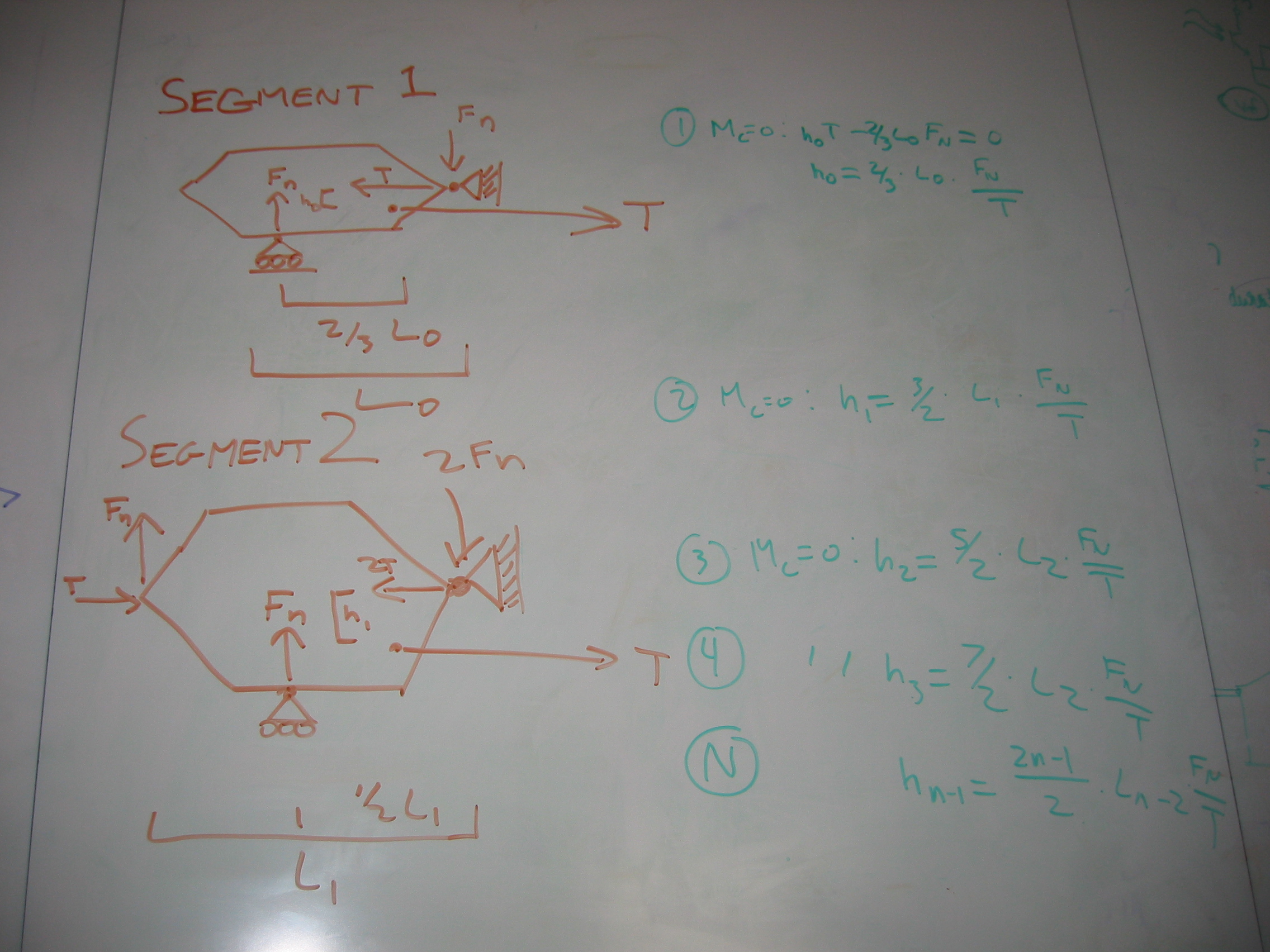 So the picture I put up contains the end equations that govern the ratio of height (vertical distance between the joint and the pull cable) and length (position of center of distributed load). A few assumptions:
So the picture I put up contains the end equations that govern the ratio of height (vertical distance between the joint and the pull cable) and length (position of center of distributed load). A few assumptions:
So the picture I put up contains the end equations that govern the ratio of height (vertical distance between the joint and the pull cable) and length (position of center of distributed load). A few assumptions:
- That I can approximate the ground reaction as a roller (which I justify by the inclusion of a soft elastic layer (the pad))
- That I can represent the next segment over as a fixed hinge and the previous segment as forces (if these conditions are fulfilled then buckling is impossible)
- Pull pull design allows for less interference with ankle movement.
- Can handle slightly concave and convex surfaces.
- May be able to grasp surface protrusions in the far far future.
- Force to tension ratio governed by geometry, additionally governed by lengths as opposed to difference of angles.
- Requires very careful manufacturing.
- Risk that my approximations are inappropriate
- More segments = less of the tension converted to normal force
- What happens in motion and while loaded?
- What are the acceptable geometries, and then what sorts of conversion of tension to normal force efficiencies are acceptable?
- How much normal do we need?
- How does it compare to Sangbae's?
- How well does it scale?
- Will friction be a problem?
- Note that I'm almost sure that loaded situation will be very problematic- may need to decouple shear and normal.
- Aand I need to make a prototype
Ideas, requests, problems regarding TWiki? Send feedback