new web: http://bdml.stanford.edu/pmwiki
TWiki > Haptics Web>StanfordHaptics > TampereStanfordPortableHapticsProject > TauchiRehabilitationProject>HapticBall (04 Apr 2008, LiJiang? )
Haptics Web>StanfordHaptics > TampereStanfordPortableHapticsProject > TauchiRehabilitationProject>HapticBall (04 Apr 2008, LiJiang? )
Introduction
11 December 2006 MarkCutkosky The information on this page has been started to provide documentation regarding a prototype for the mobile haptics project between Tampere University and Stanford BDML. The idea originated with researchers at Tampere University, to create a "stress ball" that people could manipulate to communicate and influence others. Please use the "COMMENT" tag (like this) if you would like to annotate some existing text %ENDCOMMENT% Based on further investigation by LiJiang? , the following concept was put together. The device ties together the motions of the left and right hands so that it can be worn by patients who are recovering from stoke or other traumatic injury as part of a therapy, as well as ultimately providing a means for communication. Ulimately there may need to be two different versions of the device: one targeted at facilitating emotional communication and one targeted at therapy.Haptic communication and motor rehabilitation with a stressball
Interactive haptic stress ball might provide new possibilities as a communication device. Ball could be used for entertainment and play purposes for the visually impaired or elderly people). This kind of a using context for a haptic stress ball might be also a good starting point for further development of the device (i.e. starting from robust design and simple functions towards more sophisticated design and versatile functions). In the first phase, a couple of actuators and sensors attached in the ball might be sufficient. An example of a further development phase might be, for example, a physical rehabilitation with the ball. In this scenario, the ball could be used as a tool in rehabilitation sessions for patients having difficulties in their hand motor coordination. Directing haptic sensations to impaired body areas (in this case the fingers) might be beneficial in rehabilitation of fine touch sensitivity and fine motor controlling.Need Finding and Benchmarking for Haptic Ball in Rehabilitation
One of our scenario for haptic ball's application is hand rehabilitation. One of the most important things we have been doing is benchmarking. I visited Stanford hospital rehabilitation center to talk with physical and occupational therapists. Here are some important notes: 1. For stroke patients, some of them lost their touch sensation completely alone with their mobility of the arm. This might create obstacles for us to use haptic ball, since these patient cannot feel anything. 2. Lots of stroke patients lost their mobility on one arm. It seems more important to train they to learn how to move their arm rather than move their hand. 3. When patients' muscle starts to recover, muscles on the inner part of arm recover faster than the muscle on the outside. So usually patients' arm will crouch and their hand will grasp. At this point, it is very important to help the patient to train their muscle which is located on the outside of their arm and hand. Here are some simple rehabilitation tools I saw in the Stanford Hospital:









Prototypes
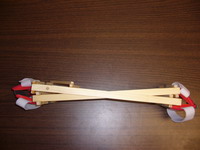
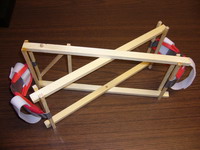
After a series of benchmarking and need finding, We found that one of the biggest issue for people who had stroke is opening their effect hands. Many people who had stroke lost their control for their hands. After a certain mount of rehabilitation exercise, The first part of motion that come back to patients' hand usually is closing the hands. However, most of the patients are not able to open their hands by themselvs. There are evidences to show that making the affected side of patient to follow the unaffected side helps rehabilitation. Panasonic developed a "suit" that can help patients' elbow motion on affected side to follow the unaffected side. And this device is listed as one of the 2006 Times best invention. http://www.time.com/time/2006/techguide/bestinventions/inventions/medicine4.html The prototype we are working on is designed to be focused on the hand rehabilitation. Currently we are building a device that can help the affected hand to follow the motion of unaffected hand. There are many ways to achieve this. One of them could be a cross bar mechanism.The First Prototype:
Here is early prototype we did using cross bar mechanism:
 Here is an interesting ball called Phlat Ball:
Here is an interesting ball called Phlat Ball:
 Let's take a look at the inside of the ball:
Let's take a look at the inside of the ball:


The Second Prototype
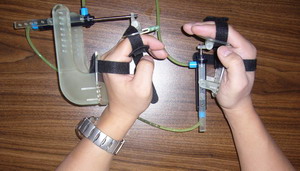
The second prototype is a hydraulic system, which can allow you to use your unaffect hand to help your affected hand to open and close: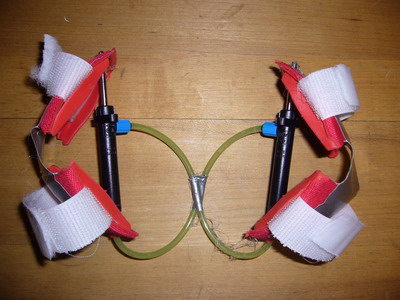


- Please checkout this movie to see how exactly it works: P1020143.MOV:
Prototype Three
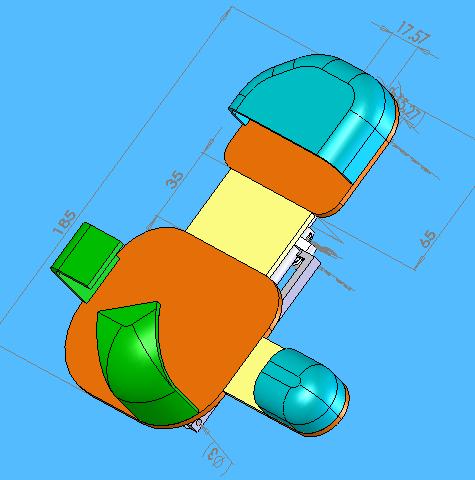
Here are some pictures of our prototype three. It is a still a model in solidworks:- Top View
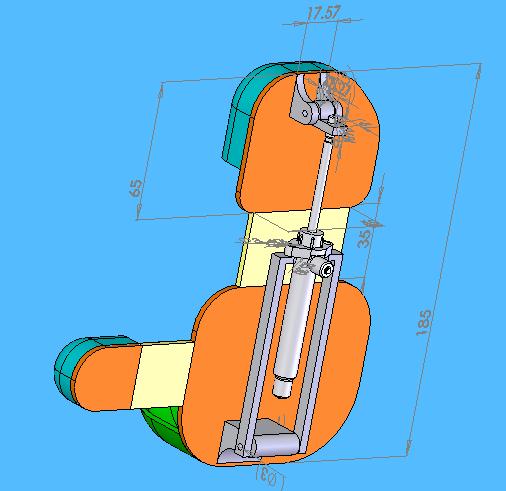
- Botton View

Prototype Four
Because prototype three cannot hold one's hand very tightly in the position. Velcros were used in this prototype to hold one's hand: (The dimention of the prototype was also changed to fit one's hand more comfortably)- Proto4 system view:

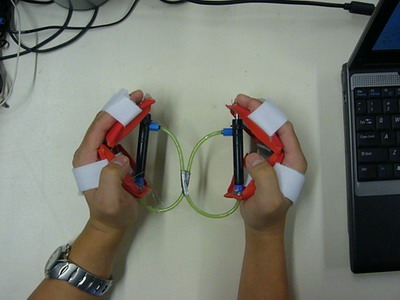
- Proto4 with hand 1:

- Proto4 with hand 2:

- Proto4 with hand 3:

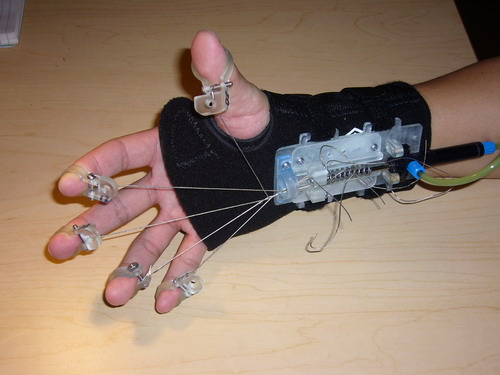
Prototpye 5:
- Proto5:

- Proto5_0:
- Proto5_1:

- Proto5_3:

- A short vedio shows that how prototype 5 works: P1030080.MOV
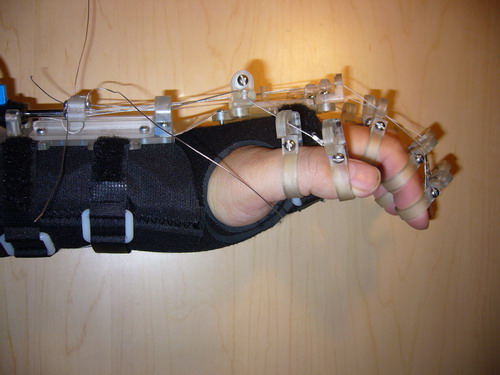
Prototype 6
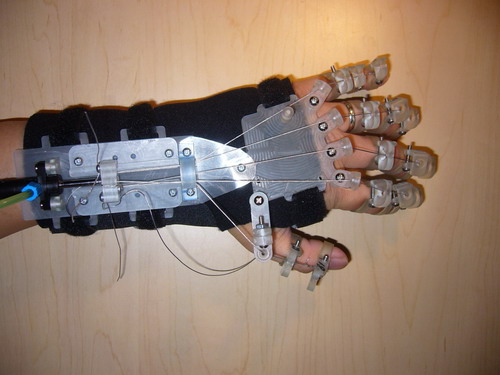
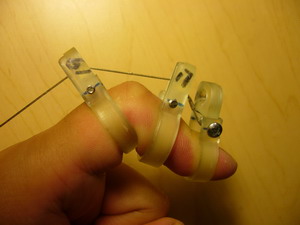
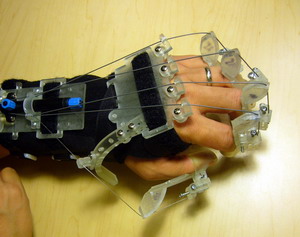
A new cable driven system is designed as Prototype 6 Here are some pictures of the parts that hold users' fingers in prototype 6.- Hand with finger holders: through this picture you can see how the finger holders will be attached on users' hand. The small hole on the top part of each finger holder is designed to hold the cable.

- This is the top view of the fingerholder :

- Side view of fingerholder: You can see the small hole which is designed for holding the cable very clear here. Since we need to reduce the friction between the part and the cable, so the surface of the hole is very speical manufactured to get the smoothness.

- Bottom View of fingerholder: viewed from the other side of holder

- Different size of holders: Since users have different finger sizes, parts with different sizes are munufactured

- Finger With Fingerholders :

- More pictures :


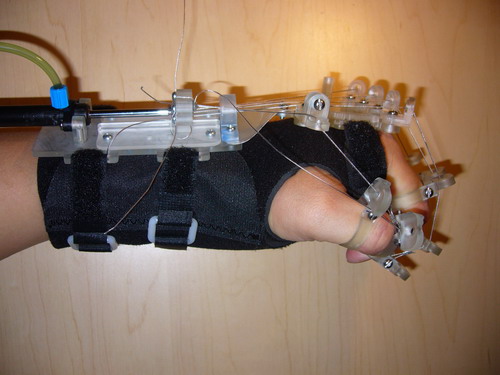
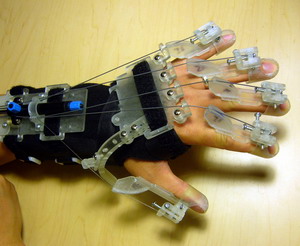
- Top View of Impaired hand:
- Side View of Impaired hand:
- Side View 2:
- Good hand 1:

- Good hand 2:
- Using the good hand to help the impaired hand to open:
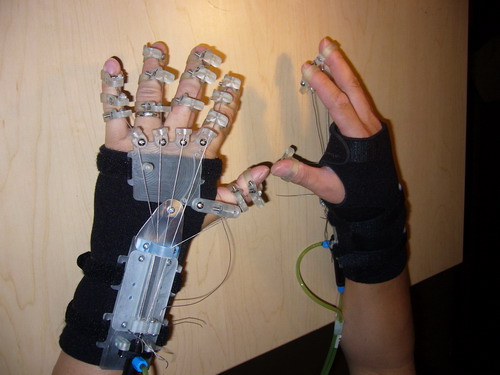
- Hands closed:

Updated May 21st, 2007
In the past few weeks, I built the prototype 6 and brought it to some stroke patients and tested it with the patients, also I did some simple test with the patients to determine their level of touch sensation. Here are the main results and observations: Observations: I did some simple test on some stroke patient about their sensation on the impaired hand: 1. I applied the same amount of force on both the patients' finger tip of the good hand and the impaired hand, then I asked them to rate the feeling on the impaired hand, given the feeling on the good hand is 10. Total number of patient: 5 number of patients that rated the feeling below 2: 3 number of patients that rated the feeling below 6: 4 number of patients that rated the feeling below 9: 5 2. I asked the patients to close their eye. Then I touched one finger tip of their impaired hand and ask them where did I touched. Number of patients that couldn't tell where I touched : 3 Number of patients that could tell where I touched : 2 I tried the prototype 6 with some patients and here are the results: 1. The patients' impaired hand can be opened by the device. 2. The finger holder design of prototype 6 is mainly concerned about the ease of wearing. The tests showed that it was fairly easy for the patient to put on the finger holders, since on each finger there are three independent holder and they can put it one by one. 3. The contact area of the finger holder is small. So it is not very comfortable after wearing it for some time. 4. It was observed that when patients tried to open their hand, sometimes the pulling cable can not make the second knuckle extend. Please see the picture below:- P1030826-s.jpg:
Based on the results, I redesigned the finger holder and then I built the new finger holder:
- NewFingerHolder? :

- SupportPart? :

- FingerTip? Holder:

- TopViewoftheTipHolder? :

- IndexFingerwithHolder? :

- SecondKnuckleGetExtended? :

- FullHandwithNewHolder? :
- SideView? :


Updated June 12th, 2007
Pictures of testing prototype on stroke patients:- P1030861_c.jpg:
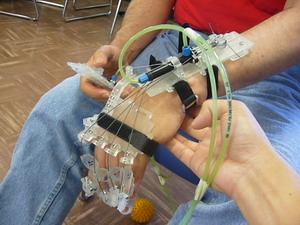
- DSC02052_c.jpg:

- LiJiangIASTED_FULL.pdf: IASTED Paper
- LiDefense-Final.ppt: LiDefense?
Ideas, requests, problems regarding TWiki? Send feedback