new web: http://bdml.stanford.edu/pmwiki
TWiki > Main Web>TWikiUsers > SamsonPhan > TwoTenacious>SkiGuide (20 Feb 2009, SamsonPhan)
Main Web>TWikiUsers > SamsonPhan > TwoTenacious>SkiGuide (20 Feb 2009, SamsonPhan)
Ski Guide
The idea is to have a mechanical guide to allow the robot to hug the wall and turn corners. If we drive the motors at slightly different speeds, then we can ensure that the robot will slide along the wall. We built a small stage and a cardboard prototype to prove the concept. We were inspired by team knack from previous years, using a mechanical solution to solve the the navigation problem. -- SamsonPhan - 19 Feb 2009- DSC00020.JPG:
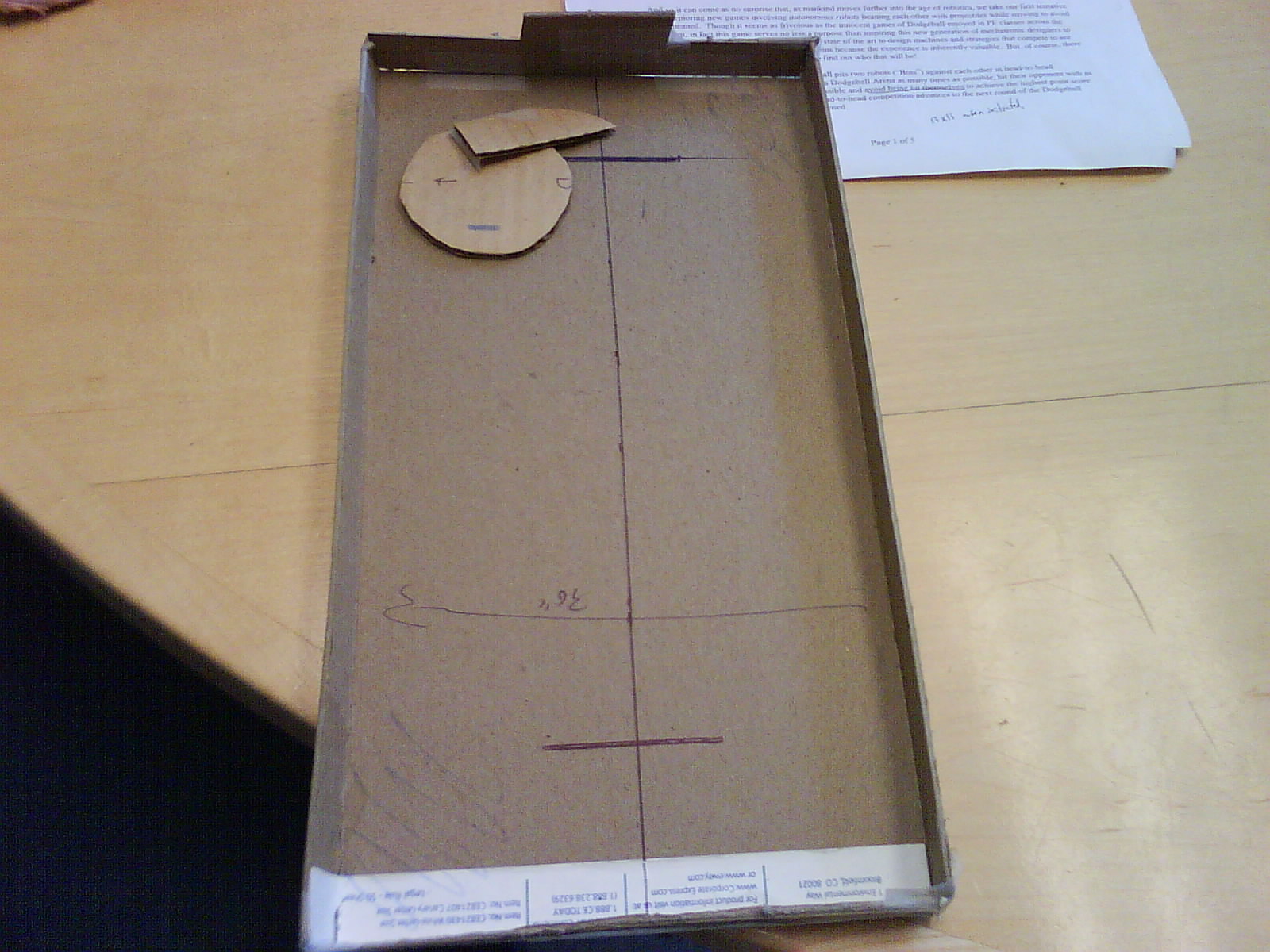
Lessons Learned
- Design and angle of the guide appears to matter greatly.
- The apex of the guide must reach across the centerline of the craft.
- the angle of the guide at the apex must be sharp enough to deflect path, not cause craft to just bounce back
- A smooth curve will reduce shock loading to rest of system
- Balls might interfere with how it work. Solution: have guide higher than diameter of ball. Put ball deflector on bottom Or have the ski guide slope downward such that it gets under the ball. Or have guard below cg of ball (that will knock them over the guider). If we angle down, then there may be a possiblility it will lift wheels off ground
- Make it as long as possible. This will decrease the distance we have to travel
- We don't need trailing edge guide
- It works!! see video here. concept_test.3GP:
Ideas, requests, problems regarding TWiki? Send feedback