new web: http://bdml.stanford.edu/pmwiki
TWiki > Main Web>StanfordHaptics > HapticsForGaitRetraining > PortableSystemForGaitRetraining>PortableHapticsSystemHardware (20 Dec 2010, WisitJirattigalachote)
Main Web>StanfordHaptics > HapticsForGaitRetraining > PortableSystemForGaitRetraining>PortableHapticsSystemHardware (20 Dec 2010, WisitJirattigalachote)
Portable Haptics System Hardware
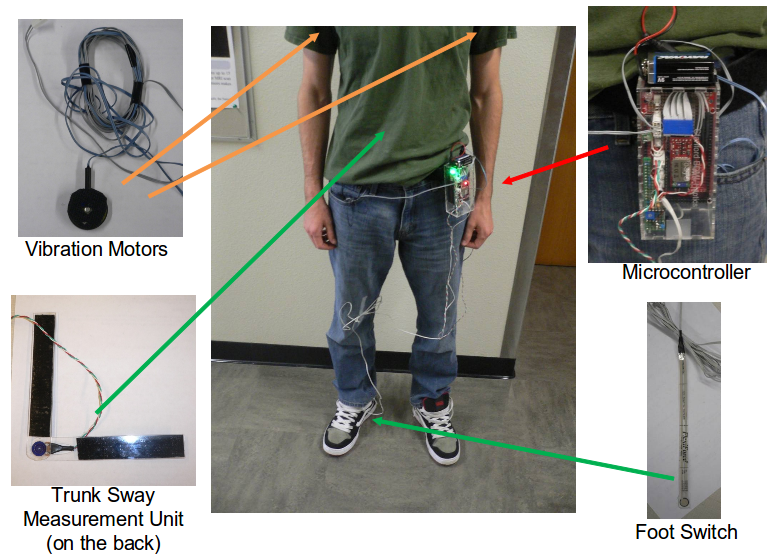 |
Our Portable Haptics System for Gait Retraining consists of five main hardware components: |
Mobile Phone
There is a wide selection of mobile phones on the market. For our development, we chose Nokia 6210 Navigator due to its ability to run Java, accompanied by Bluetooth communication, and its small form factor. The phone mainly acts as a remote control for setting up the microcontroller. It provides the ability to adjust the trial condition configurations and let the microcontroller knows how the sensors and actuators are connected, eliminating the need for uploading a separate piece of code on microcontroller. It also acts as a visual feedback device for the user as well since it can display important gait parameters in real-time. Some mobile phone screenshots while in use: Startup Screen |
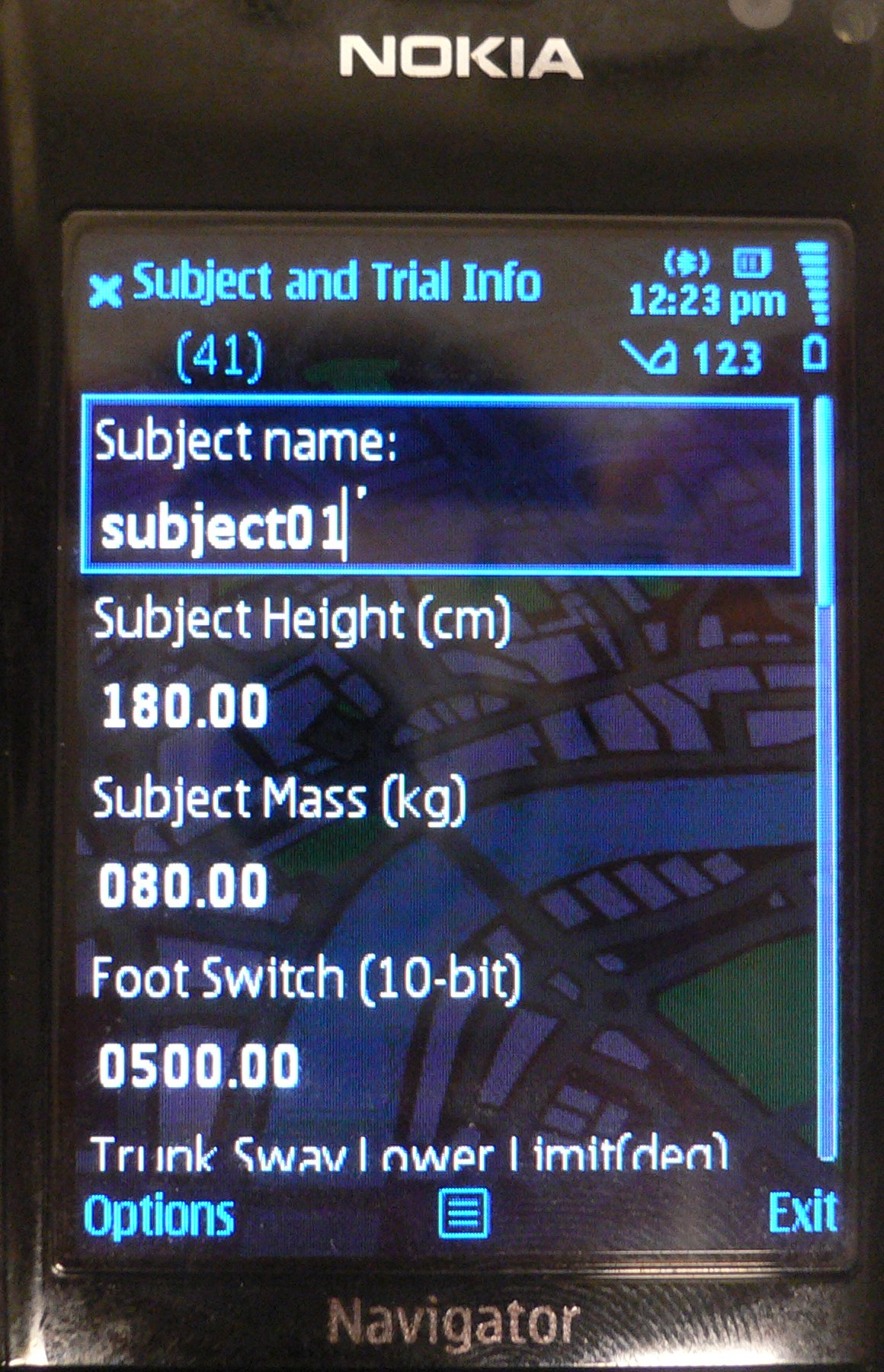 User Parameters Setup |
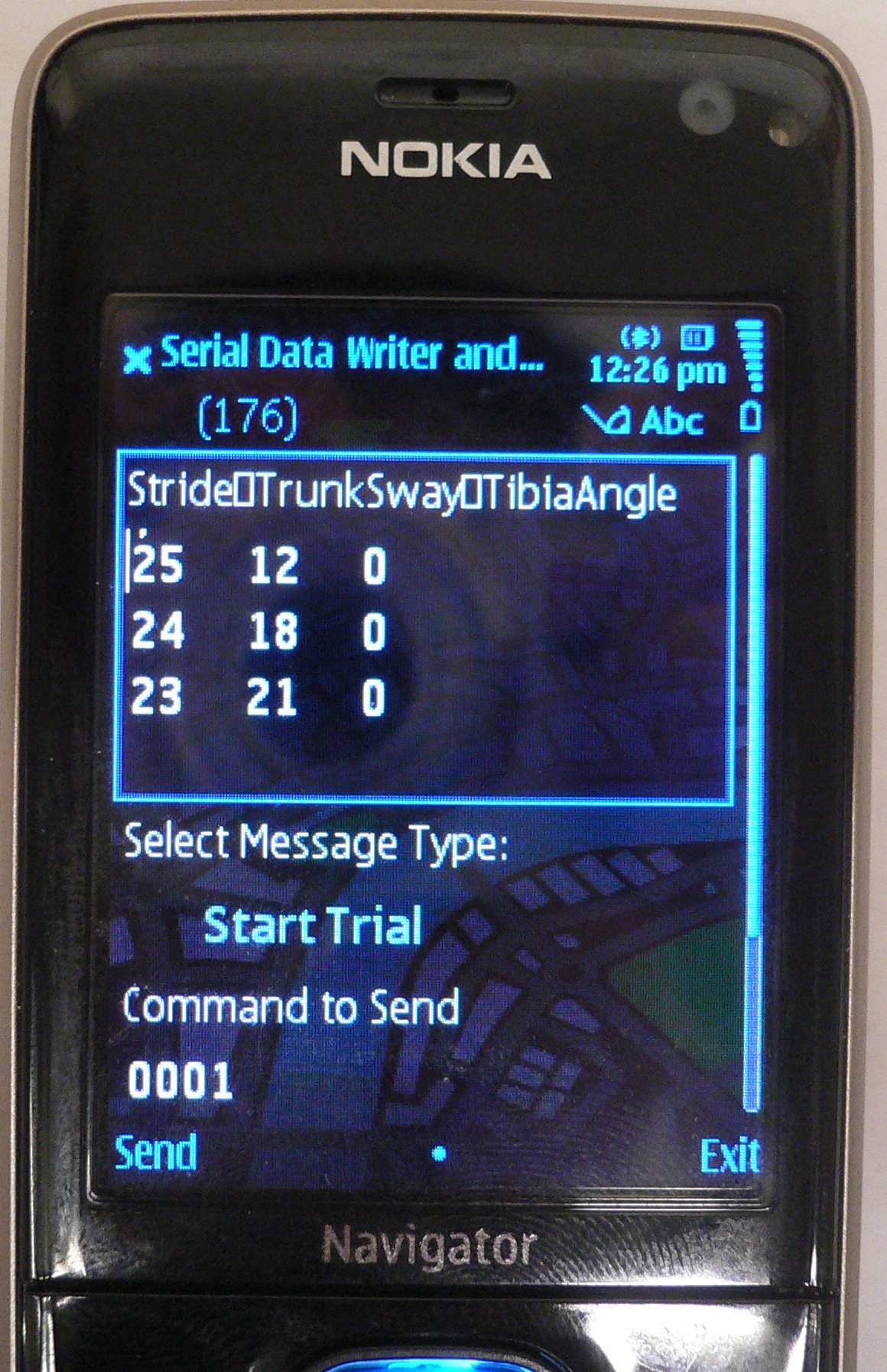 Display of Real-Time Gait Parameters |
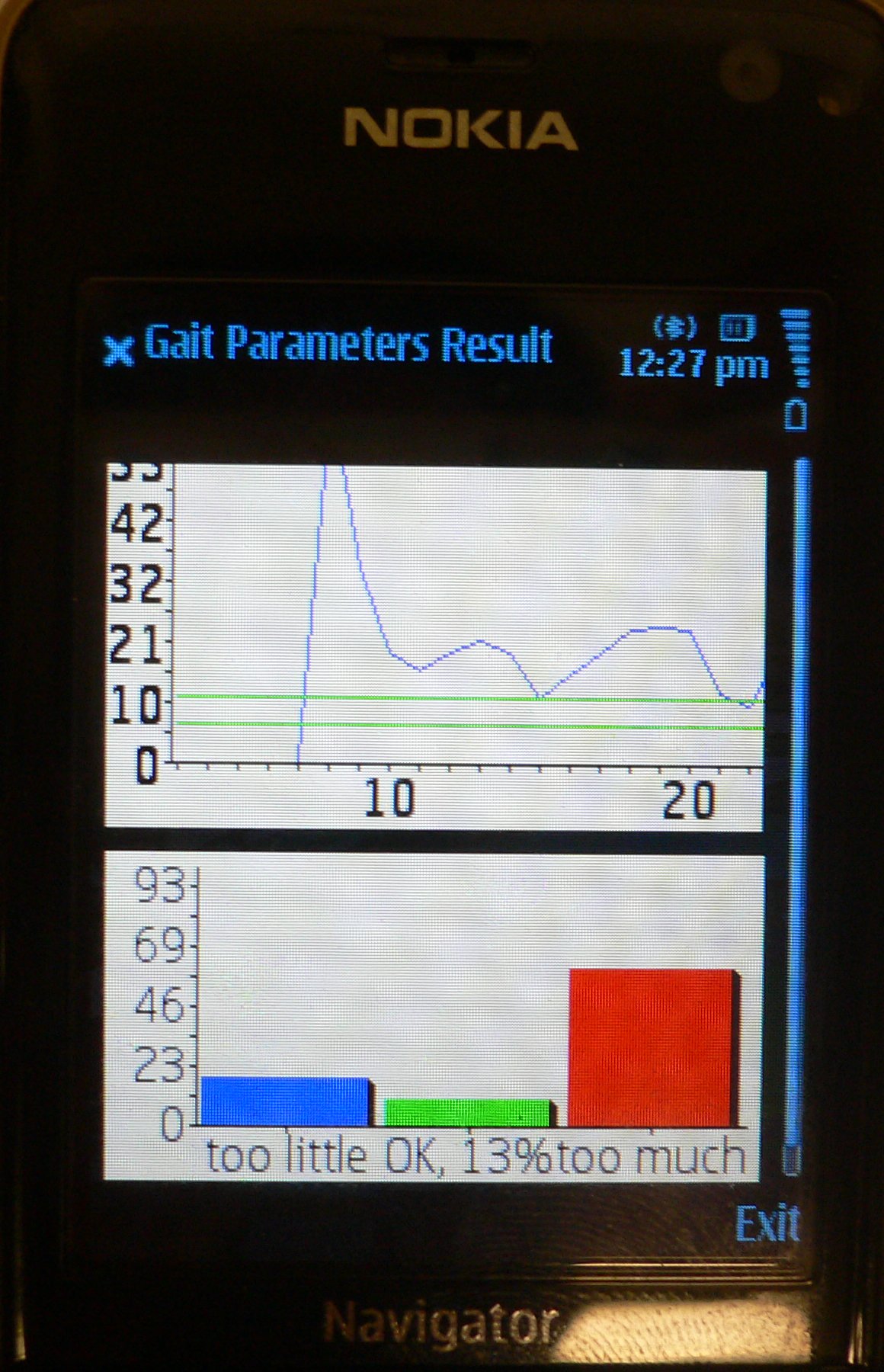 Display of Trial Overall Result |
Microcontroller
We selected an Arduino Mega as our development microcontroller due to its large numbers of analog input pins, digital I/O pins, UARTs, and its complete development form factor. This provides us with fast development time for our first testing device. For more information on microcontroller selection, please see Microcontroller Table We also used a stackable prototyping shield board to prototype our customized C2 Tactor (vibration motor) driver circuit. Some pictures of the microcontroller along with our customized circuits: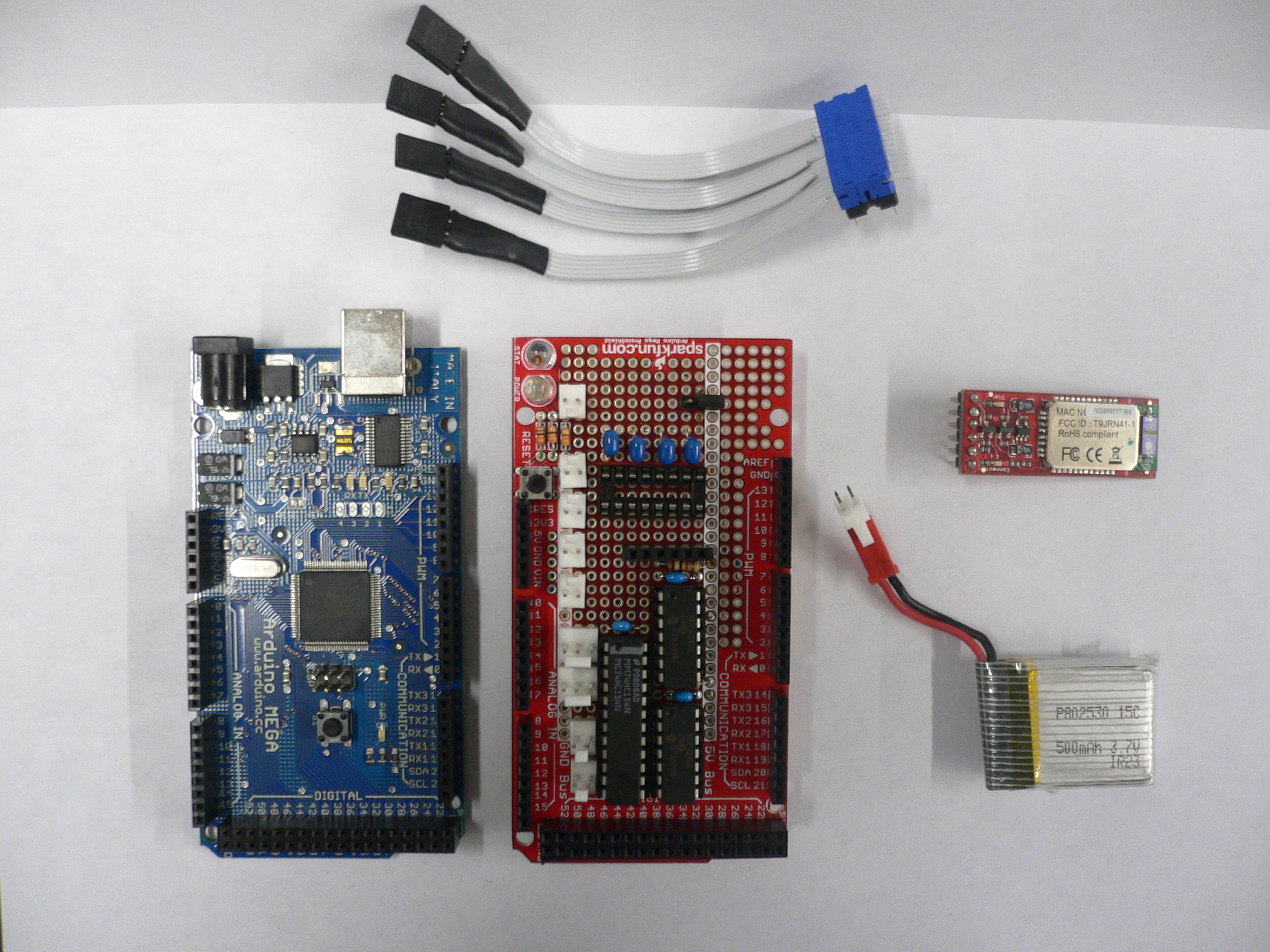 From bottom left, counterclockwise: Arduino Mega, Customized C2 Tactor Drive Circuit, Li-Po Battery, Bluetooth Modem, and Voltage Regulators |
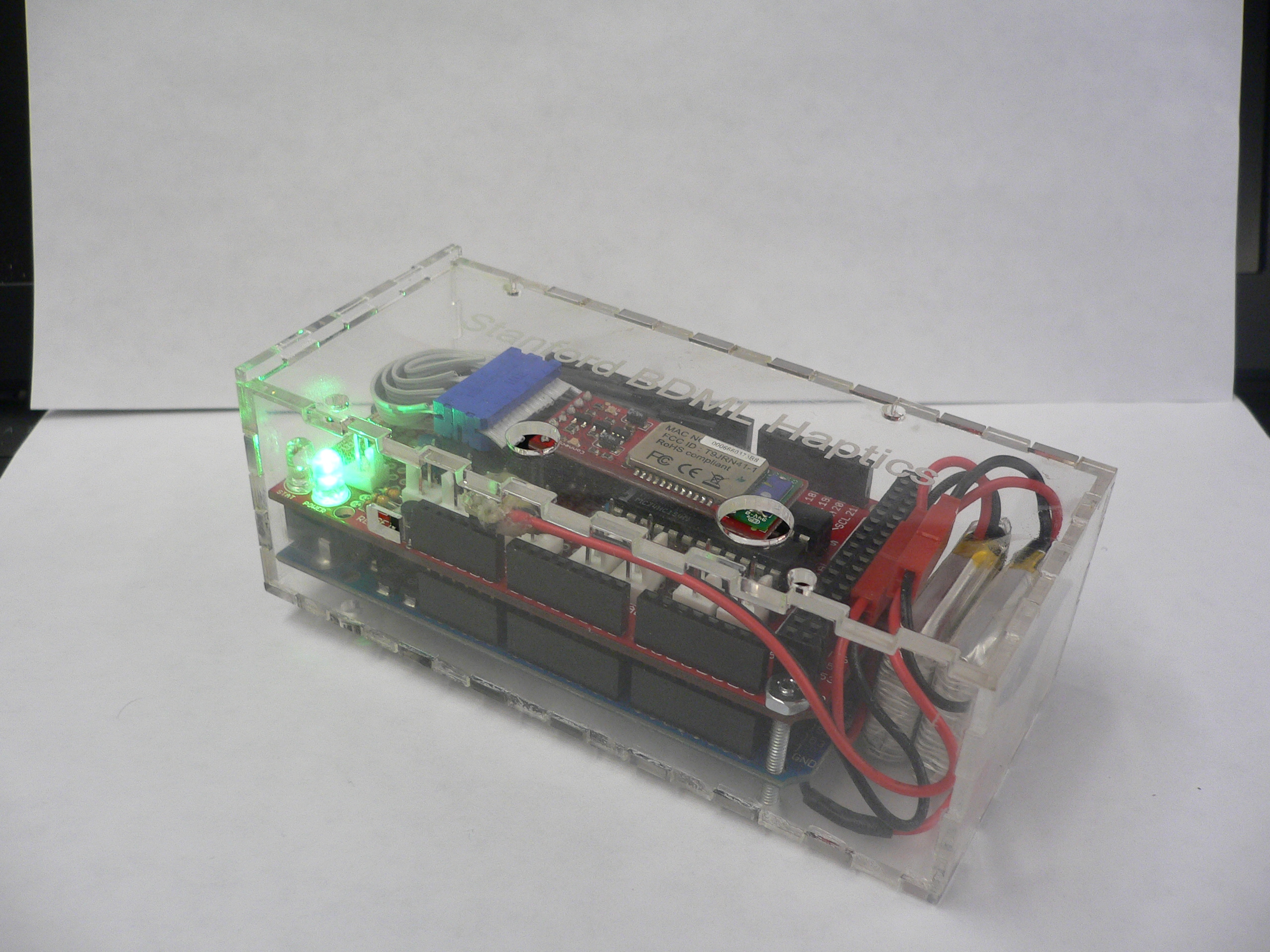 Closeup of Portable Device in a case |
Actuators

C2 Tactor
C2 Tactor is a special kind of vibration motors. It requires a 250 Hz sine wave drive circuit. Its magnitude of vibration corresponds to the amplitude of the sine wave. Since we cannot use a typical PWM signal on microcontroller to drive the tactors, we have implemented an adjustable voltage regulator with digital potentiometer to drive these tactors. See circuit diagrams.Pager Motor
Another option for vibration motor is a pager motor. This kind of motor can be driven directly from the PWM signal. These have been used in our Haptics for Gait Retraining Pager Motors.Sensors
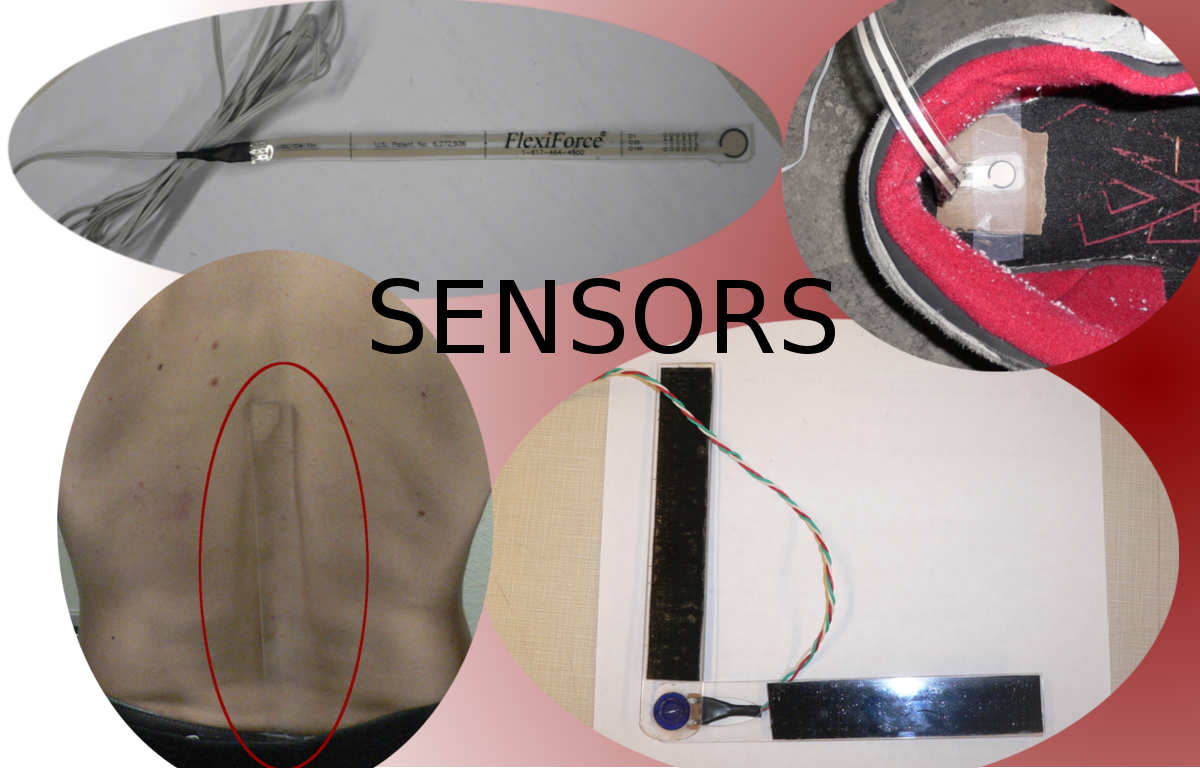
Flexi Force
Flexi Force is used as simple foot switch. However, it has the potential to do an accurate force measurement with some calibrations.Single-Axis Angle Measurement Unit
This sensor is based on low-friction linear potentiometer. We used it to measure an angle such as trunk sway.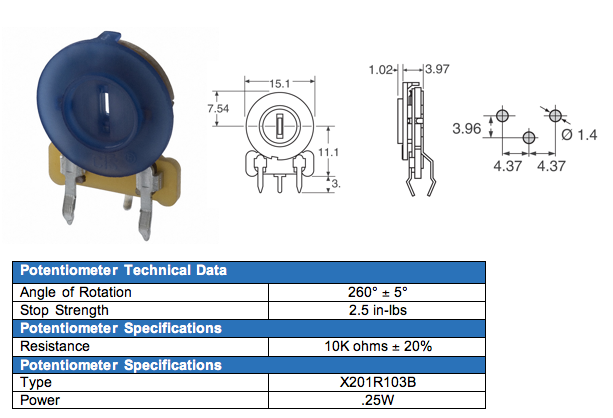
- For more info on the Trimmer 201XR Potentiometer: Linear Potentiometer DataSheet.pdf
- Digi-Key Part Number: 201XR103B-ND
Dual-Axis Angle Measurement Unit
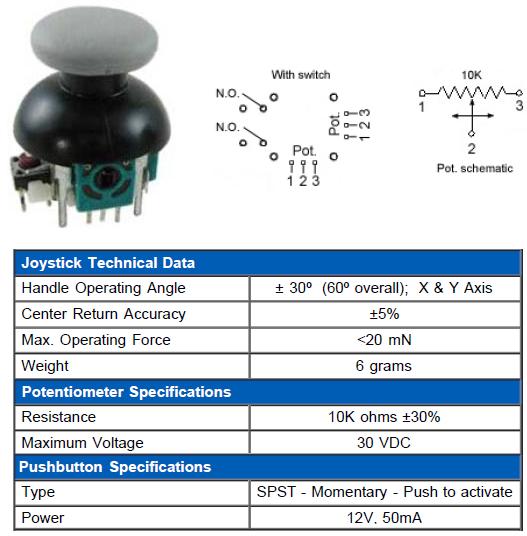
- For more info on the Joystick Pushbutton: Joystick DataSheet.pdf
Wearable Components
These are some components we prototyped mainly for sensors attachments.Back, Tibia, Knee, Elbow Angle Sensors
- Corel DRAW files attached (must open with X5 version)
- kneeElbowGoniometer_6in.cdr: Corel Draw file for the 6 in goniometer for measurement of knee or elbow flexion/extension
Ideas, requests, problems regarding TWiki? Send feedback