new web: http://bdml.stanford.edu/pmwiki
TWiki > Rise Web>ClimbingRobot > ClimbingConcepts > ClawConcepts>ClawMechanics (28 Aug 2003, AdamPrickett? )
Rise Web>ClimbingRobot > ClimbingConcepts > ClawConcepts>ClawMechanics (28 Aug 2003, AdamPrickett? )
-- MarkCutkosky - 11 Aug 2003
On this page: WillP notes about gecko claw/pad engagement; ShaiRevzen notes on claws; AdamPrickett's pin experiments
Decided to added WillP 's email about gecko claw/pad mechanics here:
This leads to the question (which I think may be of general interest):
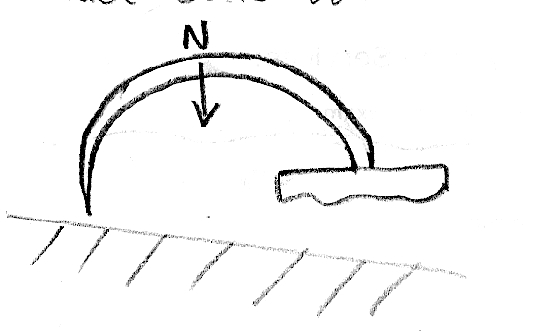
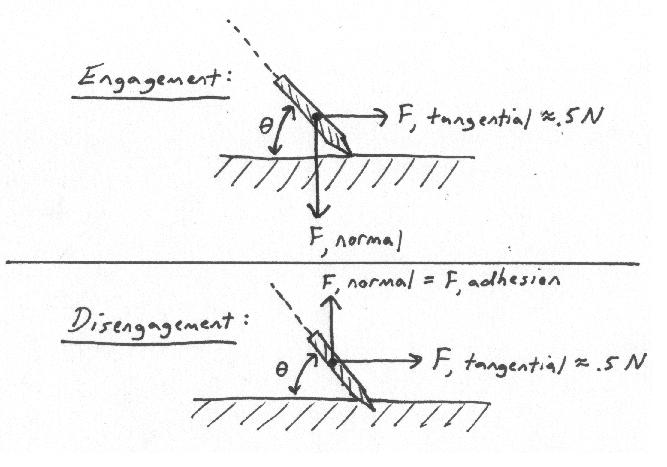
-- How does the threshold value of F behave as a function of theta, phi and material properties in the diagram of a "pin" sticking into a surface below?
I suspect that for theta > 90 deg. the range of phi for which the pin remains in the surface is quite small...
Decided to added WillP 's email about gecko claw/pad mechanics here:
From: William Provancher <wil@cdr.stanford.edu> Date: Sat Aug 9, 2003 9:49:12 AM US/Pacific To: Mark Cutkosky <cutkosky@stanford.edu> Subject: FOOT TRAJECTORY Re: foot/claw preliminary calculationsBy the way, after looking at many of the gecko movies, it seems clear to me that sliding the foot along the wall is part of the strategy to improve adhesion. this is important for dry adhesion to align the setae and also appears to set up a repeatable geometry for the claw to contact the surface. the gecko claws seem to be hinged very near the base of each claw. when the gecko is climbing on a smooth surface its claws glide along the surface and if the surface had features for the claws to hook onto, claws may become the dominant mode of adhesion. In other words, I hypothesize that it does not seem that a gecko adapts its climbing strategy when climbing on smooth vs. rough surfaces. So I would not expect the gecko to alter its foot trajectory on rough surfaces. On smooth surfaces it plants its heel and flexes its toes to bring them into contact with the surface. I wonder if clawed animals like squirels plant their heel/pad first or their claws first. I BELIEVE THIS IS A KEY POINT TO UNDERSTAND IF WE ARE TO MAKE MORE THAN JUST QUASI-STATIC CLIMBING ROBOTS.
=============================
-- ShaiRevzen? - 20 Jul 2003
I've been wondering about the following biological structural theme: claws tend to be close to sticky/soft
pads, connected to them by some kind of flexure. This lead me down the following line of thought:
Pads are really good for one thing - the give you the average normal to the surface (because they are large)
and they give a little friction with the surface, because they conform to it. So I suggest the following
hypothesis: the pad-flexure-claw design theme is there to ensure that claws reach the surface at a specific attack angle.
 |
 |
Pin Experiments
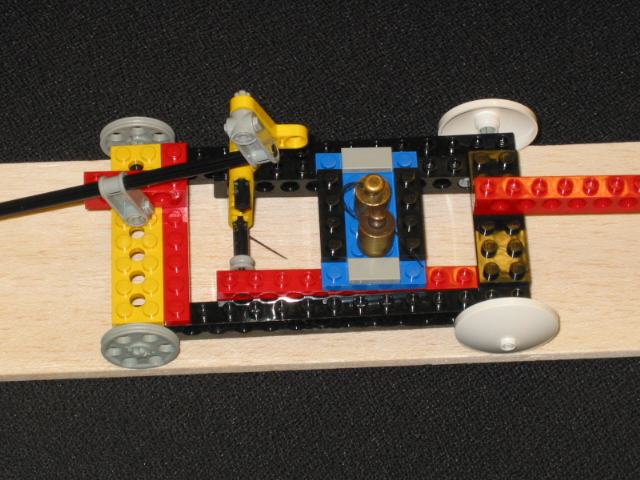
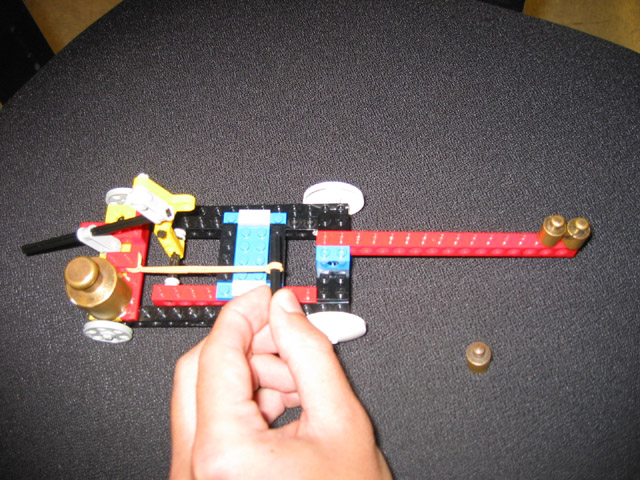
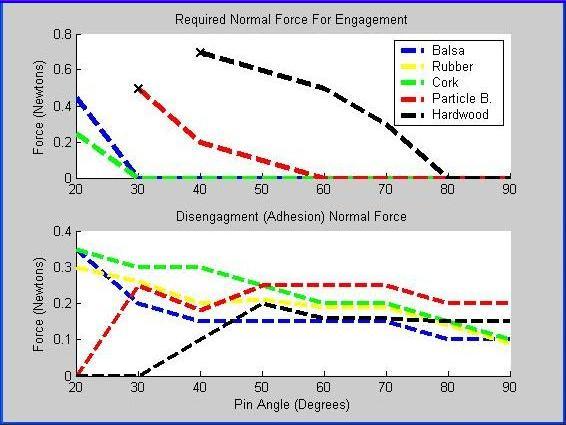
- AdamPrickett --- With the goal of learning about how claws engage and disengage with various surfaces, I have designed, with SeanBailey's help, a number of experiments. I made a lego cart with an inner frame (red and black) that can rotate relative to the wheeled chassis (the pins are at one end). The inner frame has at one end a lego axle with a pin pushed through the center, and at the other end it extends over the end of the chassis. This overhanging portion balances the inner frame over the pins so that with no weight on the inner frame, there is only a very slight force pushing the pin against the surface. There is a small platform (blue) on the inner frame where I loaded weights to test the amount of normal force that was required for the pin to engage with the surface. I loaded weights directly on the red lego piece at the far end to test the amount of upward force required to disengage the pin from the surface.- Note that the Lego cart is not super rigid and the bearings are not frictionless, so the data on forces and angles are not highly precise. Still, this is a useful measure of the normal force required to get a pin to penetrate the surface with slight lateral motion and a given pin angle -- essentially what the conditions we expect to see when a foot contacts the wall. The disengagement normal force component makes it clear that pulling out of soft materials could be problematic (see plots below) -- MarkCutkosky
- Claw Engagement Test:
- Claw Disengagement (Adherence) Test:
- Schematic of experimental procedure:
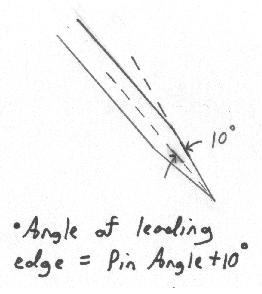
- Actual angle of leading edge = Pin Angle + 10 deg.:
- Engagement and Disengagement Forces:
- pindata2.m: Matlab file with raw graph data
Ideas, requests, problems regarding TWiki? Send feedback