new web: http://bdml.stanford.edu/pmwiki
TWiki > Perching2010 Web>CurrentProposals > CyberPhysicalNSF2010>CyberPhysicalText (05 Jan 2010, AlexisLD)
Perching2010 Web>CurrentProposals > CyberPhysicalNSF2010>CyberPhysicalText (05 Jan 2010, AlexisLD)
Summary
Premise: Getting a {group of?} small UAV(s) to land, perch and take-off reliably from arbitrary surfaces is a perfect example of a problem that requires an integrated computational and physical system.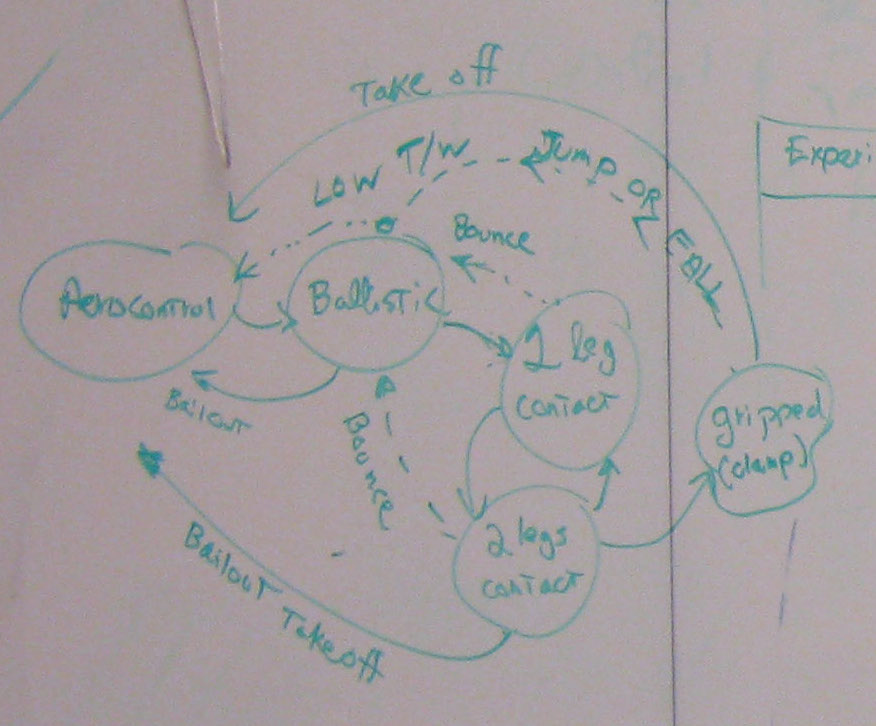
State transition diagram (need to make this figure) The goal of the proposed work is to develop methods that allow small, unmanned airplanes to reliably and repeatedly land, perch and take off from walls, rooftops and powerlines. The work involves a combination of learning dynamic maneuvers from repeated trials (autonomous and expert guided), perception, and mechanism design. The severe weight budget for small planes requires a highly integrated (versus modular) solution %u2013 we have to choose carefully among sensors actuators, computational power and mechanisms at each stage.
Guiding Tenets or Principles
Perching is a dynamic maneuver, characterized by short reaction times and considerable uncertainty (e.g. wind gusts). It is an example of a maneuver in which information (e.g. about local air and surface conditions) improves, as the ability to respond decreases. Reliable perching requires a cyberphysical approach, that integrates robust control with learned, open-loop aerodynamic maneuvers and a tuned mechanical system to absorb energy and facilitate attachment Failed landings can provide information for subsequent attempts, allowing strategies adjusted for specific conditions to increase the ability of UAV flocks to land reliably and repeatedly. older stuff: improving the robustness and reliability of UAVs for repeated landings Learning from repeated trials needed (validation approach) because (i) subject to failure because no single adhesion mechanism is performing properly on ALL surfaces (ii) susceptible to optimization for changing conditions Can learn offline (something?) useful online Costly to explore state space but also limited in sensing, computational power so tradeoffs... Need to tradeoff cost of exploring state space Understand ambient conditions --> useful to modify trajectory for success. Need to understand state space. By observing states transition after an action, we can get some insight into ambient conditions and the environment Some Tenets from another proposal that would work for us: Simplicity is essential In our case the weight constraint limits: mechanical complexity, computing power, sensory information... but also for mechanical robustness during impact. Put functionality in passive mechanism, not in sensing and control Explore the funnel and take advantage of them to add robustness and simplify. Also, in final stages the time is too short and authority too little (low speed = low airflow on the control surfaces) for closed loop control Learn from nature, not replicate it i.e. shifting mass for maneuverability instead of flapping wings... fall or jump? Starts with robust grasping, not dexterous manipulation Maybe something like starts with the requirements of the landing and expand to the sensors and control system... Classic NSF framework:- hypothesis,
- research plan (strategy, methodology, and controls)
- anticipated results or findings
Previous Work
Roadmap: Research Overview and Scientific Questions
Write questions for year 1, year 2 and year 3 and then develop themDistill the fundamentals of the perching maneuver
- Q. How to go from full state feedback control method (reinforcement learning) to simpler controller. Can we find a lower order controller from an higher order controller? Can this guide us in the choice of sensors?
- Q. Should we control the joint properties (stiffness, damping, etc) during landing? If so, how should we control them in order to ensure successful landing?
- Q. How can we expand the existing suspension to work with dry adhesives?
- Q. What is the envelop of flight conditions away
Enable low thrust-to-weight ratio takeoff
- Q. How should we takeoff with a low T/W ratio?
- Q. What are the tradeoff between the drop in altitude during takeoff and the maximum T/W ratio?
- Q. Should we use jumping or is releasing properly from the wall is enough? If we jump, in which direction?
- Q. Would center of mass shift be also useful in this case? Kind of like tucking yourself when doing a flip...
- Q. Can we store energy during landing for immediate takeoff (kind of a releasable ratchet mechanism)
Sensing and Control
Sensor design to suit the chosen controller- Q. Can we perform the maneuver without full-state feedback? How many sensors are required to perform the maneuver?
- Q. Which sensors would provide the most useful information without being too heavy?
- Q. Can we get more information on the wall surface as we get closer?
- Q. Can we detect electrical wires from far enough, and with sufficient precision, to land on them?
- Q. Can we measure the cause of the failure (ratio Fn/Fs, too high impact velocity, no asperities on the wall, etc)?
Integration and validation
Research Plan
see: PerchingResearchPlanIntellectual Merit:
- Challenging example of learning, in the context of rapid, skilled and substantially open-loop maneuvers
- An opportunity to explore %u201Clearning from failure%u201D %u2013 an under-explored topic in robotics
- Integration of cyber + physical intelligence in an application that demands it, due to severe limits on weight and system complexity and due to the need for physical robustness (crash tolerance)
Broader Impact:
- Greatly increases practicality of small UAVs for search & rescue, inspection, surveillance. Goal is to have UAVs that a non-expert can easily supervise for repeated landing, perching, take-off.
- The findings concerning integration of computation and design, learning from example and learning from failure can be adapted to other applications involving small, quick robots that must cope with uncertainty
Older notes
like other tasks for which skill is required (e.g. shooting a basketball, .... skateboard) it involves complex dynamic maneuver that bailout idea --- takes advantage of the dynamics and morphology of the mechanical system, i.e., of particular kinematics and structural elements with (typically nonlinear) stiffness and damping) to simplify the planning and control, increase stability and broaden the range of conditions over which a particular strategy will work. This embodied intelligence [Pfeifer07] is also referred to as "preflexes" (analogous in function to reflexes, but with zero-order response) in the biology literature.
- is learned through repeated trials and is relearned as ambient conditions change (e.g. under windy conditions) or the hardware changes (e.g. when using a new piece of sports equipment).
- involves motion planning and control but is fast enough that the final actions are substantially open loop
References
[Pfeifer07] Rolf Pfeifer, Max Lungarella, Fumiya Iida, "Self-Organization, Embodiment, and Biologically Inspired Robotics." Science 16 November 2007: Vol. 318. no. 5853, pp. 1088 - 1093-- MarkCutkosky - 16 Oct 2009
Ideas, requests, problems regarding TWiki? Send feedback