new web: http://bdml.stanford.edu/pmwiki
TWiki > Haptics Web>StanfordHaptics > PhotonicRobots>DesignConcepts (07 Jun 2006, YongLaePark)
Haptics Web>StanfordHaptics > PhotonicRobots>DesignConcepts (07 Jun 2006, YongLaePark)
Design Concept of Smart Finger
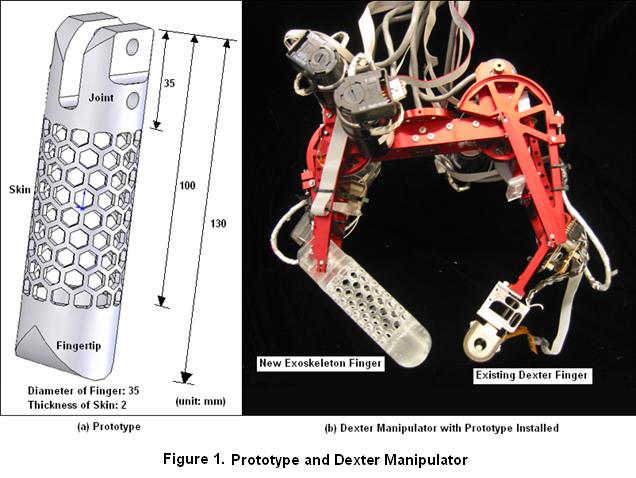
Figure 1(a) shows the 3-D model of the first prototype and its dimensions. The prototype is a cylindrical exoskeletal robot finger with honeycomb patterned skin structure made of polyurethane. Since the prototype will replace the lower finger of the Dexter manipulator as shown in Figure 1(b), its dimensions are set to fit the Dexter. Multiple FBG sensors will be embedded into the honeycomb skin structure for collision and grasp force dectection. Advantages in the design:- The exoskeletal structure allows light weight with relatively high strength.
- The narrow skin pattern enables the structure to concentrate stresses and strains on each rib, and it will be easy to find where to embed the sensors.
- The honeycomb structure can minimize the amount of material for fabrication and weight while maximizing the structural strength. Although it is possible to divide an area equally with equilateral triangles or squares, the sum of the lengths of all sides will be larger than those of hexagons to have the same area of the pattern.
- The structure can deform not only partially but entirely depending on different force types. This will allow the finger to measure and localize applied forces intrinsically as well as extrinsically, which will be useful for both grasp force measurement and contact force localization.
 -- YongLaePark - 30 May 2006
-- YongLaePark - 30 May 2006 Ideas, requests, problems regarding TWiki? Send feedback